

3.5. Частотні характеристики
Їх
утримують підстановкою
![]() у вирази передавальних функцій.
Передавальна функція двигуна за керуючим
впливом згідно (3.22)
у вирази передавальних функцій.
Передавальна функція двигуна за керуючим
впливом згідно (3.22)
![]() .
(3.29)
.
(3.29)
Передавальна функція за збуренням
 .
(3.30)
.
(3.30)
Передавальній функції (3.29) відповідає амплітудно-фазова частотна характеристика
 .(3.31)
.(3.31)
З (3.31) знаходять амплітудночастотну
(3.32)
і фазочастотну
![]() (3.33)
(3.33)
характеристики.
З
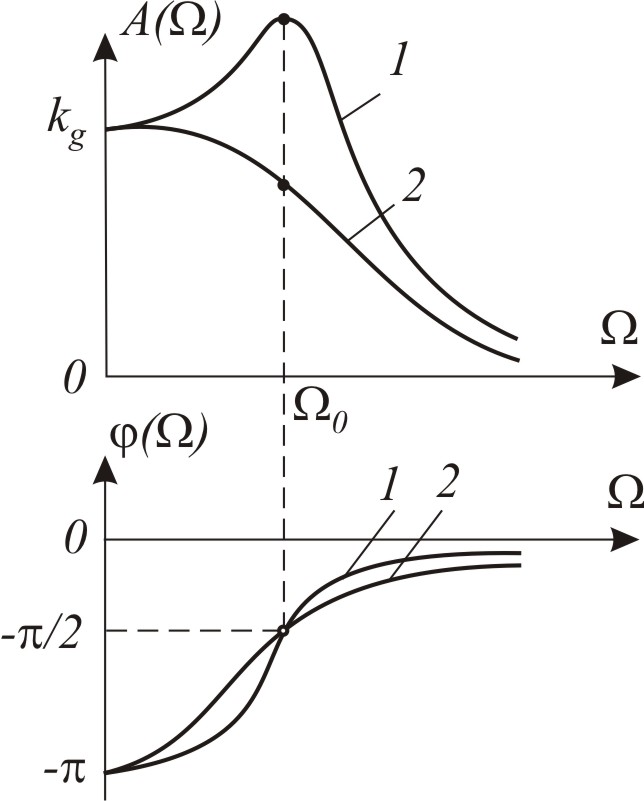
Рис.3.17.
Частотні
характеристики двигуна постійного
струму незалежного збудження при зміні
напруги![]()
![]() .
При
.
При
![]()
![]() характеристика
досягає максимального значення у випадку
згасаючого перехідного процесу (крива
1 на рис.3.17). Для аперіодичного процесу
амплітуда коливань зі зростанням частоти
зменшується (крива 2 на рис.3.17).
характеристика
досягає максимального значення у випадку
згасаючого перехідного процесу (крива
1 на рис.3.17). Для аперіодичного процесу
амплітуда коливань зі зростанням частоти
зменшується (крива 2 на рис.3.17).
Залежність
(3.33) показує, що при
![]() ,
а при
,
а при
![]() .
При цьому через точку
.
При цьому через точку
![]() проходять фазо-частотні характеристики
для різних видів коренів характеристичного
рівняння.
проходять фазо-частотні характеристики
для різних видів коренів характеристичного
рівняння.
Контрольні запитання і задачі
1. Чому механічні характеристики двигуна постійного струму незалежного збудження при зміні напруги живлення будуть парале-льними?
2. За якою формулою визначають коефіцієнт передачі двигуна постійного струму незалежного збудження?
3.
Визначити
коефіцієнт передачі двигуна постійного
струму незалежного збудження, якщо
![]() ,
,
![]() ,
,
![]()
![]() і
і
![]() .
.
4. Яким способом треба регулювати кутову швидкість двигуна постійного струму незалежного збудження, щоби його потуж-ність не змінювалась?
5. Які характеристики використовують для побудови натураль-ної механічної характеристики двигуна постійного струму послідов-ного збудження?
6. Як здійснюють динамічне гальмування двигуна постійного струму послідовного збудження?
7. Що відбудеться з двигуном постійного струму послідовного збудження, якщо змінити полярність напруги живлення?
8. Від чого залежить вид перехідного процесу у двигуні постій-ного струму незалежного збудження?
9. За якої умови в двигуні постійного струму незалежного збудження виникає згасаючий коливальний перехідний процес?
