

Цифрові системи керування електроприводами
16.1. Структура електропривода з цифровою системою
Керування
Цифрові
системи керування (ЦСК) за структурою
аналогічні без-перервним (аналоговим)
системам. Різниця лише у тому, що
анало-гові елементи замінені цифровими.
На рис. 16.1 наведено схему ЦСК електроприводом
з вихідною координатою
![]() ,
в якості якої може бути швидкість чи
кут повороту. Вона складається з
цифрово-го задаючого пристрою (ЦЗП),
цифрового суматора (ЦС) і цифрово-го
регулятора (ЦР). Заглавними буквами
позначені багаторозрядні цифрові
сигнали.
,
в якості якої може бути швидкість чи
кут повороту. Вона складається з
цифрово-го задаючого пристрою (ЦЗП),
цифрового суматора (ЦС) і цифрово-го
регулятора (ЦР). Заглавними буквами
позначені багаторозрядні цифрові
сигнали.
Силова частина електропривода – керований перетворювач
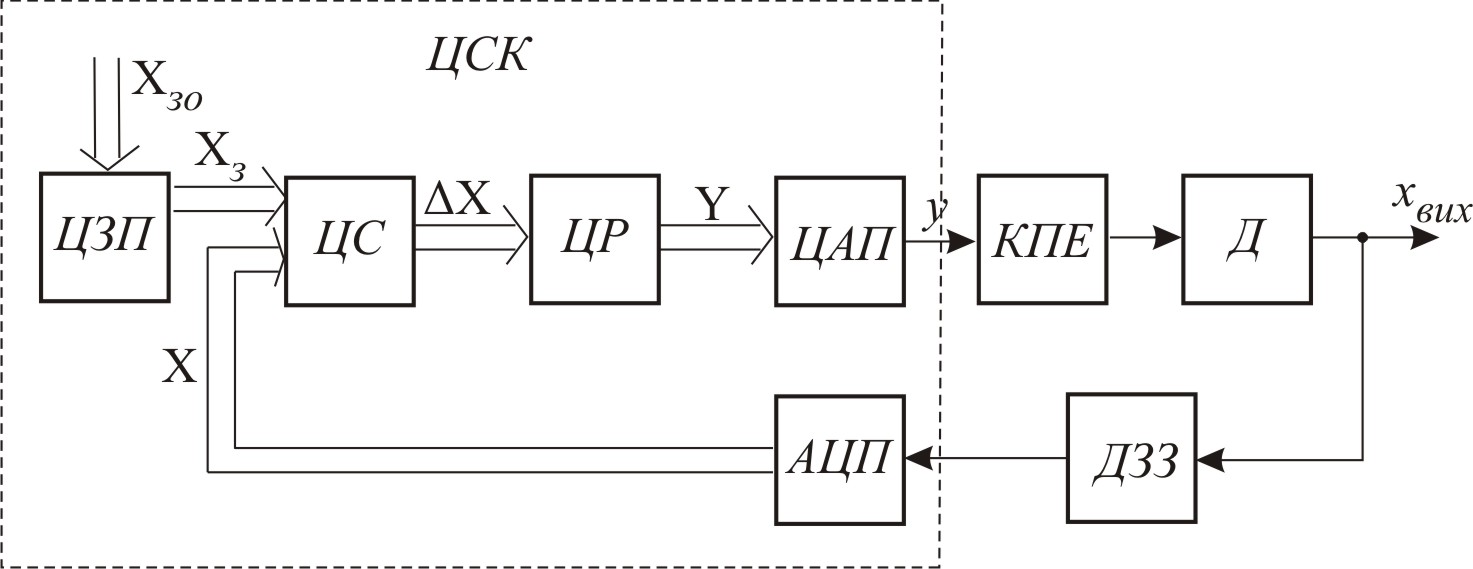
Рис. 16.1. Функціональна схема електропривода з ЦСК
енергії (КПЕ) і двигун (Д), є аналоговою. Для узгодження роботи ЦСК з аналоговою частиною використовуються цифро-аналоговий (ЦАП) і аналого-цифровий (АЦП) перетворювачі. Давач зворотного зв’язку (ДЗЗ) може бути як аналоговий, так і дискретним зі сталим числом імпульсів на один оберт.
