

1.2.3. Классификация систем
Системы принято подразделять на физические и абстрактные, динамические и статические, простые и сложные, естественные и искусственные, с управлением и без управления, непрерывные и дискретные, детерминированные и стохастические, открытые и замкнутые.
Деление систем на физические и абстрактные позволяет различать реальные системы (объекты, явления, процессы) и системы, являющиеся определенными отображениями (моделями) реальных объектов.
Для реальной системы может быть построено множество систем - моделей, различаемых по цели моделирования, по требуемой степени детализации и по другим признакам.
Например, реальная ЛВС, с точки зрения системного администратора, - совокупность программного, математического, информационного, лингвистического, технического и других видов обеспечения, с точки зрения противника, - совокупность объектов, подлежащих разведке, подавлению (блокированию), уничтожению, с точки зрения технического обслуживания, - совокупность исправных и неисправных средств.
Деление систем на простые и сложные (большие) подчеркивает, что в системном анализе рассматриваются не любые, а именно сложные системы большого масштаба. При этом выделяют структурную и функциональную (вычислительную) сложность.
Общепризнанной границы, разделяющей простые, большие и сложные системы, нет. Однако условно будем считать, что сложные системы характеризуются тремя основными признаками: свойством робастности, наличием неоднородных связей и эмерджентностью.
Во-первых, сложные системы обладают свойством робастности - способностью сохранять частичную работоспособность (эффективность) при отказе отдельных элементов или подсистем. Оно объясняется функциональной избыточностью сложной системы и проявляется в изменении степени деградации выполняемых функций, зависящей от глубины возмущающих воздействий. Простая система может находиться не более чем в двух состояниях: полной работоспособности (исправном) и полного отказа (неисправном).
Во-вторых, в составе сложных систем кроме значительного количества элементов присутствуют многочисленные и разные по типу (неоднородные) связи между элементами. Основными типами считаются следующие виды связей: структурные (в том числе иерархические), функциональные, каузальные (причинно-следственные, отношения истинности), информационные, пространственно-временные. По этому признаку будем отличать сложные системы от больших систем, представляющих совокупность однородных элементов, объединенных связью одного типа.
В-третьих, сложные системы обладают свойством, которое отсутствует у любой из составляющих ее частей. Это интегратив-ность (целостность), или эмерджентностъ. Другими словами, отдельное рассмотрение каждого элемента не дает полного представления о сложной системе в целом. Эмерджентность может достигаться за счет обратных связей, играющих важнейшую роль в управлении сложной системой.
Считается, что структурная сложность системы должна быть пропорциональна объему информации, необходимой для ее описания (снятия неопределенности). В этом случае общее количество информации о системе S, в которой априорная вероятность появления j-го свойства равна р(yj) определяется известным соотношением для количества информации
![]()
Это энтропийный подход к дескриптивной (описательной) сложности. Одним из способов описания такой сложности является оценка числа элементов, входящих в систему (переменных, состояний, компонентов), и разнообразия взаимозависимостей между ними.
В общей теории систем утверждается, что не существует систем обработки данных, которые могли бы обработать более чем 2-10547 бит в секунду на грамм своей массы. При этом компьютерная система, имеющая массу, равную массе Земли, за период, равный примерно возрасту Земли, может обработать порядка 10593 бит информации (предел Бреммермана). Задачи, требующие обработки более чем 10593 бит, называются трансвычислительными. В практическом плане это означает, что, например, полный анализ системы из 110 переменных, каждая из которых может принимать 7 разных значений, является трансвычислительной задачей.
Для оценки сложности функционирования систем применяется алгоритмический подход. Он основан на определении ресурсов (время счета или используемая память), используемых в системе при решении некоторого класса задач: Например, если функция времени вычислений является полиномиальной функцией от входных данных, то мы имеем дело с полиномиальным по времени, или «легким» алгоритмом. В случае экспоненциального по времени алгоритма говорят о его «сложности». Алгоритмическая сложность изучается в теории NP-полных задач.
Сложные системы допустимо делить на искусственные и естественные (природные).
Искусственные системы, как правило, отличаются от природных наличием определенных целей функционирования (назначением) и наличием управления.
