

3.3. Гальмівні режими двигунів постійного струму
Робота багатьох виробничих механізмів зв’язана з необхідністю
швидкої і точної зупинки та зміни напряму руху (реверсування). Гальмування двигунів з незалежним збудженням можна здійснювати такими способами:
гальмуванням з віддачею енергії в мережу (рекуперативне);
динамічне гальмування;
гальмування противмиканням.
Гальмування з віддачею енергії в мережу здійснюють тоді, ко-ли швидкість двигуна більша швидкості ідеального холостого ходу (при регулюванні магнітним потоком). Тоді при швидкому збільшенні магнітного потоку до номінального значення ЕРС обмотки якоря стає більшою напруги в мережі живлення і струм змінює знак, бо
![]()
 .
(3.16)
.
(3.16)
М
Рис.3.11.
Механічні характерис-тики при
рекуперативному галь-
муванні![]() .
.
Підставивши в (3.3) від’ємне значе-ння моменту, одержимо рівняння механічної характеристики
![]() ,
(3.17)
,
(3.17)
на
яку перейде працювати двигун, як показано
стрілками на рис.3.11. На ділянці
![]() двигун працює в генераторному режи-мі,
а на ділянці
двигун працює в генераторному режи-мі,
а на ділянці
![]() – у режимі двигуна. Такий же режим
галь-мування виникає, коли швидко
зменшити напругу живлення в регу-льованому
електроприводі.
– у режимі двигуна. Такий же режим
галь-мування виникає, коли швидко
зменшити напругу живлення в регу-льованому
електроприводі.
Гальмування
з віддачею енергії в мережу двигунів
послідовного збудження здійснити не
можна, бо при
![]() одночасно змінюєть-ся напрям струму і
магнітного потоку і, отже, гальмівного
моменту не виникає.
одночасно змінюєть-ся напрям струму і
магнітного потоку і, отже, гальмівного
моменту не виникає.
Динамічне гальмування відбувається при відмиканні якоря двигуна від мережі і замиканні на гальмівний резистор. В режимі динамічного гальмування як і у рекуперативному двигуни працюють в генераторному режимі, перетворюючи кінетичну енергію системи в електричну, яка виділяється у виді тепла в опорах якорного кола. При цьому потрібно переключити обмотку збудження двигуна послідовного збудження так, щоби струм в ній не змінив свого напряму.
а
б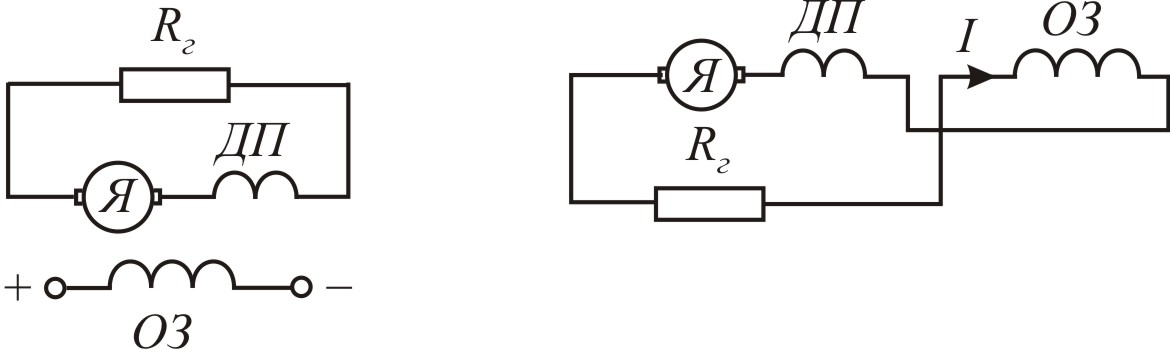
Рис.3.12. Схеми динамічного гальмування двигунів незалежного (а) і послідовного(б) збудження
М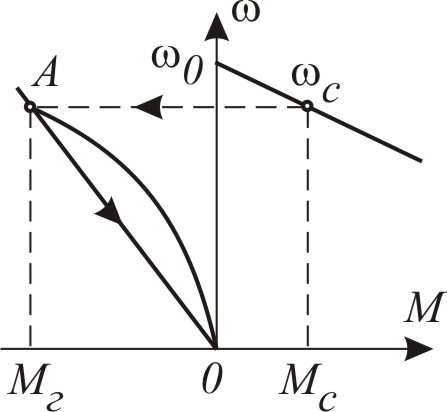 еханічна
характеристика при гальмуванні двигуна
з незалеж-ним збудженням описується
рівнянням
еханічна
характеристика при гальмуванні двигуна
з незалеж-ним збудженням описується
рівнянням
![]() (3.18)
(3.18)
і представляє собою пряму лінію (пряма ОА на рис.3.13.).
Величина гальмівного опору
![]() .
(3.19)
.
(3.19)
П
Рис.3.13. Механічні
характерис-тики при динамічному гальму-
ванні
![]() .
(3.20)
.
(3.20)
В (3.20) магнітний потік залежить від струму і тому механічна характеристика має вид, наведений на рис.3.13 (крива АО).
Гальмування противмиканням часто використовують для швидкого гальмування і воно зводиться до зміни полярності напруги тільки на якорі. При цьому напруга і ЕРС обмотки якоря складаються, струм змінює свій знак і виникає гальмівний момент. Обмеження струму здійснюється або засобами автоматики, або вмиканням в коло якоря додаткового опору, величина якого

![]()
за умови нехтування індуктивністю кола якоря.
З
Рис.3.14.
Механічні характеристики двигунів в
режимі противмикання![]() відбувається процес гальмування за
рахунок енергій мережі і кінетичної
енергії. При
двигуни відмикають від мережі і
гальмування закінчується. Якщо цього
не зробити, то двигун почне розганятися
у протилежну сторону (реверсуватись) і
в точках
відбувається процес гальмування за
рахунок енергій мережі і кінетичної
енергії. При
двигуни відмикають від мережі і
гальмування закінчується. Якщо цього
не зробити, то двигун почне розганятися
у протилежну сторону (реверсуватись) і
в точках
![]() чи
чи
![]() наступають усталені режими.
наступають усталені режими.
Електричне гальмування використовується переважно при частих пусках і швидких зупинках. В нереверсивних приводах перевагу віддають динамічному гальмуванні, а у реверсивних – гальмуванню противмиканням.