

1. Описание работы машины и исходные данные к проектированию
Легковой переднеприводной автомобиль приводится в движение двухтактным двигателем внутреннего сгорания 14 с муфтой-маховиком 15 через зубчатый редуктор 16 и коробку передач 17 (рисунок 1.1).
Двухзвенный
рычажный кривошипно-шатунный механизм
двигателя внутреннего сгорания (рисунок
1.2) преобразует возвратно-поступательное
движение ползуна (поршня) 3 и во вращательное
движение кривошипа 1. Передача движения
от поршня к кривошипу осуществляется
через шатун 2. Цикл движения поршней
включает такты расширения, выпуска,
впуска и сжатия (рисунок 5). Во время
расширения взорвавшаяся в камере
сгорания цилиндра рабочая смесь
перемещает поршень из верхней мёртвой
точки (в.м.т.) в нижнюю мёртвую точку
(н.м.т.). В конце такта расширения
открываются выпускные клапаны и газы
удаляются из цилиндра в выпускную
систему. Работой всех клапанов управляет
кулачковый (распределительный) вал, у
которого угловая скорость такая же, как
у кривошипа. Привод ведущих колёс
осуществляется через коробку передач
и редуктор заднего моста (РМ). Коробка
передач содержит ступень внешнего
зацепления
![]() и планетарную передачу z-H
(рисунок 1.3). Закон движения толкателя
показан (рисунок 1.4). Исходные данные
для проектирования приведены в таблице1.1
и планетарную передачу z-H
(рисунок 1.3). Закон движения толкателя
показан (рисунок 1.4). Исходные данные
для проектирования приведены в таблице1.1
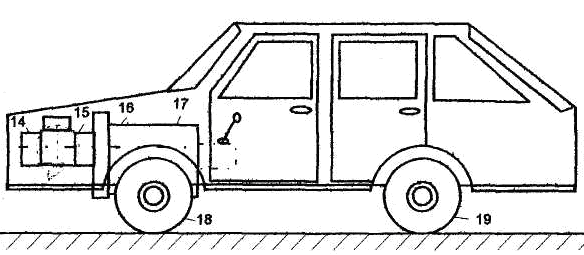
Рисунок 1.1 Легковой переднеприводной автомобиль
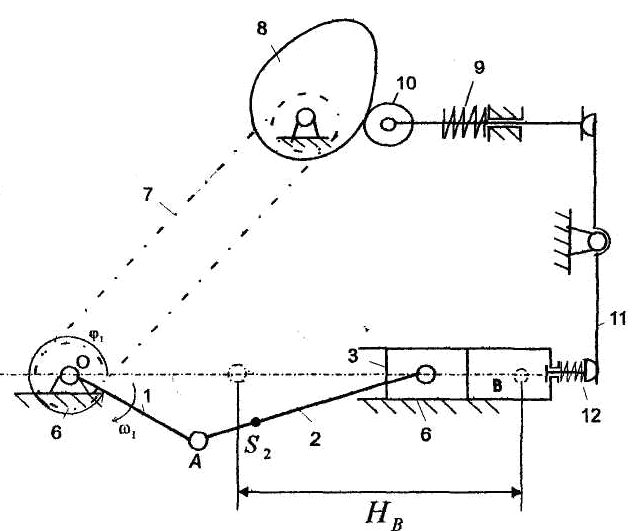
Рисунок 1.2 Исходная схема проекта
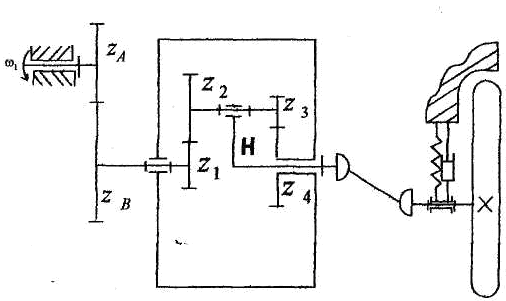
Рисунок 1.3 Схема машинного агрегата
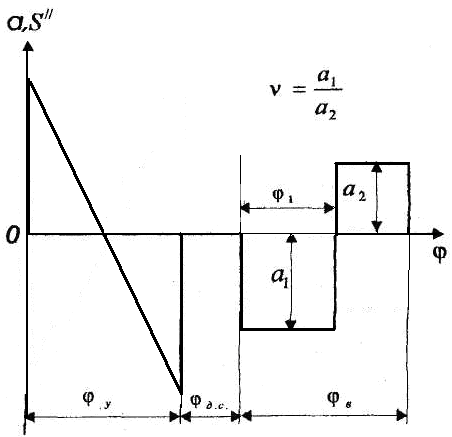
Рисунок 1.4 Закон движения толкателя
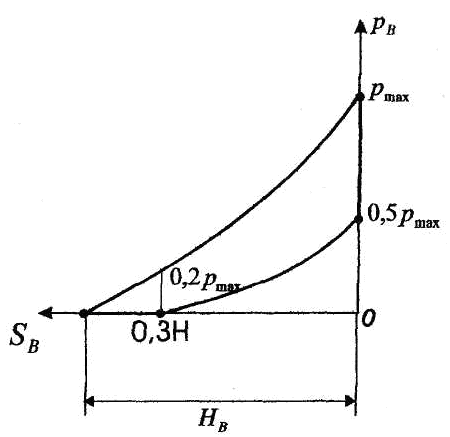
Рисунок 1.5 Индикаторная диаграмма
Таблица 1.1 Исходные данные к курсовому проекту
|
Параметр |
Условные обозначения |
Единицы измерения |
Величина |
Рычажный механизм
|
Диаметр поршня |
d |
м |
0,066 |
|
Отношение хода поршня к его диаметру |
|
– |
1,82 |
|
Максимальный угол давления |
|
град |
11 |
|
Коэффициент неравномерности вращения кривошипа |
|
– |
0,018 |
|
Максимальное давление в цилиндре |
рmax |
МПа |
4,8 |
|
Угловая координата расчётного положения |
φ1 |
град |
120 |
Зубчатая передача
|
Частота вращения кривошипа вала |
n1 |
|
2300 |
|
Число зубьев колёс |
|
– |
12,20 |
|
Модуль зубчатых колёс |
m |
мм |
5 |
|
Частота вращения вала |
nK |
|
230 |
Кулачковый механизм
|
Допустимый угол давления |
|
град |
25 |
|
Ход толкателя |
h |
м |
0,013 |
|
Фазовые углы |
|
– |
61,11 |
|
Номер закона движения толкателя при удалении и возвращении |
C равномерно убывающим ускорением Параболический
|
– |
–
|