

Системи керування електроприводами
В цій частині розглянуто системи керування електроприводів. Зокрема, в розділах 7 і 8 описано дискретні системи керування, побудовані на контактній та безконтактній елементній базі, в розділах 8-14 проведено аналіз основних замкнених систем керування двигунами постійного і змінного струму, подається синтез регуляторів за заданими статичними і динамічними показниками і означена доцільність використання систем скалярного і векторного керування асинхронними і синхронними двигунами.
В розділі 15 викладено теорію аналового слідкуючого електропривода і дається аналіз точності їх роботи при різних зворотних зв’язках та різних задаючих впливах. В розділі 16 описано узагальнену структуру цифрових систем керування і методику синтезу параметрів цифрового ПІД-регулятора швидкості.
Розділ 7
Релейно-контакторні системи керування електроприводами
7.1. Загальні положення
Релейно-контакторні системи керування (РКСК) представляють собою логічні системи керування, які побудовані на релейно-конта-кторній елементній базі і які здійснюють автоматизацію роботи дви-гунів. РКСК забезпечує автоматизацію таких операцій:
вибір напряму обертання;
пуск і гальмування двигуна;
створення часових пауз при русі;
захисне відключення двигуна;
зупинка виробничого механізму у заданому положенні.
Ці операції необхідні для забезпечення руху робочого органа механізму згідно технологічних умов.
Безпосереднім об’єктом керування РКСК є двигун, який живить-ся від мережі. Електропривод, виконуючий зазначені операції, пред-ставляє собою простий нерегульований електропривод таких меха-нізмів як механізми кранів, конвеєри, компресори, вентилятори, по-мпи тощо. В якості двигунів використовуються асинхронні і синх-ронні двигуни, а також двигуни постійного струму з послідовним і змішаним збудженням, в основному, на транспорті.
В РКСК використовується релейно-контакторна апаратура, яка має такі основні характеристики:
час спрацювання
 ,
с 0,005...0,1;
,
с 0,005...0,1;число включень на годину
 600...1200 для контакторів і
600...1200 для контакторів і
1200…3600 для реле;
споживана потужність
 ,
В
А
5...50 для контакторів і
,
В
А
5...50 для контакторів і
0,2...5 для реле;
строк служби – загальне
число включень 106...107.
До переваг РКСК відносяться наявність гальванічної розв’язки кіл, значна комутаційна потужність, висока завадостійкість і єдине джерело живлення.
Недоліки РКСК такі: наявність контактів, обмежений строк слу-жби, невисока швидкодія, великі вага і габарити та значне енергос-поживання.
7.2. Структура релейно-контакторних систем керування
За функціональним призначенням РКСК складаються з двох складових: керуючої К, яка формує алгоритми керування, і виконав-чої В, яка здійснює безпосередній виплив на двигун-контактори (рис.7.1).
Керуючу
частину, зазвичай, поділяють на дві
складові: одну, що формує загальні
команди на рух механізму
![]() згідно технологічному режиму його
роботи (верхній рівень керування), і
другу, яка формує необхідну якість руху
(нижній рівень керування). Функціон
згідно технологічному режиму його
роботи (верхній рівень керування), і
другу, яка формує необхідну якість руху
(нижній рівень керування). Функціон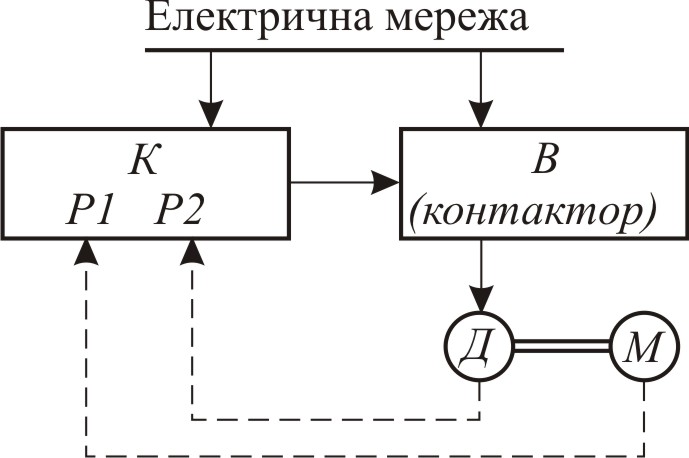 ально
розділені частини
ально
розділені частини
![]() і
і
![]() конструктивно можуть бути як відокремленими,
так і об’єднані у виді одного керуючого
пристрою, наприклад, одної панелі
керування.
конструктивно можуть бути як відокремленими,
так і об’єднані у виді одного керуючого
пристрою, наприклад, одної панелі
керування.
В
Рис.7.1. Структурна
схема РКСК

Рис.7.2. Загальна функціональна схема РКСК
У виконанні кожної такої функції приймає участь не вся РКСК, а тільки її частина – типовий вузол. Отже, функціональну схему РКСК можна представити у виді набору вузлів, які забезпечують заданий технологічний процес (рис.7.2).
Крім вказаних на рис.7.2 вузлів до складу РКСК можуть входити і додаткові вузли згідно з технологічним процесом, наприклад, вузол вибору швидкості, вузол формування циклу роботи механізму тощо.