10. Від яких параметрів залежить частота власних коливань двигуна постійного струму незалежного збудження?
Розділ 4
Перетворювачі напруги електроприводів постійного струму
4.1. Тиристорні керовані випрямлячі
Для живлення якірних кіл і кіл обмоток збудження в сучасних електроприводах постійного струму використовують керовані вип-рямлячі (КВ), які часто називають тиристорними перетворювача-ми. Вони перетворюють напругу змінного струму у регульовану напругу постійного струму. При цьому вони можуть працювати в режимі випрямляння і в режимі інвертування, перетворюючи напругу постійного струму у змінну.
Основними перевагами випрямлячів є високі коефіцієнти підси-лення і ККД, мала потужність керування і висока швидкодія. Недо-ліки: пульсація напруги постійного струму, низький коефіцієнт по-тужності при низькій напрузі постійного струму, висока чутливість до перенапруги, викривлення в мережі живлення і значний рівень випромінювання у діапазоні радіочастот.
Керовані випрямлячі, які застосовують для живлення двигунів постійного струму, класифікують за такими ознаками:
за кількістю фаз напруги живлення: однофазні й трифазні;
за вихідною потужністю: малопотужні (до 10кВт), серед-ньої потужності (від 10 до 1000 кВт) і потужні (понад 1000 кВт);
за схемою вмикання вентилів і підмикання навантаження: нульовій й мостові, симетричні й несиметричні;
за зміною полярності вихідної напруги: нереверсивні й реве-рсивні.
Структурна схема КВ складається з силового трансформатора TV, блока тиристорів БТ, згладжуючого дроселя ЗД і системи імпу-льсно-фазового керування блоком тиристорів (СІФК).
Силовий
трансформатор TV
призначений для узгодження напру-ги
мережі живлення
![]() і кола навантаження та для зменшення
випливу випрямленого струму на мережу
живлення. Крім того, він електрично
відокремлює
коло
навантаження
від мережі.
Блок
тирис-торів забезпечує випрямляння й
регулювання напруги. Згладжую-чий
дросель зменшує пульсацію випрямленого
струму. Система імпульсно-фазового
керування формує послідовність
відкриваючих імпульсів, які змінюють
кути відкривання тиристорів відповідно
до напруги керування
і кола навантаження та для зменшення
випливу випрямленого струму на мережу
живлення. Крім того, він електрично
відокремлює
коло
навантаження
від мережі.
Блок
тирис-торів забезпечує випрямляння й
регулювання напруги. Згладжую-чий
дросель зменшує пульсацію випрямленого
струму. Система імпульсно-фазового
керування формує послідовність
відкриваючих імпульсів, які змінюють
кути відкривання тиристорів відповідно
до напруги керування
![]() ,
регулюючи середнє значення випрямленої
напруги
,
регулюючи середнє значення випрямленої
напруги
![]() .
.
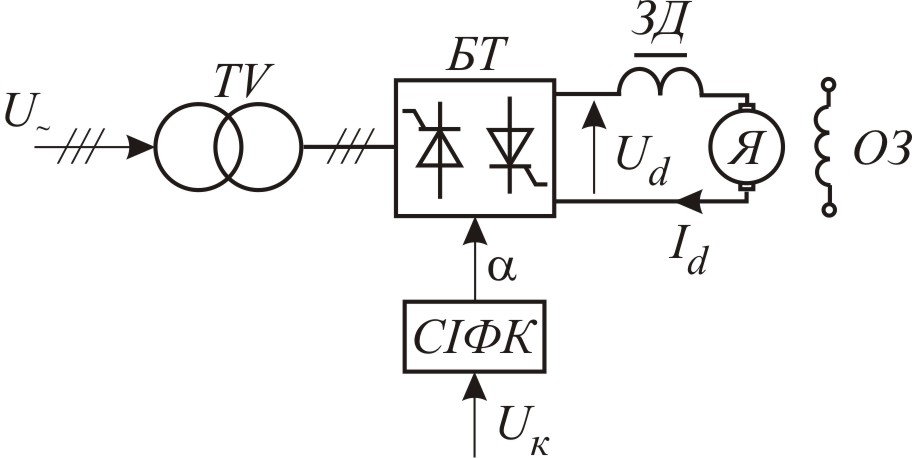
Рис.4.1. Спрощена структурна схема керованого випрямляча
Для обґрунтування вибору типу керованого перетворювача необ-хідно знати його основні характеристики. До них відносяться:
