

17) Потенциальная энергия.
Потенциальная энергия - энергия, определяемая взаимным расположением тел или отдельных частей тела относительно друг друга.Когда меняется конфигурация системы тел или частиц одного тела относительно друг друга, должна совершаться работа.Пространство, в каждой точке которого на тело действует определенная сила, называется физическим или силовым полем.Поэтому когда тело перемещается вблизи Земли, то говорят, что тело двигается в силовом поле тяготения Земли или в потенциальном поле Земли. Потенциальная энергия тяготения равна (Wпот)тяг. = mgh, h - расстояние между телом и Землей.В растянутой (или сжатой) пружине на каждую ее точку действует сила упругости, в этом случае можно говорить о потенциальном поле упругости. Потенциальная энергия упругости равна (Wпот)упр. = (kl2)/2, l - длина растянутой пружины, отсчет х от положения равновесия.При делении сил, действующих на тело, на внешние и внутренние рассмотренные в примерах сила тяготения (в системе "тело - Земля") и сила упругости растянутой (сжатой) пружины можно отнести к внутренним силам. Поэтому верно утверждение, что каждой конфигурации произвольной системы частиц присуща своя собственная потенциальная энергия, и работа всех внутренних потенциальных сил, приводящая к изменению этой конфигурации, равна взятому со знаком минус приращению (убыли) потенциальной энергии системы.
В физике работа неразрывно связана с изменением состояния тела или системы. Это изменение может выражаться самым различным образом: а) тело приобретает другую скорость, б) тело поднимается на другой уровень, в) тело деформируется, г) тело заряжается, д) тела намагничивается и т.д. Состояние механической системы (или тела) характеризуется одновременным заданием координат и скоростей всех точек системы (или тела) и может изменяться в процессе движения.
Процесс изменения характера движения тела происходит при его силовом взаимодействии с другими телами. Для количественного описания процесса вводят понятия силы и работы, совершаемой силой.
Если на тело действует постоянная сила F (Рисунок 13), и это приводит к перемещению ∆r тела, то элементарной работой ∆А постоянной силы называется скалярное произведение вектора силы F и вектора перемещения ∆r:
∆А = (F∙∆r) = ½F½½∆r½cos a ,
где a - угол между направлениями векторов силы F и перемещения ∆r, (F∙∆r) – скалярное произведение двух векторов (см.[8]).
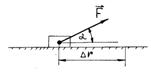
Рисунок 13 - Перемещение тела под действием постоянной силы.
Работа ∆А - скаляр. Если угол a - острый, то ∆А положительная величина, и говорят, что сила совершает работу. Если угол a - тупой, то ∆А - отрицательная величина, и говорят, что работа совершается против действия силы. Если a = 900, т.е. направления силы и перемещения взаимно перпендикулярны, то такая сила работы не совершает ∆А = 0. Такая сила не может изменить величину скорости тела, но она меняет направление скорости.
18) Сила как мера взаимодействия тел. Момент силы, работа и мощность силы
Момент силы, величина, характеризующая вращательный эффект силы при действии её на твёрдое тело; является одним из основных понятий механики. Различают М. с. относительно центра (точки) и относительно оси.
М. с. относительно центра О величина векторная. Его модуль Mo = Fh, где F — модуль силы, a h — плечо, т. е. длина перпендикуляра, опущенного из О на линию действия силы (см. рис.); направлен вектор Mo перпендикулярно плоскости, проходящей через центр О и силу, в сторону, откуда поворот, совершаемый силой, виден против хода часовой стрелки (в правой системе координат). С помощью векторного произведения М. с. выражается равенством Mo = [rF], где r — радиус-вектор, проведённый из О в точку приложения силы. Размерность М. с. — L2MT2, единицы измерения — н×м, дин×см (1 н×м = 107 дин×см) или кгс×м.
М. с. относительно оси величина алгебраическая, равная проекции на эту ось М. с. относительно любой точки О оси или же численной величине момента проекции Рху силы F на плоскость ху, перпендикулярную оси z, взятого относительно точки пересечения оси с плоскостью. Т. е.
Mz = Mo cos g = ± Fxy h1.
Знак плюс в последнем выражении берётся, когда поворот силы F с положительного конца оси z виден против хода часовой стрелки (тоже в правой системе). М. с. относительно осей x, y, z могут также вычисляться по формулам:
Mx = yFz — zFy, My = zFx — xFz, Mz = xFy — yFx,
где Fx, Fy, Fz — проекции силы F на оси; х, у, z — координаты точки А приложения силы.
Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины и направления силы (сил) и от перемещения точки (точек) тела или системы. Рассмотрим несколько детальнее, чем это было сделано выше, построение определения энергии как риманова интеграла.
Пусть
материальная точка M
движется по непрерывно дифференцируемой
кривой G
= {r
= r(s)},
где s — переменная длина дуги,![]() и на неё действует сила
F(s),
направленная по касательной к траектории
в направлении движения (если сила не
направлена по касательной, то будем
понимать под F(s)
проекцию силы на положительную касательную
кривой, таким образом сведя и этот случай
к рассматриваемому далее). Величина
и на неё действует сила
F(s),
направленная по касательной к траектории
в направлении движения (если сила не
направлена по касательной, то будем
понимать под F(s)
проекцию силы на положительную касательную
кривой, таким образом сведя и этот случай
к рассматриваемому далее). Величина
![]() ,
называется элементарной
работой
силы
F
на участке Gi
и принимается за приближенное значение
работы, которую производит сила F,
воздействующая на материальную точку,
когда последняя проходит кривую Gi.
Сумма всех элементарных работ
,
называется элементарной
работой
силы
F
на участке Gi
и принимается за приближенное значение
работы, которую производит сила F,
воздействующая на материальную точку,
когда последняя проходит кривую Gi.
Сумма всех элементарных работ
 является
интегральной суммой Римана функции
F(s).
является
интегральной суммой Римана функции
F(s).
В соответствии с определением интеграла Римана, можем дать определений работе:
Предел, к которому стремится сумма всех элементарных работ, когда мелкость | τ | разбиения τ стремится к нулю, называется работой силы F вдоль кривой G.
Таким образом, если обозначить эту работу буквой W, то, в силу данного определения,
 ,
,
следовательно,
 (1).
(1).
Если
положение точки на траектории её движения
описывается с помощью какого-либо
другого параметра t
(например, времени) и если величина
пройденного пути s
= s(t),
![]() является
непрерывно дифференцируемой функцией,
то из формулы (1) получим
является
непрерывно дифференцируемой функцией,
то из формулы (1) получим

Мо́щность — физическая величина, равная отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени. Если на движущееся тело действует сила, то эта сила совершает работу. Мощность в этом случае равна скалярному произведению вектора силы на вектор скорости, с которой движется тело:
|
|
F — сила, v — скорость, α — угол между вектором скорости и силы.
Частный случай мощности при вращательном движении:
|
|
M —
момент силы,
![]() —
угловая скорость
—
угловая скорость