

Розділ 1. Огляд літературних джерел
1.1. Глобальна Навігаційна Супутникова Система
1.1.1 Вступ
Глобальна Навігаційна Супутникова Система (ГЛОНАСС) - це сума унікальних технологій, плід багаторічної праці російських конструкторів і вчених. Вона складається з 24 супутників, що, знаходячись у заданих точках на високих орбітах, безупинно випромінюють убік Землі спеціальні навігаційні сигнали. Люба людина або транспортний засіб, оснащені спеціальним приладом для прийому й обробки цих сигналів, можуть з високою точністю в будь-якій точці Землі і навколоземного простору визначити власні координати і швидкість руху, а також здійснити прив'язку до точного часу. ГЛОНАСС є державною системою, що розроблялася як система подвійного використання, призначена для потреб Міністерства оборони і цивільних споживачів.
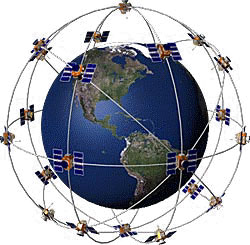
Рис1. Розміщення супутників у системі ГЛОНАСС
Перший запуск супутника по програмі ГЛОНАСС (Космос 1413) відбувся 12 жовтня 1982 року. Система ГЛОНАСС була офіційно прийнята в експлуатацію 24 вересня 1993 року.
1.1.2 Робота системи глонасс
Супутники системи ГЛОНАСС безупинно випромінюють навігаційні сигнали двох типів: навігаційний сигнал стандартної точності (СТ) у діапазоні L1 (1,6 Ггц) і навігаційний сигнал високої точності (ВТ) у діапазонах L1 і L2 (1,2 Ггц). Інформація, надана навігаційним сигналом СТ, доступна всім споживачам на постійній і глобальній основі і забезпечує, при використанні приймачів ГЛОНАСС можливість визначення:
горизонтальних координат з точністю 50-70 м (імовірність 99,7%);
вертикальних координат з точністю 70 м (імовірність 99,7%);
складового вектора швидкості з точністю 15 см/с (імовірність 99,7%)
точного часу з точністю 0,7 мкс (імовірність 99,7 %).
Ці точності можна значно поліпшити, якщо використовувати диференціальний метод навігації і додаткові спеціальні методи вимірів.
Сигнал ВТ призначений, в основному, для споживачів МО, і його несанкціоноване використання не рекомендується. Питання про надання сигналу ВТ цивільним споживачам знаходиться в стадії розгляду. [1]
Для визначення просторових координат і точного часу потрібно прийняти й обробити навігаційні сигнали не менш чим від 4-х супутників ГЛОНАСС. При прийомі навігаційних радіосигналів ГЛОНАСС приймач, використовуючи відомі радіотехнічні методи, вимірює дальності до видимих супутників і вимірює швидкості їхнього руху.
Одночасно з проведенням вимірів у приймачі виконується автоматична обробка міток часу, що знаходяться в кожному навігаційному радіосигналі, і цифровій інформації. Цифрова інформація описує положення даного супутника в просторі і часі щодо єдиної для системи шкали часу й у геоцентричній зв'язаній декартовій системі координат. Крім того, цифрова інформація описує положення інших супутників системи у вигляді кеплеровських елементів їхніх орбіт і містить деякі інші параметри. Результати вимірів і прийнята цифрова інформація є вихідними даними для рішення навігаційної задачі по визначенню координат і параметрів руху. Навігаційна задача вирішується автоматично в обчислювальному пристрої приймача, при цьому використовується відомий метод найменших квадратів. У результаті рішення визначаються три координати місця розташування споживача, швидкість його руху і здійснюється прив'язка шкали часу споживача до високоточної шкали Координованого всесвітнього часу (UTC).