

Лекция 2. Геометрическая интерпретация решения задач линейного программирования
План
1. Геометрический смысл задачи линейной оптимизации.
2. Алгоритм графического решения задач ЛП.
1. Пусть дана задача ЛП:
Z = c1 x1 + c2 x2 + ⋅⋅⋅ + cn xn → max , (1)
+
a
x
+
⋅⋅⋅
+
a x
≤
b
⎪
⎪a21 x1 22 2 2 n n 2
⎨
⎪.......................................
⎪⎩am1 x1 + am 2 x2 + ⋅⋅⋅ + amn xn ≤ bm
(2)
x j ≥ 0 ( j = 1, n ). (3)
Рассмотрим систему ограничений (2) с геометрической точки зрения. Ка-
2
ждое равенство
a1x1 + a2 x2 = b
определяет прямую в пространстве
R . Эта пря-
мая делит координатную плоскость на две полуплоскости, определяемые нера-
венствами
a1x1 + a2 x2 ≤ b
и a1x1 + a2 x2 ≥ b . Данные полуплоскости содержат
прямую в качестве границы.
3
Равенство
a1x1 + a2 x2 + a3 x3 = b
представляет собой плоскость в
R . Эта
плоскость делит пространство на два полупространства, задаваемые неравенст-
вами
a1x1 + a2 x2 + a3 x3 ≤ b и
a1x1 + a2 x2 + a3 x3 ≥ b . Граница полупространств –
данная плоскость – принадлежит им.
По аналогии равенство
a1x1 + a2 x2 + ... + an xn = b
называют гиперплоско-
стью в пространстве
Rn . Это граничная гиперплоскость для полупространств,
определяемых неравенствами. Т.о., система ограничений задачи ЛП (2) содер-
жит m полупространств из пространства
Rn . Если система совместна (имеет
хотя бы одно решение), то она определяет выпуклый многогранник, который является геометрическим образом ОДР. Аналогично с трёхмерным пространст- вом будем считать, что угловыми точками выпуклого многогранника в n - мерном пространстве будут его вершины, образованные пересечением гиперп- лоскостей.
Любая внутренняя и граничная точка ОДР является допустимым решени-
ем задачи. Приравняем целевую функцию к нулю. Тогда уравнение
c1 x1 + c2 x2 + ⋅⋅⋅ + cn xn = 0
определяет в
Rn гиперплоскость, проходящую через начало координат и пер-
пендикулярную вектору-градиенту
c = (с1, с2 ,..., cn ) . Направление вектора-
градиента показывает направление возрастания функции (рис. 1).
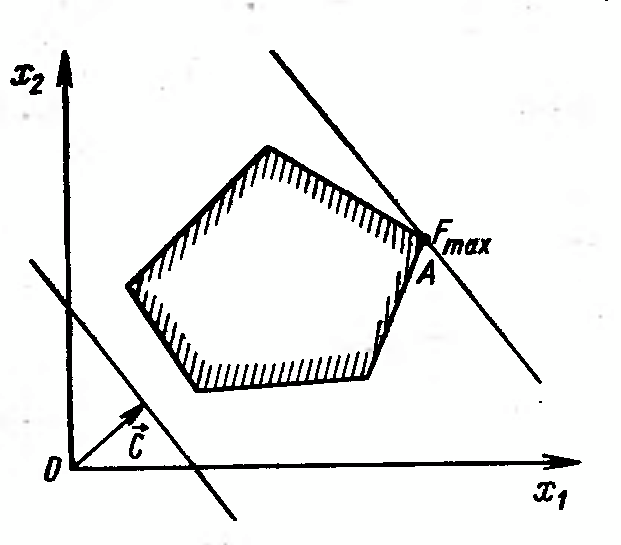
Рис. 1. Графическая иллюстрация задачи ЛП
Поэтому, чтобы найти максимум функции, необходимо передвигать па- раллельными переносами эту гиперплоскость в направлении вектора как можно дальше от начала координат, но чтобы она имела с ОДР хотя бы одну общую точку. Минимум целевой функции достигается в точке ОДР, которая будет ближайшей к началу координат при пересечении с перемещаемой гиперплоско- стью.
