

1.2.1 Принцип роботи navstar
Роботу системи NAVSTAR / GPS можна розбити на п'ять основних підпунктів:
Супутникова трилатерація - основа системи
Супутникова дальнометрія – вимір відстаней до супутників
Точна часова прив'язка – потрібно узгоджувати годинник у приймачі і на супутнику і для чого потрібно 4 космічних апарати
Розташування супутників – визначення точного положення супутників у космосі
Корекція помилок – облік помилок внесених затримками в тропосфері й іоносфері [3]
1.2.1.1 Супутникова трилатерація
Точні координати можуть бути обчислені для місця на поверхні Землі по вимірах відстаней від групи супутників (якщо їхнє положення в космосі відомо). У цьому випадку супутники є пунктами з відомими координатами. Припустимо, що відстань від одного супутника відомо і ми можемо описати сферу заданого радіуса довкола нього.
Якщо ми знаємо також відстань і до другого супутника, то знаходження місця розташування буде розташовано десь у колі, що задається перетинанням двох сфер.
Третій супутник визначає дві точки на колі.
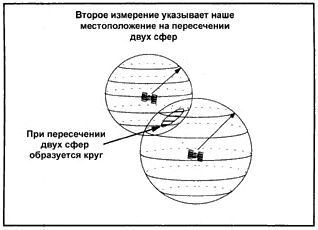
Рис.2
Тепер залишається тільки вибрати правильну точку. Однак одна з точок завжди може бути відкинута, тому що вона має високу швидкість переміщення або знаходиться на або під поверхнею Землі. Таким чином, знаючи відстань до трьох супутників, можна обчислити координати точки, яку ми визначаємо.
1.2.1.2 Супутникова дальнометрія
Відстань до супутників визначається по вимірах часу проходження радіосигналу від космічного апарата до приймача помноженим на швидкість світла. Для того, щоб визначити час поширення сигналу нам необхідно знати коли він залишив супутник.
Для цього на супутнику й у приймачі одночасно генерується однаковий Псевдовипадковий Код ( Кожен супутник GPS передає два радіосигнали: на частоті L1=1575.42 Мгц і L2=1227.60 Мгц. Сигнал L1 має два далекомірних коди з Псевдовипадковим шумом (PRN), P-код і C/A код. “Точний” або P-код може бути зашифрований для військових цілей. “Грубий” або C/A код не зашифрований. Сигнал L2 модулюється тільки з P-кодом. Більшість цивільних користувачів використовують C/A код при роботі з GPS системами. Деякі приймачі геодезичного класу працюють з P-кодом[4]).
Приймач перевіряє вхідний сигнал із супутника і визначає коли він генерував такий же код. Отримана різниця, помножена на швидкість світла (~ 300000 км/с) дає шукана відстань.
Використання коду дозволяє приймачеві визначити тимчасову затримку в будь-який час. Крім того, супутники можуть випромінювати сигнал на одній і тій же частоті, тому що кожен супутник ідентифікується по своєму Псевдовипадковому коду.
1.2.1.3 Точна часова прив'язка
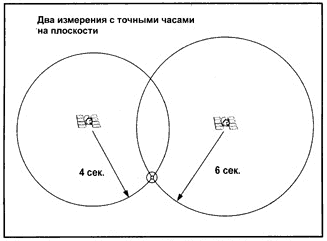
Рис.3
Як видно зі сказаного вище, обчислення прямо залежать від точності ходу годинника. Код повинний генеруватися на супутнику і приймачі в той самий час. На супутниках встановлений атомний годинник, що має точність біля однієї наносекунди. Однак це занадто дорого, щоб установлювати такий годинник у кожен GPS приймач, тому виміру від четвертого супутника використовуються для усунення помилок ходу годинника приймача.
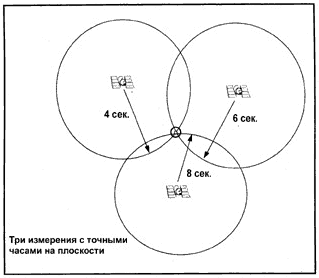
Ці виміри можна використовувати для усунення помилок, що виникають якщо годинник на супутнику й у приймачі не синхронізовані. Для наочності, ілюстрації приведені нижче розглядають ситуацію на площині, тому що тільки три супутники необхідно для обчислення місця розташування об'єкта.
Якщо годинник на супутнику й у приймачі мають однакову точність ходу, то точне місце розташування може бути знайдене по вимірах відстані до двох супутників.
Якщо отримані виміри з трьох супутників, то коло описане радіусом-вектором від третього супутника буде перетинатися як показано на малюнку.
Однак, якщо годинник у приймачі поспішає на 1 секунду, то картина буде виглядати в такий спосіб.
Якщо зробити вимір до третього супутника, то отриманий радіус-вектор не перетнеться з двома іншими як показане на малюнку.
Рис.5
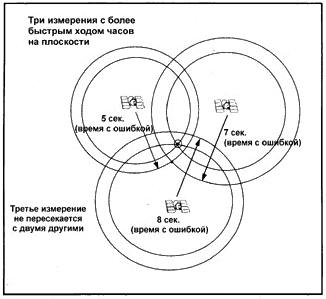
Коли GPS приймач одержує серію вимірів які не перетинаються в одній точці, то комп'ютер у приймачі починає віднімати (або додавати) час методом послідовні ітерації доти, поки не зведе усі виміри до однієї точки. Після цього обчислюється виправлення і робиться відповідна коректура.
Якщо вам потрібно третій вимір, то необхідно четвертого супутника для усунення помилок ходу годинника у приймачі. Таким чином, при роботі необхідно мати мінімум чотири супутники, щоб визначити тривимірні координати об'єкта.