середні значення випрямленої напруги та струму
 ;
;коефіцієнти корисної дії
 та потужності
та потужності
 ;
;коефіцієнт випрямної схеми
 – відношення найбільшого середнього
значення випрямленої напруги до діючого
значення вихідної наруги трансформатора;
– відношення найбільшого середнього
значення випрямленої напруги до діючого
значення вихідної наруги трансформатора;коефіцієнт збільшення розрахункової потужності транс-форматора
 – відношення повної потужності
транс-форматора до потужності випрямленого
струму;
– відношення повної потужності
транс-форматора до потужності випрямленого
струму;коефіцієнт використання вентилів за напругою

 – відношення максимальної зворотної
напруги на вентилях до середнього
значення випрямленої напруги;
– відношення максимальної зворотної
напруги на вентилях до середнього
значення випрямленої напруги;коефіцієнт використання вентилів за струмом

 – відношення діючого значення струму
вентиля до се-реднього значення
випрямленого струму;
– відношення діючого значення струму
вентиля до се-реднього значення
випрямленого струму;коефіцієнт пульсації
 – відношення певної гармоніки пульсації
випрямленої напруги до середнього
зна-чення випрямленої напруги;
– відношення певної гармоніки пульсації
випрямленої напруги до середнього
зна-чення випрямленої напруги;коефіцієнт спотворення
 – відношення діючого значення струму
основної гармоніки до діючого значення
повного струму первинної обмотки
трансформатора.
– відношення діючого значення струму
основної гармоніки до діючого значення
повного струму первинної обмотки
трансформатора.
Для зручності порівняння основних випрямних схем у випадку активно-індуктивного навантаження їхні параметри наведені в табл.3.1.
Таблиця 3.1
Схема КВ |
Коефіцієнти |
|||||
|
|
|
|
|
|
|
Однофаз-на мосто- ва симет-рична |
0,9 |
1,57 |
0,707 |
1,11 |
0,667 |
0,9 |
Трифазна з нульовим проводом |
1,17 |
2,10 |
0,58 |
1,35 |
0,25 |
0,827 |
Трифазна мостова |
2,34 |
1,05 |
0,58 |
1,05 |
0,057 |
0,955 |
Серед багатьох випрямних схем для живлення двигунів постій-ного струму в залежності від потужності використовують:
о
 днофазну
мостову схему
(мала потужність);
днофазну
мостову схему
(мала потужність);трифазну нульову схему (середня потужність і низька напруга);
трифазну мостову схему (се-редня і велика потужність та висока напруга).
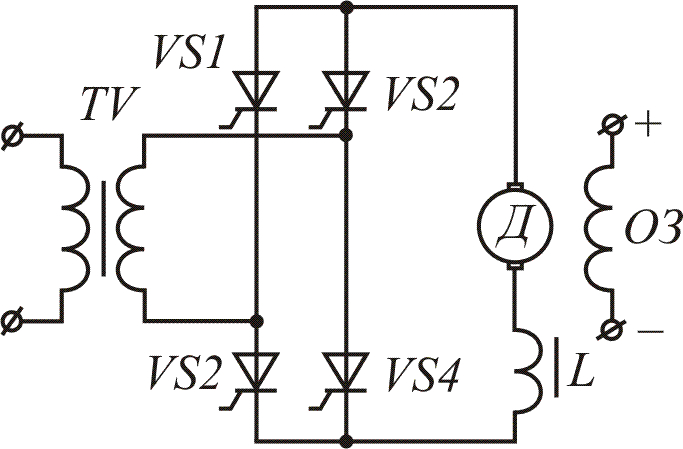
О
Рис.4.2. Однофазна
симметрична
схема
КВ
Трансформатор
![]() у мостовій схемі не є обов’язковим,
коли випрямлена напруга менша
у мостовій схемі не є обов’язковим,
коли випрямлена напруга менша
![]() ,
бо для неї
,
бо для неї
![]() .
Перевагою симетричного КВ є можливість
формувати процес зменшення струму при
індуктивному навантаженні. Коли такої
потреби немає, то доцільно використовувати
несиметричну схему КВ, бо схема керування
нею простіша.
.