Рассмотрим еще один важный признак классификации систем. Принято считать, что система с управлением, имеющая нетривиальный входной сигнал x(t) и выходной сигнал y(t), может рассматриваться как преобразователь информации, перерабатывающий поток информации (исходные данные) x(i) в поток информации (решение по управлению) y(f).
В соответствии с типом значений x(t), y(t), z(t) и t системы делятся на дискретные и непрерывные.
Такое деление проводится в целях выбора математического аппарата моделирования. Так, теория обыкновенных дифференциальных уравнений и уравнений в частных производных позволяет исследовать динамические системы с непрерывной переменной (ДСНП). С другой стороны, современная техника создает антропогенные динамические системы с дискретными событиями (ДСДС), не поддающиеся такому описанию. Изменения состояния этих систем происходят не непрерывно, а в дискретные моменты времени, по принципу «от события к событию». Математические (аналитические) модели заменяются на имитационные, дискретно-событийные: модели массового обслуживания, сети Петри, цепи Маркова и др.
Примеры фазовых траекторий ДСДС и ДСНП показаны на рис. 1.3, а, б.
Для ДСДС траектория является кусочно-постоянной и формируется последовательностью событий и. Последовательность отрезков постоянства отражает последовательность состояний z системы, а длительность каждого отрезка отражает время пребывания системы в соответствующем состоянии. Под состоянием при этом понимается «физическое» состояние (например, число сообщений, ожидающих передачи в каждом узле обработки). Состояния принимают значения из дискретного множества.
|
|
|
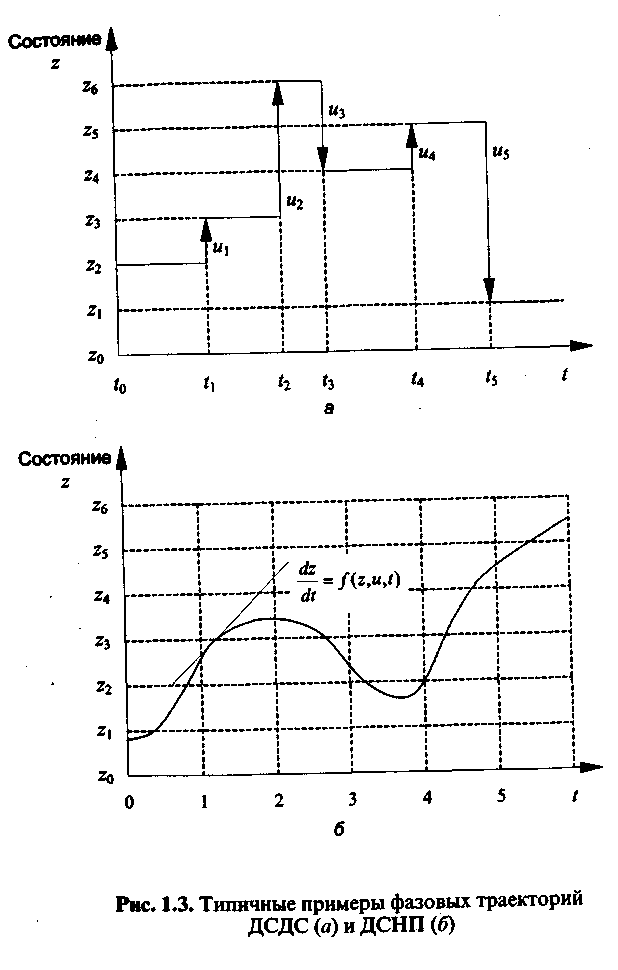

Таким образом, траектория описывается последовательностью из двух чисел (состояния и времени пребывания в нем). Следует подчеркнуть, что термин «дискретный» отличается от широко используемого прилагательного «цифровой», поскольку последнее означает лишь то, что анализ задачи ведется не в терминах вещественной числовой переменной, а численными методами. Траектория ДСНП, состояниями которой являются точки пространства Rn, постоянно изменяется и, вообще говоря, развивается на основе непрерывных входных воздействий. Здесь под состоянием понимается «математическое» состояние в том смысле, что оно включает в себя информацию к данному моменту времени (кроме внешних воздействий), которая необходима для однозначного определения дальнейшего поведения системы. Математическое определение включает в себя и физическое определение, но не наоборот.