До
недавнього часу всі функціональні
складові ЦСК реалізовува-лись апаратно,
тобто кожна складова представляла собою
окремий блок, виконаний з мікросхем
малого і середнього ступеня інтегра-ції.
Недоліком такого виконання ЦСК є те, що
зміна алгоритма ке-рування вимагала
заміни відповідних блоків. Тому в даний
час всі функціоналі складові, включаючи
ЦАП і АЦП, реалізуються про-грамно на
базі програмованого логічного контролера
(ПЛК). За та-кої реалізації зміна алгоритму
керування зводиться лише до зміни
програми роботи ПЛК. При цьому всі
функції ЦСК – формування задаючого
сигналу
![]() ,
порівняння з сигналом зворотного зв’язку
,
порівняння з сигналом зворотного зв’язку
![]() ,
обчислення
,
обчислення
![]() і визначення алгоритму керування
і визначення алгоритму керування
![]() – після попереднього задання початкових
умов
– після попереднього задання початкових
умов
![]() виконують-ся
розрахунково за програмним циклом ПЛК,
який займає інтервал часу
виконують-ся
розрахунково за програмним циклом ПЛК,
який займає інтервал часу
![]() .
В цей цикловий період входять час
зчитування показів да-вачів, розрахунок
алгоритму і реалізація сигналу керування.
.
В цей цикловий період входять час
зчитування показів да-вачів, розрахунок
алгоритму і реалізація сигналу керування.
Керування
перетворювачами енергії (керовані
випрямлячі, ши-ротно-імпульсні та
частотні перетворювачі) є дискретним
з часовим інтервалом дискретності
![]() .
Їх робота повинна бути синхронізова-на
з роботою ЦСК. Якщо величини
і
кратні і між передніми фронтами початкових
імпульсів немає часового зсуву
.
Їх робота повинна бути синхронізова-на
з роботою ЦСК. Якщо величини
і
кратні і між передніми фронтами початкових
імпульсів немає часового зсуву
![]() ,
то за-мість двох періодів дискретності
приймають один з періодом
,
то за-мість двох періодів дискретності
приймають один з періодом
![]() .
(16.1)
.
(16.1)
В
процесі роботи ЦСК навіть за умови
збереження синхронізму синфазність
квантування із-за дії випадкових впливів
може порушу-ватись, зумовлюючи додаткове
чисте запізнення
![]() ,
яке буде змі-нюватись в межах
,
яке буде змі-нюватись в межах
![]() .
(16.2)
.
(16.2)
Якщо
![]() ,
що має місце при використанні ПЛК,
максималь-не запізнення
,
що має місце при використанні ПЛК,
максималь-не запізнення
![]() .
Оскільки визначити величину
до-сить складно, то при аналізі і синтезі
ЦСК електроприводом з вра-хуванням
електромагнітних і електромеханічної
сталих часу аналогової частини чисте
запізнення приймають
.
Оскільки визначити величину
до-сить складно, то при аналізі і синтезі
ЦСК електроприводом з вра-хуванням
електромагнітних і електромеханічної
сталих часу аналогової частини чисте
запізнення приймають
![]() або
або
![]() .
.
16.2. Розрахункові моделі ацп і цап
Окрім чистого запізнення для ЦСК є характерним перетворення цифрових змінних з кінцевим числом розрядів у аналогові і навпаки – аналогових змінних у цифрові, за допомогою ЦАП і АЦП. Це перетворення є дискретним за рівнем і може суттєво впливати на статичні і динамічні характеристики електропривода. Тому необхідно вміти оцінювати вплив від дискретності. Розглянемо цей вплив на прикладі АЦП.
