

4.4.3 Определение параметров реакций во всех кинематических парах данной группы
Реакции
![]() и
и
![]() неизвестны по величине, но известны по
направлению. Измерим векторы неизвестных
реакций и полученные значения умножим
на масштабный коэффициент силы.
неизвестны по величине, но известны по
направлению. Измерим векторы неизвестных
реакций и полученные значения умножим
на масштабный коэффициент силы.
![]() =[8–1]
=[8–1]![]()
![]() =[8–2]
=[8–2]
![]()
![]() =[7–8]
=[7–8]
![]()
![]() =[4–8]
=[4–8]
![]()
4.4.4 Построение планов положения механизма 1-го класса с указанием сил, действующих на звено 1
Выделяем кривошип
из механизма и вычерчиваем его в
масштабе![]() .
Рассмотрим начальное звено 1. В точке А
приложим известную реакцию
.
Рассмотрим начальное звено 1. В точке А
приложим известную реакцию
![]() ,
а в точке О – неизвестную реакцию
,
а в точке О – неизвестную реакцию
![]() . Противоположно направлению углового
ускорения
. Противоположно направлению углового
ускорения
![]() прикладываем главный момент инерции
прикладываем главный момент инерции
![]() и
уравновешивающий момент
и
уравновешивающий момент
![]() .
.
4.4.5 Определение уравновешивающего момента
Уравновешивающий
момент
![]() находим из уравнения моментов сил
относительно точки В:
находим из уравнения моментов сил
относительно точки В:
![]()
![]()
4.4.6 Построение плана сил входного звена
Найдем длины векторов на плане сил через масштабный коэффициент силы:
[1–2]=![]()
![]()
[2–3]=![]()
Построение плана сил осуществляем следующим образом:
Из точки 1 проводим
отрезок [1–2] параллельно реакции
![]() противоположно по направлению. Из точки
2 проводим вектор [2–3] параллельно
вектору
противоположно по направлению. Из точки
2 проводим вектор [2–3] параллельно
вектору
![]() .
Тогда вектор [3–1] соответствует реакции
.
Тогда вектор [3–1] соответствует реакции
![]() .
.
4.4.7 Расчет параметров реакции в коренном подшипнике
Определяем значение искомой реакции в коренном подшипнике через масштабный коэффициент силы:
![]() [3–1]
[3–1]![]()
Измеряем
угол
![]()
Б. Аналитическое решение задачи
4.4.8 Составление схемы алгоритма силового расчета группы Ассура(2,3) и механизма 1-го класса
Для расчета группы Ассура (2,3) (рисунок. 4.1) и механизма 1 класса (рисунок. 4.2) аналитический расчет выглядит следующим образом:
-
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 .
.
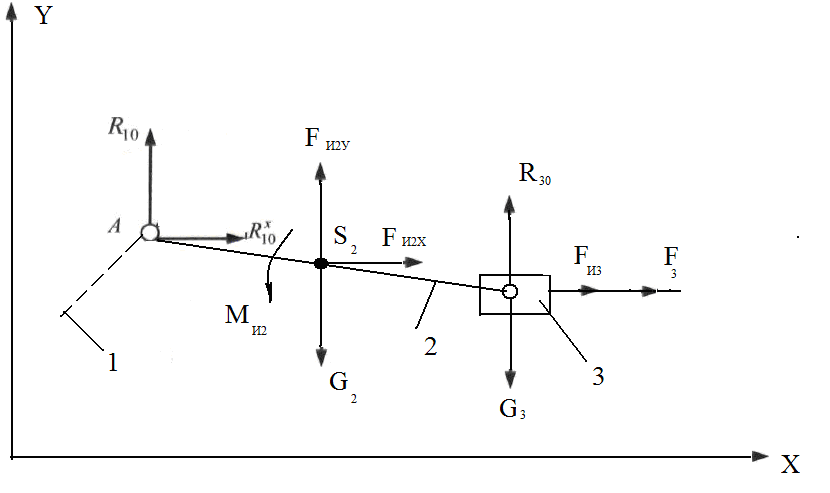
Рисунок 4.1

Рисунок 4.2
4.4.9 Расчет параметров реакции во всех кинематических парах и уравновешивающего момента
1. Определяем силы тяжести:
![]() ;
;
![]() ;
;
![]() .
.
2. Определяем моменты сил инерции и силы инерции:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
3. Определяем реакции группы Ассура (2,3):
![]()

![]() .
Определяем проекции
реакции R12:
.
Определяем проекции
реакции R12:
![]()
![]()
5. Определяем проекции реакции R23 во внутренней кинемат.паре В:
![]()
![]()
6. Определяем
уравновешивающий момент
![]() :
:
![]()
7. Определяем
проекцию реакции
![]() :
:
![]()
![]()
8. Определяем полную
реакцию
![]() :
:
![]()
9. Определяем полную
реакцию
![]() :
:
![]()
10. Определяем
полную реакцию
![]() :
:
![]()
![]()
Сравним значения, в графическом и аналитическом методе расчёта:
Таблица 4.1 Сравнение полученных результатов
|
Метод расчёта |
|
|
|
|
|
|
Графический |
26100 |
26000 |
29000 |
240 |
3500 |
|
Аналитический |
26200 |
26100 |
29400 |
243 |
3476 |
4.5 Подготовка исходных данных для расчёта на эвм
Таблица 4.1 Исходные данные для ЭВМ
|
№ |
Параметр |
Условное обозначение |
Единица измерений |
Величина |
||
|
1 |
Схема кривошипно- ползунного механизма
|
|
|
|
||
|
2 |
Размеры звеньев |
е |
м м м м |
0,03 0,095 0,315 0 |
||
|
3 |
Начальная обобщённая координата |
|
град |
0 |
||
|
4 |
Массы и моменты Инерции звеньев |
|
кг кг кг
|
42 2,6 2,1 0,017 |
||
|
5 |
Постоянная составляющая приведенного момента инерции |
|
|
1,86 |
||
|
№ Положения кривошипа |
Угловая
скорость
|
Угловое
ускорение
|
Движущая
сила газа на поршень |
|||
|
1 |
-238,579 |
129,176 |
-52800 |
|||
|
2 |
-239,1 |
-572,064 |
-47850 |
|||
|
3 |
-240,583 |
-700,654 |
-31900 |
|||
|
4 |
-241,985 |
-533,21 |
-18700 |
|||
|
5 |
-242,702 |
-123,422 |
-3250 |
|||
|
6 |
-242,885 |
-30,547 |
-2750 |
|||
|
7 |
-242,768 |
130,325 |
0 |
|||
|
8 |
-242,348 |
253,254 |
0 |
|||
|
9 |
-241,729 |
299,439 |
0 |
|||
|
10 |
-240,98 |
367,632 |
-5500 |
|||
|
11 |
-240,072 |
439,598 |
-14850 |
|||
|
12 |
-239,143 |
386,438 |
-24200 |
|||
|
13 |
-238,579 |
129,177 |
-26400 |
|||