Перевагою симетричного КВ є можливість
формувати процес зменшення струму при
індуктивному навантаженні. Коли такої
потреби немає, то доцільно використовувати
несиметричну схему КВ, бо схема керування
нею простіша.
Багатофазні схеми КВ порівняно з однофазними мають такі пере-ваги: меншу пульсацію випрямленої напруги та струму, симетричне навантаження мережі живлення, краще використання трансформа-тора і вентилів.
Зокрема, трифазна нульова схема (рис.4.3,а) порівняно з однофа-
а
б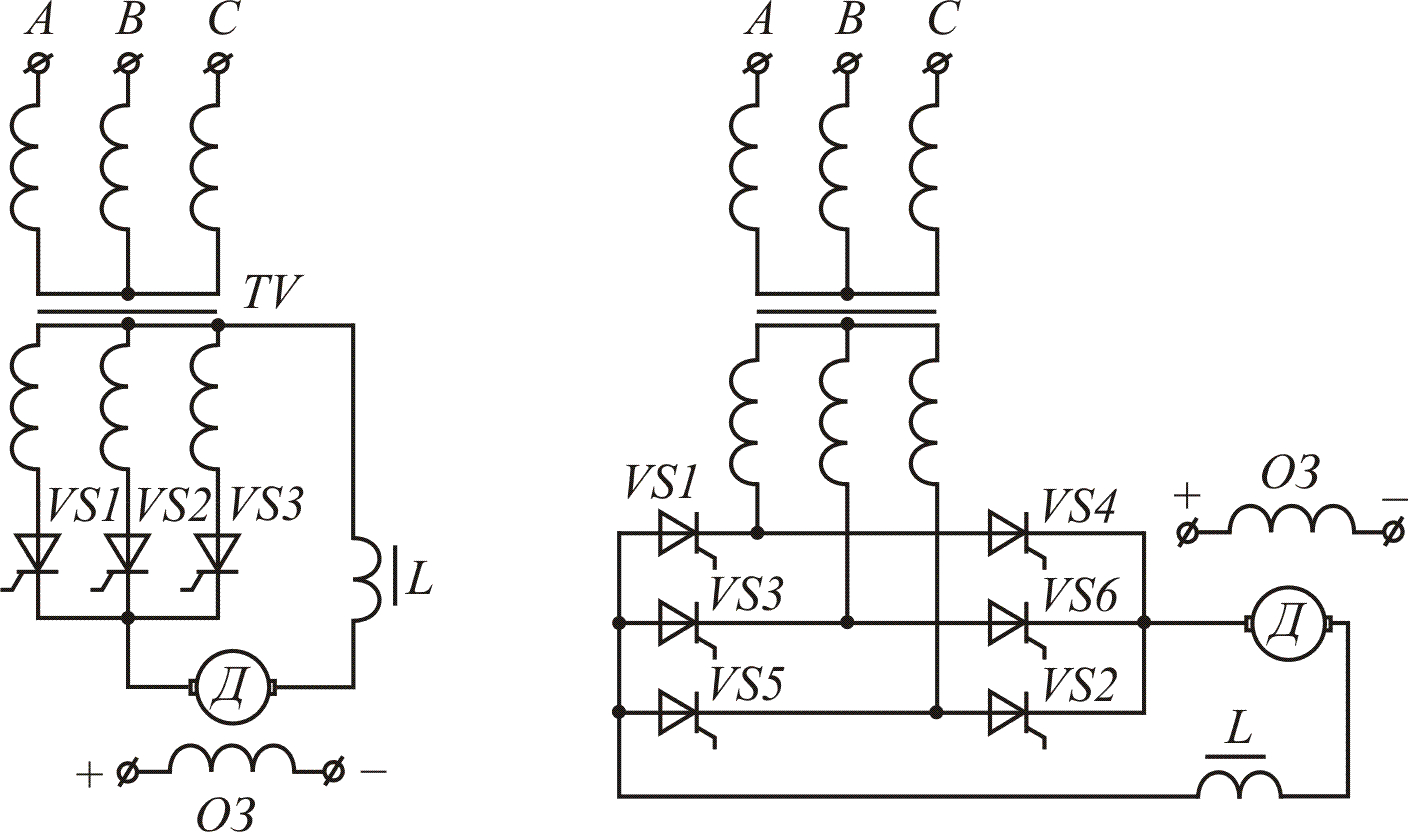
Рис.4.3. Трифазні нульова (а) і мостова схеми КВ
зною має такі переваги як вдвоє меншу амплітуду пульсацій випря-мленої напруги і у 1,5 рази менше значення коефіцієнта використа-ння вентилів за струмом. Але коефіцієнт використання вентилів за напругою у 1,33 рази більший. У цій схемі можливе формування процесу зменшення струму при індуктивному навантаженні, але намагнічуючі сили стержнів трансформатора не зрівноважують одна одну і це призводить до насичення осердя трансформатора і, як наслідок, збільшує його потужність.
