

1.3. Інформаційні сигнали супутникових радіонавігаційних систем
Інформація з навігаційного супутника, прийнята апаратурою споживача являє собою кількісні значення певних параметрів, наприклад, координат, швидкості, прискорення, часу. Ця інформація передається в певному форматі, що представляє послідовності нулів й одиниць, якими модулюються електромагнітні коливання. Після демодуляції в апаратурах споживача передана інформація обробляється по спеціальних алгоритмах.
У повсякденній практиці ми звичайно маємо справу з десятковими числами. У технічних системах, зокрема, радіотехніці й цифровій техніці прийняті двійкові числа тобто 0 й 1. Це пов'язано з тим, що апаратно два стани реалізувати значно простіше. Наприклад, фазова модуляція, 0 й 180° має два стани, а далі можна вмовитися, що при фазі рівній нулю буде двійкова 1, а при фазі рівній 180°, двійковий 0.
Для одержання високої точності вимірів, підвищеної завадостійкості в супутникових радіонавігаційних системах використають шумоподібні фазоманіпулюючі сигнали.
Фазоманіпульований сигнал являє собою послідовність радіоімпульсів зі значеннями початкових фаз 0 й π.
У супутниковій навігаційній системі ГЛОНАСС для формування коду стандартної точності застосовується послідовність максимальної довжини або М-послідовність.
Послідовність максимальної довжини формується за допомогою лінійного n- розрядного регістра, що зрушує.
Кількість символів у послідовності дорівнює 2n-1 ( n- число розрядів регістра).
Період послідовності максимальної довжини Lmax =2n-1 тобто послідовність періодична й у кожному періоді однакова.
Властивості послідовності максимальної довжини:
У періоді послідовності число 0 й 1 відрізняється на 1, одиниць більше.
Властивість кореляції - нормована автокореляційна функція М - послідовності подібна цієї ж функції білого шуму при більших М и довжинах не кратних М.
Сума з модулем 2 двох зсунутих М - послідовностей є М - послідовністю.
М - послідовність є продуктом генерації псевдовипадкової послідовності.
Критерієм для визначення М - послідовності максимальної довжини служить неприводимість полінома виду
1+ Хm + Хn
і його первинність на полі Галуа.
У зазначеному поліномі показники ступеня n й m для М - послідовності максимальної довжини представлені в табл. 1.
Таблиця 1.
n |
3 |
4 |
5 |
6 |
7 |
9 |
10 |
11 |
15 |
17 |
18 |
20 |
12 |
m |
2 |
3 |
3 |
5 |
6 |
5 |
7 |
9 |
14 |
14 |
11 |
17 |
19 |
Lmax |
7 |
15 |
31 |
63 |
127 |
511 |
1023 |
2767 |
32767 |
131071 |
262143 |
1048575 |
2097151 |
Фазоманіпулюючі сигнали в супутникових навігаційних системах складаються з радіоімпульсів, початкові фази яких приймають значення 0 або π.
Між початковими фазами радіосигналу й значеннями елементів кодової послідовності вводиться відповідність, наприклад, початковій фазі радіосигналу рівної нулю ставиться у відповідність символ кодової послідовності «1»,а початковій фазі π (180)° - символ «-1».
Таблиця 2.
Послідовність максимальної довжини
А |
B |
C |
D |
Розряди регістра |
||
1 |
1 |
1 |
1 |
Початковий стан регістра |
|
|
0 |
1 |
1 |
1 |
1 |
1
П Е Р І О Д |
3
П Е Р І О Д И
С И М В О Л І В
П О С Л І Д О В Н О С Т І
|
0 |
0 |
1 |
1 |
1 |
||
0 |
0 |
0 |
1 |
1 |
||
1 |
0 |
0 |
0 |
1 |
||
0 |
1 |
0 |
0 |
0 |
||
0 |
0 |
1 |
0 |
0 |
||
1 |
0 |
0 |
1 |
0 |
||
1 |
1 |
0 |
0 |
1 |
||
0 |
1 |
1 |
0 |
0 |
||
1 |
0 |
1 |
1 |
0 |
||
0 |
1 |
0 |
1 |
1 |
||
1 |
0 |
1 |
0 |
1 |
||
1 |
1 |
0 |
1 |
0 |
||
1 |
1 |
1 |
0 |
1 |
||
1 |
1 |
1 |
1 |
0 |
||
0 |
1 |
1 |
1 |
1 |
2
П Е Р І О Д |
|
0 |
0 |
1 |
1 |
1 |
||
0 |
0 |
0 |
1 |
1 |
||
1 |
0 |
0 |
0 |
1 |
||
0 |
1 |
0 |
0 |
0 |
||
0 |
0 |
1 |
0 |
0 |
||
1 |
0 |
0 |
1 |
0 |
||
1 |
1 |
0 |
0 |
1 |
||
0 |
1 |
1 |
0 |
0 |
||
1 |
0 |
1 |
1 |
0 |
||
0 |
1 |
0 |
1 |
1 |
||
1 |
0 |
1 |
0 |
1 |
||
1 |
1 |
0 |
1 |
0 |
||
1 |
1 |
1 |
0 |
1 |
||
1 |
1 |
1 |
1 |
0 |
||
0 |
1 |
1 |
1 |
1 |
3
П Е Р І О Д |
|
0 |
0 |
1 |
1 |
1 |
||
0 |
0 |
0 |
1 |
1 |
||
1 |
0 |
0 |
0 |
1 |
||
0 |
1 |
0 |
0 |
0 |
||
0 |
0 |
1 |
0 |
0 |
||
1 |
0 |
0 |
1 |
0 |
||
1 |
1 |
0 |
0 |
1 |
||
0 |
1 |
1 |
0 |
0 |
||
1 |
0 |
1 |
1 |
0 |
||
0 |
1 |
0 |
1 |
1 |
||
1 |
0 |
1 |
0 |
1 |
||
1 |
1 |
0 |
1 |
0 |
||
1 |
1 |
1 |
0 |
1 |
||
1 |
1 |
1 |
1 |
0 |
||
а)
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
б)
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
Ліворуч наведені вибірки із трьох періодів послідовності зсуву на кілька символів
|
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
|
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
|
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
в)
Нехай фазоманіпульований сигнал має вигляд
U(t) = cos (ωt+ νπ) ( 1)
на інтервалі часу, у плині якого передається символ інформації π приймає значення0 або π.
