

Розділ 2. Проектно-конструкторська розробка
2.1. Проектна розробка
Дитячий локатор складається з двох або більше пристроїв: базовий пристрій і до чотирьох дитячих пристроїв. Дитячий локатор використовує технологію універсальної системи GPS (Global Position System), щоб визначити місце розташування базового і дитячого пристроїв. Використання технології універсальної системи GPS дозволяє дитячому локаторові бути універсальною системою місцезнаходження дитячого пристрою. Вона може працювати в будь-якому середовищі світу. Щоб досягти необхідного діапазону, дитячий локатор використовує Прийомопередавачі розширеного спектра, що дають великий діапазон зв'язку. Прийомопередавачі працюють на частоті 2.4Ghz, де працює мало інших радіопристроїв. Це створює менше проблем для зв'язку з іншими пристроями, що використовують ту ж саму смугу частоти.
Дитячий локатор використовує універсальну систему GPS, для місцезнаходження базового і дитячого пристрою.
Як тільки базова довгота і координати широти визначені, дитячому пристроєві посилається сигнал, щоб обчислити відносну відстань і місце розташування від базового пристрою. Дитячий пристрій тоді посилає відстань і напрямок назад. Як тільки базовий пристрій одержує відстань дитячих пристроїв і напрямок, це відображається на дисплеї базового пристрою.
Якщо сигнал від дитячого пристрою не приймається, то базовий пристрій одержує сигнал «тривоги».
2.2 Системний oпис
2.2.1 Базовий пристрій
Ы
GPS-
сигнал
Рис 13.
Функціональна блок-схема Базового
пристрою
Функціональна блок-схема Базового пристрою зображена на рис.13. На якому показано комунікаційні зв'язки та напрямки потокові інформації в базовому пристрої.
- Антена і Прийомопередавач: ці блоки формують зв'язок між базовим модулем і дитячим модулем. Передача від базового пристрою до дитячих модулів складається з довготи базового пристрою і координати широти. У відповідь, дитячий модуль передає інформацію тривоги поряд з відстанню і напрямком від базового пристрою;
- Кнопка Тривоги: використовується для передачі сигналу тривоги в базовий пристрій. Стан тривоги зберігається і передається іншим дитячим пристроям;
- Кількість дитячих пристроїв: цей блок використовується базовим пристроєм для введення номеру дитячих пристроїв або для зміни їхньої кількості;
- GPS приймач перевіряє частоту сигналу, що аналізується для визначення своє власне місце розташування і точний час.
- Тривога: блок перевіряє дані, отримані від дитячих пристроїв через прийомо-передавач і перевіряє на сигнал «тривоги» . Стан тривоги дитячого пристрою приймається якщо: дитячий пристрій - поза діапазоном дії базового пристрою, або на дитячому пристрої натиснута власна кнопка тривоги.
- Аудіо Тривога: блок містить звуковий сигнал тривоги, щоб повідомити базовий пристрій, що дитячий пристрій у режимі тривоги.
- Цифровий Компас: цей блок містить компас, що постійно показує напрямок, у якому треба рухатися базовому пристроєві.
- Мікроконтролер базового пристрою аналізує інформацію від дитячого пристрою і за допомогою цифрового компасу визначає напрямок на ДП. Інформація про місце розташування дитячого пристрою відобразиться на Дисплеї базового пристрою. [11]
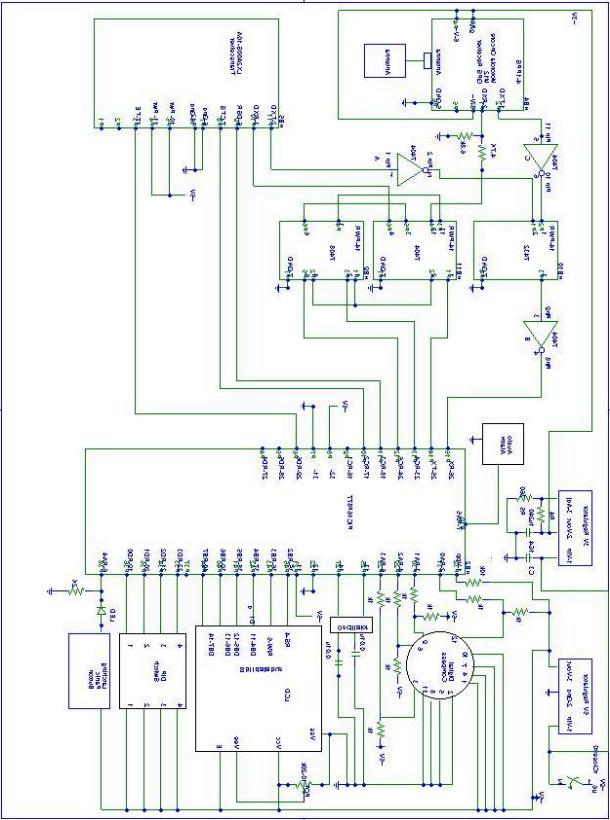
Рис. 14 Принципова схема базового пристрою
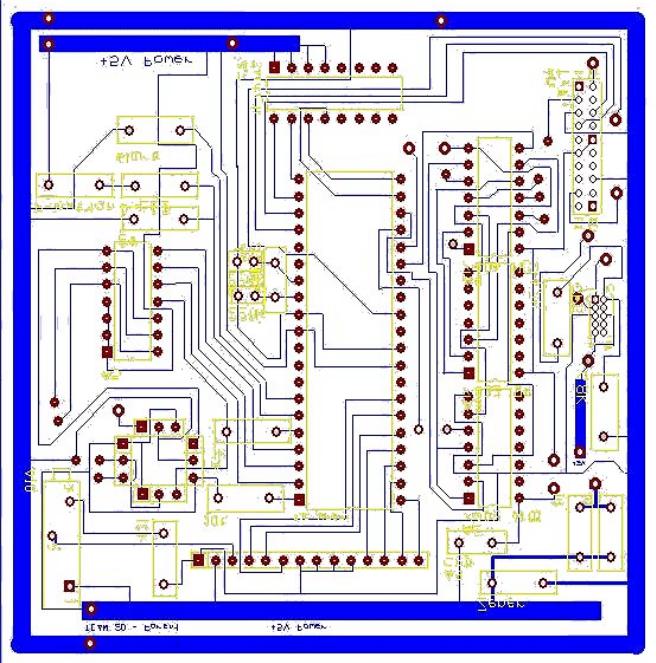
Рис. 15 Друкована плата для пристрою