Трифазна
мостова схема КВ
є найбільше досконалою за вико-ристанням
вентилів за напругою і струмом, бо вона
є з’єднанням двох трифазних нульових
схем. Пульсації випрямленої напруги
мають шестикратну частоту
![]() .
Тому
такі перетворювачі іноді називають
умовно шестифазними.
.
Тому
такі перетворювачі іноді називають
умовно шестифазними.
Н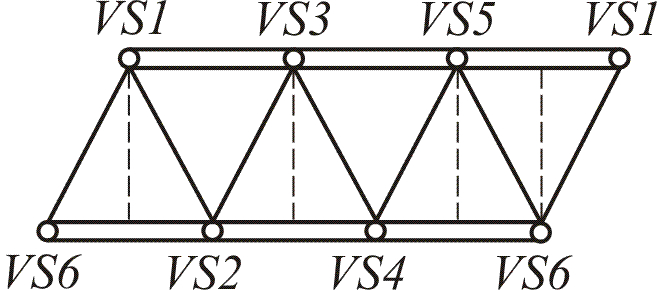 а
рис.4.3,б тиристори про-нумеровані у
порядку подавання відкриваючих імпульсів.
Послі-довність їх комутації ілюструє
циклограма на рис.4.4, на якій показані
ділянки одночасної роботи вентилів
різних груп.
а
рис.4.3,б тиристори про-нумеровані у
порядку подавання відкриваючих імпульсів.
Послі-довність їх комутації ілюструє
циклограма на рис.4.4, на якій показані
ділянки одночасної роботи вентилів
різних груп.
Я
Рис.4.4.
Циклограма комутації тиристорів
Невелика амплітуда і висока частота пульсацій, ефективне вико-ристання трансформатора й низька зворотна напруга на тиристорах, можливість інверторного режиму і високий ККД зумовили переваж-не використання трифазної мостової схеми в системах автоматизо-ваного електропривода з широким діапазоном регулювання швид-кості.
Реверсивні тиристорні перетворювачі використовують за необхідністю зміни напряму струму у споживачі. Вони складаються з двох комплектів керованих випрямлячів, які з’єднують зустрічно-паралельно або перехресно. В перехресній схемі кожен комплект живиться від окремої обмотки триобмоткового трансформатора, в зустрічно-паралельній – від однієї обмотки, що є її перевагою, бо зменшує потужністю трансформатора майже на 20%.
Системи
керування тиристорами поділяються на
сумісні
(одно-часне керування двома групами) і
роздільні
(окреме керування групами). У
зустрічно-паралельній схемі реверсивного
перетворювача з роздільним керуванням
керуючі імпульси подаються лише на один
комплект тиристорів (на КВ1 або КВ2), що
унеможливлює виникнення зрівнювальних
струмів між групами в період реверсу-вання.
Таку роботу забезпечує логічний
перемикальний пристрій ЛПП, який визначає
момент, коли струм робочого комплекта
стає рівним нулю, блокує подачу на нього
імпульсів і після паузи трива-лістю до
![]() дозволяє подачу керуючих імпульсів на
інший комплект (рис. 4.5).
дозволяє подачу керуючих імпульсів на
інший комплект (рис. 4.5).
Полярність
вихідної напруги перетворювача задається
полярніс-тю напруги керування
:
сигнал
![]() відповідає позитивній напрузі
,
а сигнал
відповідає позитивній напрузі
,
а сигнал
![]() – негативній. ЛПП опрацьовує сигнал
– негативній. ЛПП опрацьовує сигнал
![]() і сигнали
і сигнали
![]() та
та
![]() ,
які поступають від давачів наявності
струму ДНС1 і ДНС2, і формує логічні
сигнали
,
які поступають від давачів наявності
струму ДНС1 і ДНС2, і формує логічні
сигнали
![]() та
та
![]() на СІФК1 чи СІФК2.