Праву частину (1) можна розкласти
cos (ωt+ νπ) = cos (ωt)*cos(νπ) - sin (ωt)*sin (νπ) (2)
Якщо π = 0, то
cos (πt+ ππ) = 1*cos (πt),
якщо π = π , то
cos (πt+ ππ) = -1*cos (πt).
Або в загальному вигляді фазоманіпульований сигнал запишеться
U(t) = а*cos(πt),
де на час отримання у інформаційного імпульсу індекс "а" приймаєзначення “1” або “-1”.
Тепер приймемо цей сигнал за допомогою схеми змішувача. У змішувачі відбувається перемножування сигналів і фільтрація.
U(t)*Uопор(t)= а*cos(ωt)*cos (ωt+φon) = ½*а*cos ( ωt-ωt- φon)+½*а*cos(2ωt+φon) . (3)
У виразі . (3) другий доданок фільтрується, а частина, що залишилася, запишеться у вигляді:
а· cos (- φon) . (4)
На час дії імпульсу індекс "а" приймає значення “1” або “-1”.
Якщо φon під час детектування стабільна, то послідовність символів буде прийматися правильно, якщо ж φon одержить (стрибок) фази на ± π, то буде мати місце помилкове отримання послідовності символів.
Для зменшення цього явища застосовують отримання відносної фазової маніпуляції. Суть методу полягає в тому, що фаза відраховує не щодо початкової фази, тобто фази сигналу, коли почалося отримання послідовності інформаційних символів, а щодо фази попереднього імпульсу.
Реалізація цього методу здійснюється за допомогою перекодування вихідної послідовності інформаційних символів по наступному алгоритмі:
а вих π = а вх π + а вих π - 1, (5)
а вих π - 1+ а вих π = а вх π,( 6)
де:
а вх ί - вхідна послідовність символів при передачі [вираз (5)],
а вих ί - вихідна послідовність символів при отриманні [вираз (6)].
При отриманні послідовності символів застосовується алгоритм (6), у якому а вих ί є присутнім на вході отриманого пристрою, а а вх ί на виході.
Розглянемо приклад: нехай ми хочемо перекодувати п'ять символів при передачі.
Вхідна послідовність запишеться а вх. 1, а вх. 2, а вх3, а вх. 4, а вх. 5; вихідна а вих1, а вих2, а вих3, а вих4, а вих5.
Алгоритм (5)
а вих1 = а вх1 + а вих0
а вих2 = а вх2 + а вих1
а вих3 = а вх3 + а вих2
а вих4 = а вх4 + а вих3
а вих5 = а вх5 + а вих4
У числовому вигляді це виглядає так
а вх1 =1; а вих1 = 1+ 0 =1;
а вх2 =1; а вих2 = 1+ 1 =0;
а вх3 =1; а вих3 = 1+ 0 =1;
а вх4 =0; а вих4 = 0 + 1 =1;
а вх5 =1; а вих5 = 1+ 1 =0;
а вх. >1 1 1 0 1;
а вих. >1 0 1 1 0.
Зворотна процедура по алгоритму (6):
а вих π = а вх π + а вих π - 1,
а вих π - 1+ а вих π = а вх π,
а вих.0 + а вих1 = а вх1; а вх1 = 1+ 0=1;
а вих.1 + а вих2 = а вх2; а вх2 = 0+1=1;
а вих.2 + а вих3 = а вх3; а вх3 = 1+1=1;
а вих.3 + а вих4 = а вх4; а вх4 = 1+ 0=0;
а вих.4 + а вих5 = а вх5; а вх5 = 1.
Алгоритм (4.5) реалізується суматором з модулем 2 зі зворотним зв'язком рис. 7
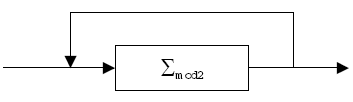
Рис. 7 Суматор з модулем 2 зі зворотним зв'язком
Алгоритм (4.6) реалізується суматором з модулем 2 (рис. 8)

Рис. 8. Суматор з модулем 2