

9) Свободное затухающее колебание пружинного маятника
1.
Свободные
затухающие колебания пружинного
маятника.
Для пружинного маятника массой m, который
совершает малые колебания под действием
упругой силы F= -kx, сила трения прямо
пропорциональна скорости, т. е.
![]() где
r — коэффициент
сопротивления;
знак минус говорит о том, что сила трения
и скорость противоположно направлены.
При этих условиях закон движения
маятника
где
r — коэффициент
сопротивления;
знак минус говорит о том, что сила трения
и скорость противоположно направлены.
При этих условиях закон движения
маятника
![]() (9)
Используя формулу
(9)
Используя формулу
![]() и
считая, что коэффициент затухания равен
и
считая, что коэффициент затухания равен
![]() (10)
получим полностью идентичное
уравнению (1) дифференциальное уравнение
затухающих колебаний маятника:
(10)
получим полностью идентичное
уравнению (1) дифференциальное уравнение
затухающих колебаний маятника:
![]() Из
выражений (1) и (5) следует, что колебания
маятника удовлетворяют уравнению
Из
выражений (1) и (5) следует, что колебания
маятника удовлетворяют уравнению
![]() где
частота
где
частота
![]() (см.
(4)).
Добротность пружинного
маятника, используя (8) и (10),
(см.
(4)).
Добротность пружинного
маятника, используя (8) и (10),
![]() .
.
10) Характеристики затухающих колебаний: коэффициент затухания, время релаксации, логарифмический декремент, добротность
Дифференциальное уравнение свободных затухающих колебаний линейной системы определяется как (1) где s – колеблющаяся величина, которая описывает тот или иной физический процесс, δ = const — коэффициент затухания, ω0 - циклическая частота свободных незатухающих колебаний той же колебательной системы, т. е. при δ=0 (при отсутствии потерь энергии) называется собственной частотой колебательной системы. Промежуток времени τ = 1/σ, в течение которого амплитуда затухающих колебаний становится меньше в е раз, называется временем релаксации. Если A(t) и А(t + Т) — амплитуды двух последовательных колебаний, соответствующих моментам времени, которые отличаются на период, то отношение называется декрементом затухания, а его логарифм (7) — логарифмическим декрементом затухания; Ne — число колебаний, которые совершаются за время уменьшения амплитуды в е раз. Логарифмический декремент затухания является постоянной величиной для данной колебательной системы. Для характеристики колебательной системы также применяют понятие добротности Q, которая при малых значениях логарифмического декремента будет равна (8) (так как затухание мало (ω02 >> σ2 ), то T принято равным Т0). Из формулы (8) вытекает, что добротность пропорциональна числу колебаний Ne, которые система совершает за время релаксации. Выводы и уравнения, полученные для свободных затухающих колебаний линейных систем, можно использовать для колебаний различной физической природы — механических (в качестве примера возьмем пружинный маятник) и электромагнитных (в качестве примера возьмем электрический колебательный контур).
11) Сложение коллинеарных гармонических колебаний равных частот
Сложение однонаправленных колебаний одинаковой частоты
Задача сложения нескольких колебаний может возникнуть, например, в оптике, где световые колебания (колебания вектора напряженности электрического поля) в некоторой точке определяются как результат наложения многих колебаний, приходящих в данную точку от различных участков волнового фронта.
Под сложением колебаний понимают нахождение результирующих колебаний системы в тех случаях, когда эта система одновременно участвует в нескольких колебательных процессах. Различают два предельных случая:
· сложение колебаний одинакового направления;
· сложение взаимно перпендикулярных колебаний.
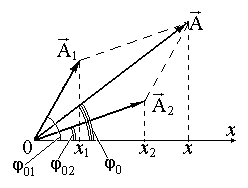
Рассмотрим первый случай – сложение двух гармонических колебаний одинакового направления и частоты. Для сложения колебаний удобно применять метод векторных диаграмм. Суть этого метода в том, что гармоническое колебание представляется при помощи вектора, длина которого равна амплитуде колебания, а направление вектора образует с осью OX угол, равный фазе колебания. Амплитуда и начальная фаза результирующего колебания определяются при помощи векторного сложения. Допустим, что требуется сложить два гармонических колебания:
![]() и
и
![]() . (6.4.1)
. (6.4.1)
С
|
ложим соответствующие им векторы
Этот
вектор в плоскости диаграммы вращается
с той же частотой
![]() ,
с которой колеблются складываемые
осциллирующие функции x1(t)
и x2(t).
Результирующая амплитуда
,
с которой колеблются складываемые
осциллирующие функции x1(t)
и x2(t).
Результирующая амплитуда
![]() и начальная фаза
и начальная фаза
![]() находятся геометрическим построением
для момента времени t=0:
находятся геометрическим построением
для момента времени t=0:
![]() (6.4.2)
(6.4.2)
 . (6.4.3)
. (6.4.3)
Выделим три характерных случая.
Если
разность начальных фаз
![]() обоих колебаний равна 0 или 2n,
где n=1,2,…. то колебания находятся в фазе
и амплитуда результирующего колебания
равна сумме амплитуд складываемых
колебаний,
обоих колебаний равна 0 или 2n,
где n=1,2,…. то колебания находятся в фазе
и амплитуда результирующего колебания
равна сумме амплитуд складываемых
колебаний,
![]() .
.
Если
разность фаз
![]() ,
т.е. оба колебания находятся в противофазе,
то
,
т.е. оба колебания находятся в противофазе,
то
![]() (при
(при![]() наблюдается полное гашение колебаний).
наблюдается полное гашение колебаний).
Если частоты складываемых колебаний не одинаковы, то результирующий вектор пульсирует по величине и вращается с непостоянной скоростью. В этом случае результирующее колебание не будет гармоническим и описывается другими более сложными зависимостями.