2. Пусть задача ЛП содержит только две переменные
x1 и
x2 :
Z = c1 x1 + c2 x2 → max , (4)
⎪ +
a
x
≤
b
⎪a21 x1 22 2 2
⎨
⎪.......................
⎩⎪am1 x1 + am 2 x2 ≤ bm
(5)
x j ≥ 0 ( j = 1, 2 ). (6)
Тогда все построения можно выполнить в координатной плоскости и решить
задачу (4)-(6) графически.
Приведём алгоритм графического решения задачи ЛП:
1. Записать уравнения граничных прямых
аi1 x1 + аi 2 x2 = bi
( i = 1, m ) и построить
их на плоскости
x1Ox2 .
2. Определить полуплоскости, которые соответствуют каждому ограничению-
неравенству с помощью контрольной точки.
3. Выделить область допустимых решений (ОДР).
4. Построить вектор
G
c = (с1 ,с2 )
– направление наибольшего возрастания целе-
вой функции Z :
G
c = (с1 ,с2 ) = gradZ
⎛ ∂Z
= ⎜ ∂x
, ∂Z ⎞ .
⎟
⎝ 1 2 ⎠
5. Построить прямую, перпендикулярную вектору c . Её называют линией
уровня или изоцелью. G
6. Перемещать эту прямую в направлении вектора c , если задача на максимум,
и в противоположном направлении, если задача на минимум, пока она не станет касательной (опорной) к ОДР.
7. Определить координаты оптимальной точки и вычислить оптимальное зна-
чение функции Z .
Рассмотрим наиболее типичные ситуации, возникающие при графических решениях задачи ЛП. На рис. 2, А) показано, что в угловой точке A целевая функция достигает максимального значения, а в точке B – минимального.
Рис. 2, Б) отражает случай, когда линия уровня параллельна отрезку AB ,
принадлежащему ОДР. Максимум целевой функции достигается в точке A , в
точке B ( Zmax
= Z ( A) = Z (B) ) и в любой точке отрезка AB . Поэтому оптималь-
ных решений будет бесконечное множество и все они описываются выпуклой комбинацией точек A и B :
X * = λ ( x1, A ; x2, A ) + (1 − λ )( x1,B ; x2,B ) = (λ x1, A + (1 − λ ) x1,B ; λ x2, A + (1 − λ ) x2,B ) ,
где 0 ≤ λ ≤ 1.
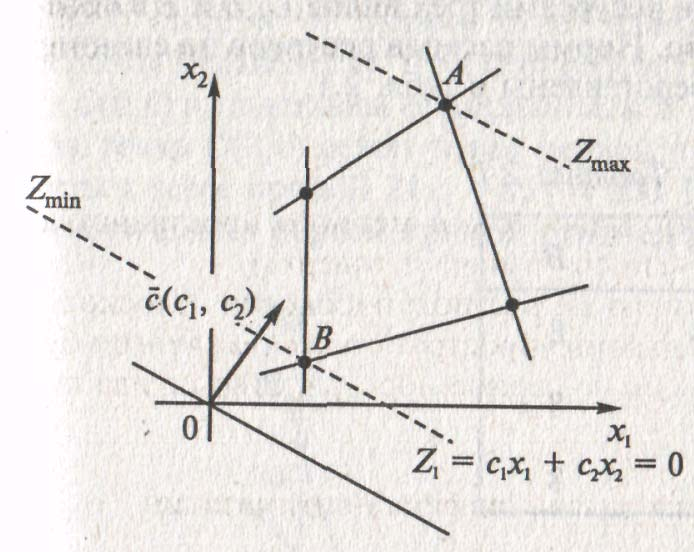
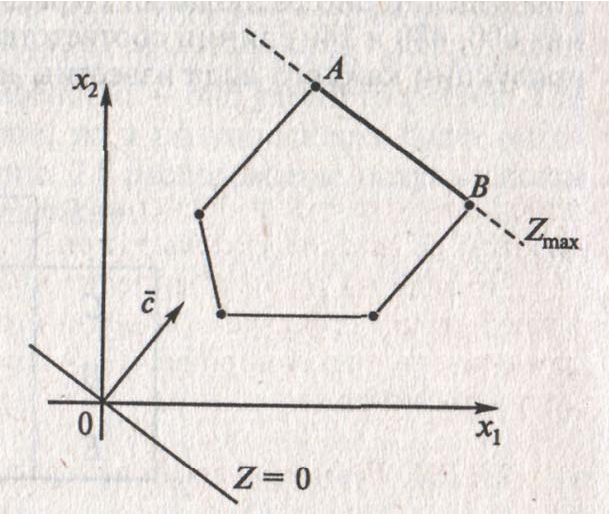
Рис. 2. Наличие графического решения задач ЛП
Напомним, что выпуклой линейной комбинацией произвольных n -
n
мерных векторов
X1 , X 2 ,..., X n
из пространства
R называется сумма
λ1 X1 + λ2 X 2 + ... + λn X n ,
n
где числа
λ j ≥ 0 ( j = 1, n ) и
∑ λ j
j =1
= 1.