В АЦП квантованість за рівнем виражається в багатоступінчас-тості характеристики “вхід – вихід” – (рис. 16.2,а).
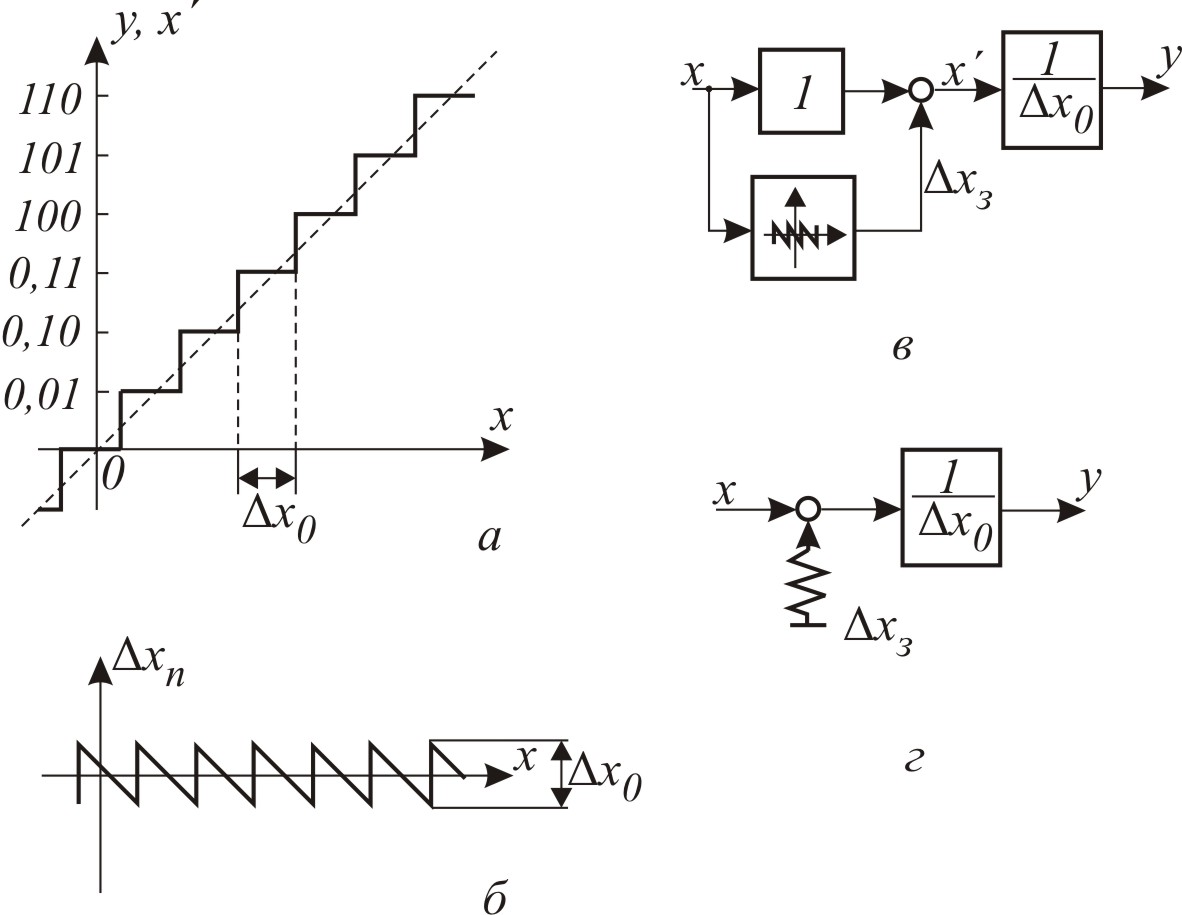
Рис.