Для перехода от детерминированной к стохастической системе достаточно в правые части соотношений (1.4) и (1.5) добавить в качестве аргументов функционалов случайную функцию p(t), принимающую значения на непрерывном или дискретном множестве действительных чисел.
Следует иметь в виду, что в отличие от математики для системного анализа, как и для кибернетики, характерен конструктивный подход к изучаемым объектам. Это требует обеспечения корректности задания системы, под которой понимается возможность фактического вычисления выходного сигнала y(t) (с той или иной степенью точности) для всех t > 0 при задании начального состояния системы z(0) и входного сигнала x(t) для всех ti. Поэтому при изучении сложных систем приходится переходить к конечным аппроксимациям.
Системы с нетривиальным входным сигналом x(t), источником которого нельзя управлять (непосредственно наблюдать), или системы, в которых неоднозначность их реакции нельзя объяснить разницей в состояниях, называются открытыми.
Признаком, по которому можно определить открытую систему, служит наличие взаимодействия с внешней средой. Взаимодействие порождает проблему «предсказуемости» значений выходных сигналов и, как следствие, - трудности описания открытых систем.
Примером трудностей описания является понятие «странный аттрактор» - специфическое свойство некоторых сложных систем. Простейший аттрактор, называемый математиками неподвижной точкой, представляет собой такой вид равновесия, который характерен для состояния устойчивых систем после кратковременного возмущения (состояние покоя емкости с водой после встряхивания). Второй вид аттрактора - предельный цикл маятника. Все разновидности предельного цикла предсказуемы. Третья разновидность называется странным аттрактором. Обнаружено много систем, имеющих встроенные в них источники нарушений, которые не могут быть заранее предсказаны (погода, место остановки шарика в рулетке). В экспериментах наблюдали за краном, из которого нерегулярно капали капли, хотя промежутки должны быть регулярными и предсказуемыми, так как вентиль зафиксирован и поток воды постоянен.
Математическим примером странного аттрактора является аттрактор Хенона - система уравнений, смоделированная в LabVIEW(рис. 1.4, а, б).
|
|
|


Понятие открытости систем конкретизируется в каждой предметной области. Например, в области информатики открытыми информационными системами называются программно-аппаратные комплексы, которым присущи следующие свойства:
-
переносимость (мобильность) - программное обеспечение(ПО) может быть легко перенесено на различные аппаратные платформы и в различные операционные среды;
-
стандартность - программное обеспечение соответствует опубликованному стандарту независимо от конкретного разработчика ПО;
-
наращиваемость возможностей - включение новых программных и технических средств, не предусмотренных в первоначальном варианте;
-
• совместимость - возможность взаимодействовать с другими комплексами на основе развитых интерфейсов для обмена данными с прикладными задачами в других системах.
Примером открытой среды является модель OSE .(Open System Environment), предложенная комитетом IEEE POSIX. На основе этой модели Национальный институт стандартов и технологии США выпустил документ «Application Portability Profile (APP). The U.S. Government's Open System Environment Profile OSE/1
Version 2.0», который определяет рекомендуемые спецификации в области информационных технологий, гарантирующие мобильность системного и прикладного программного обеспечения.
В отличие от открытых замкнутые (закрытые) системы изолированы от среды - не оставляют свободных входных компонентов ни у одного из своих элементов. Все реакции замкнутой системы однозначно объясняются изменением ее состояний. Вектор входного сигнала х(() в замкнутых системах имеет нулевое число компонентов и не может нести никакой информации. Замкнутые системы в строгом смысле слова не должны иметь не только входа, но и выхода. Однако даже в этом случае их можно интерпретировать как генераторы информации, рассматривая изменение их внутреннего состояния во времени. Примером физической замкнутой системы является локальная сеть для обработки конфиденциальной информации.
Основным противоречием, которое приходится разрешать в замкнутых системах, является проблема возрастания энтропии. Согласно второму закону термодинамики по мере движения замкнутой системы к состоянию равновесия она стремится к максимальной энтропии (дезорганизации), соответствующей минимальной информации. Открытые системы могут изменить это стремление к максимальной энтропии, получая внешнюю по отношению к системе свободную энергию, и этим поддерживают организацию.