на СІФК1 чи СІФК2.
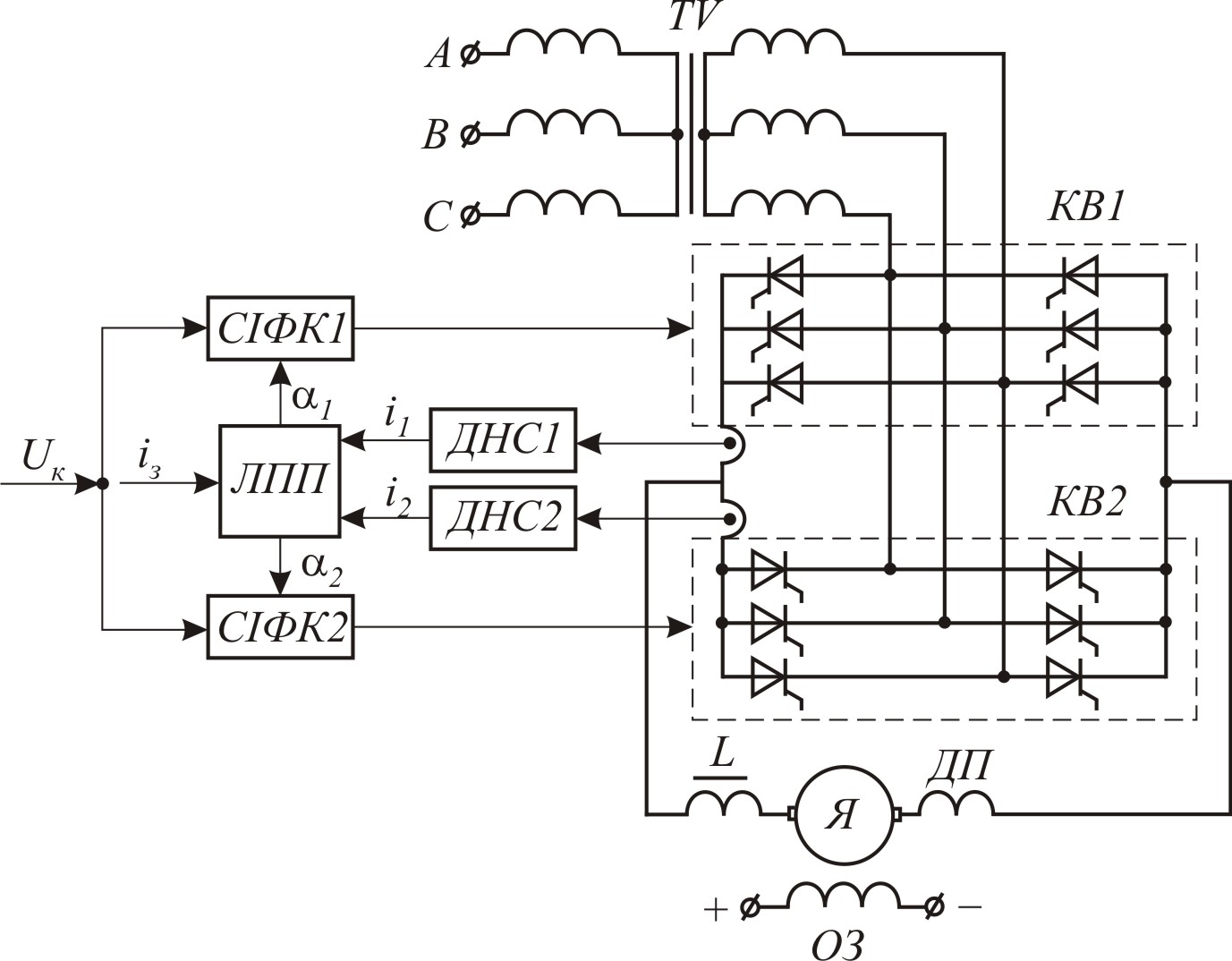
Рис.4.5. Зустрічно-паралельна схема реверсивного КВ
Роздільне керування зменшує ймовірність перекидання інверто-ра і збільшує ККД перетворювача завдяки відсутності зрівнюваль-них струмів, що дає певну економію електроенергії і зменшує поту-жність трансформатора. Тому реверсивна схема з роздільним керу-ванням широко використовується. Недолік – наявність паузи до при зміні полярності вихідної напруги.