16.2. Характеристики
(а), завади
![]() (б), повна (в) і спрощена (г) розрахункові
моделі АЦП
(б), повна (в) і спрощена (г) розрахункові
моделі АЦП
За
такої характеристики передаточний
коефіцієнт АЦП, як відно-шення одиниці
вихідної величини (1) до одиниці вхідної
величини
![]()
![]() ,
(16.3)
,
(16.3)
визначає усереднену вихідну змінну (пунктирна лінія на рис. 16.2,а)
![]() .
(16.4)
.
(16.4)
Замінивши
вихідну змінну
![]() у масштабі вхідної змінної
у масштабі вхідної змінної
![]() ,
оде-ржимо різницю
,
оде-ржимо різницю
![]() ,
(16.5)
,
(16.5)
яка
визначає заваду від квантування за
рівнем у виді періодичної функції від
з амплітудою
![]() (рис. 16.2,б). З врахуванням (16.5) розрахункова
модель АЦП матиме вигляд, представлений
рис.16.2,в.
(рис. 16.2,б). З врахуванням (16.5) розрахункова
модель АЦП матиме вигляд, представлений
рис.16.2,в.
Середній квадрат похибки від квантування буде дорівнювати дисперсії похибки
 .
(16.6)
.
(16.6)
За
інтегральної оцінки впливу завади
квантування розрахункова модель
спрощується (рис. 16.2,г) і АЦП можна
представити ліній-ною ланкою, на вході
якої будуть діяти корисний сигнал
і завада
![]() типу “білого шуму” з рівноймовірнисними
значеннями в ме-жах
типу “білого шуму” з рівноймовірнисними
значеннями в ме-жах
![]() ,
кореляційною функцією
,
кореляційною функцією
![]() ,
(16.7)
,
(16.7)
де – дельта-функція, та спектральною густиною, рівною дис-персії завади
![]() .
(16.8)
.
(16.8)
За такого представлення АЦП вплив завади від квантування сиг-налу можна врахувати інтегральною оцінкою похибки регулювання вихідної змінної електропривода
 ,
(16.9)
,
(16.9)
де
![]() – модуль передавальної функції системи
регулювання по каналу завади квантування,
рівний
– модуль передавальної функції системи
регулювання по каналу завади квантування,
рівний
![]() .
.
Якщо прийняти АЦП як лінійну ланку згідно (16.4), то вплив квантування не буде враховуватись у перетворенні аналогового сиг-налу у цифровий.
Все
викладене стосовно АЦП стосується і
ЦАП з тою різницею, що вхідним сигналом
ЦАП буде безрозмірна цифрова змінна
![]() ,
а вихідною – розмірна квантована за
рівнем змінна
і
,
а вихідною – розмірна квантована за
рівнем змінна
і
![]() ,
(16.10)
,
(16.10)
де
![]() – передавальний коефіцієнт, а
– передавальний коефіцієнт, а
![]() – дискретна оди-ниця вихідної змінної
ЦАП.
– дискретна оди-ниця вихідної змінної
ЦАП.
Якщо
задана похибка регулювання вихідної
змінної електропри-вода
![]() ,
то вибір розрахункової моделі можна
обґрунтувати за величиною похибки
,
то вибір розрахункової моделі можна
обґрунтувати за величиною похибки
![]() вихідної змінної
,
зумовленою дією за-вади
вихідної змінної
,
зумовленою дією за-вади
![]() ,
а саме:
,
а саме:
якщо
![]() ,
то квантування не враховується;
,
то квантування не враховується;
якщо
![]() ,
то квантування враховується повністю
(розрахункова модель на рис. 16.2,в);
,
то квантування враховується повністю
(розрахункова модель на рис. 16.2,в);
якщо
![]() ,
то квантування враховується інтегрально
(розрахункова модель на рис. 16.2,г).
,
то квантування враховується інтегрально
(розрахункова модель на рис. 16.2,г).
В
цих умовах згідно (16.9)
 .
.