Заметим, что в пространстве
R2 выполняется равенство λ + λ
= 1 . Обо-
значим вид
λ1 = λ , тогда
1 2
λ2 = 1 − λ . Поэтому выпуклая линейная комбинация имеет
λ X1 + (1 − λ ) X 2 ,
где 0 ≤ λ ≤ 1.
Принципиально другие ситуации рассмотрены на рис. 3. Так рис. 3, А)
изображает вариант, когда система ограничений образует неограниченное сверху множество. Функция Z при этом стремится к бесконечности. На рис. 3,
Б) представлен случай несовместной системы ограничений.
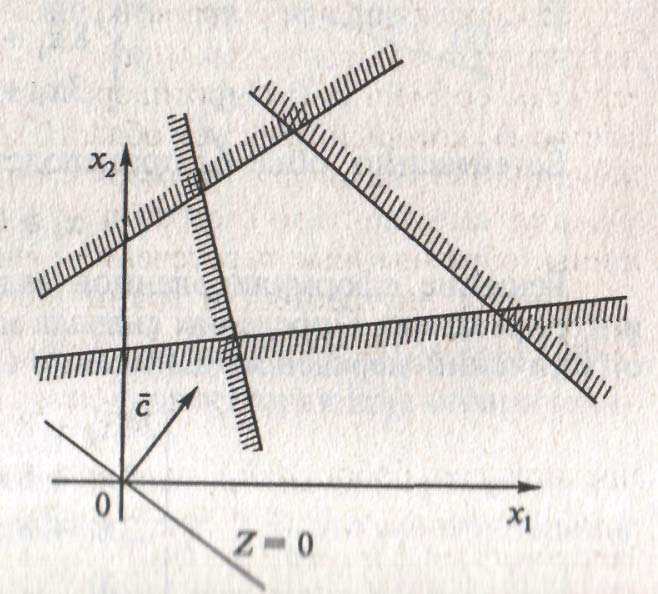
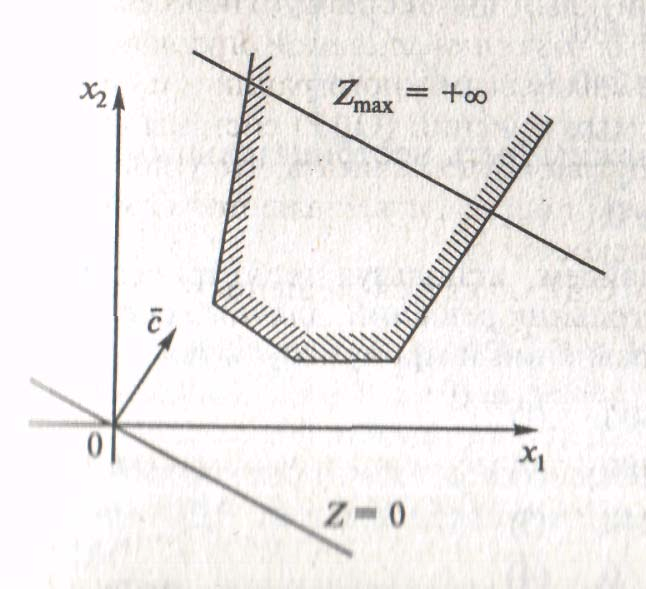
Рис. 3. Случаи отсутствия решения задач ЛП
Домашнее задание. Составить четыре конкретные задачи ЛП на мини-
мум, аналогичные ситуациям, рассмотренным на рис. 2 и 3.