

3.2 Структурный анализ рычажного механизма

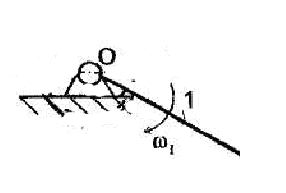
Рисунок 3.1 Схема механизма
Звенья:
1 – кривошип,
2 – шатун,
3 – ползун,
0 – стойка.
Число подвижных
звеньев
![]() .
.
Число звеньев механизма m=4.
Число низших пар
–
![]() .
.
Определим класс кинематических пар:
О (0–1) –вращательная, одноподвижная, 5 класс;
A (1–2) – вращательная, одноподвижная, 5 класс;
B (2–3) – вращательная, одноподвижная, 5 класс;
![]() (3–0) – поступательная,
одноподвижная, 5 класс.
(3–0) – поступательная,
одноподвижная, 5 класс.
Число высших пар
–
![]() ;
;
Так как механизм плоский, то для определения числа степеней свободы используем формулу Чебышева: W=3n–2p5–p4.
Таким образом, получаем следующее число степеней свободы для механизма:
W=3n–2p5–p4=3∙3–2∙4=1.
W=1, то положения всех звеньев механизма определяется заданием одной независимой обобщённой координатой (угол φ1).
Разобьём механизм на группы Ассура и механизм 1 класса:

a) б)
Рисунок 3.2. Структурный анализ механизма
На рисунке 3.2.(а)
изображение является механизмом 1
класса. Механизм на рисунке 3.2(б) группа
Ассура 2 класса, 2 вида, 2 порядка. Наивысший
класс присоединённых групп Ассура –
второй, поэтому механизм относится ко
второму классу. Форма построения
механизма
![]() (0;1)
(0;1)![]() II
(2;3) .
II
(2;3) .
3.3 Метрический синтез определение размеров звеньев рычажного механизма
На рисунке 3.3 изображён механизм в крайних точках положения с указанием хода поршня – H.
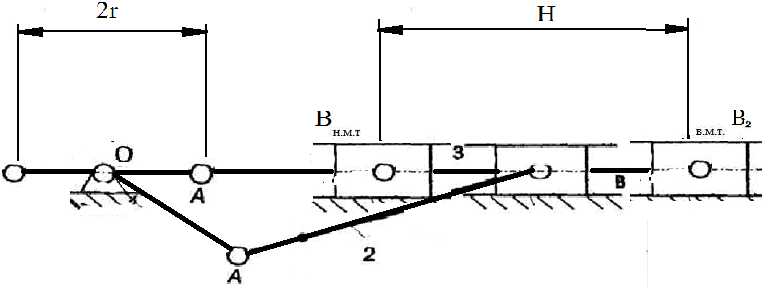
Рисунок 3.3 Механизм в крайних положениях
Найдём длину шатуна:
![]() ;
;
![]()
По заданным частоте
вращения
![]() определим среднюю угловую скорость
кривошипа
определим среднюю угловую скорость
кривошипа
![]() рад/с.
рад/с.
Начальная обобщённая
координата
![]() =180о
дальнего крайнего левого положения на
рисунке 3.3.
=180о
дальнего крайнего левого положения на
рисунке 3.3.
Массово-инерционные параметры механизма:
- массы
![]() ;
;
- шатуна
![]() кг, где q
– масса одного погонного метра длины,
кг/м.
кг, где q
– масса одного погонного метра длины,
кг/м.
- массы кривошипа
![]() кг;
кг;
- поршня
![]() кг;
кг;
- положения
![]() центров масс:
центров масс:
- шатуна
![]() м;
м;
- кривошипа
![]() ;
;
- поршня
![]() ;
;
- осевые моменты инерции:
- шатуна
![]() кг·м2;
кг·м2;
- кривошипа
![]() кг·м2;
кг·м2;
Результаты расчета сводим в табл. 3.1.
Таблица 3.1.
|
Наименование и обозначение параметров |
Размеры,
|
Угловая скорость
|
|
Масса
|
Осевые
моменты инерции |
|||||
|
|
|
|
|
|
|
|
|
|||
|
Численное значение |
|
|
|
|
180 |
|
|
|
|
|
3.4. Определение кинематических характеристик.
3.4.1 Графический метод решения задачи
3.4.1.1 Построение плана положений механизма
Для построения планов положения механизма воспользуемся размерами звеньев, полученных ранее в пункте 3.3.
Так как горизонтальный механизм, то геометрическое место точек всех положений ползуна будет находиться на горизонтальной прямой, проходящей через ось вращения кривошипа, перпендикулярной плоскости чертежа.
Принимается
масштаб построения
![]() м/мм.
м/мм.
Чертежные отрезки:
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
Тат как механизм
второго класса, то построение ведется
геометрическим методом засечек, начиная
от дальнего крайнего положения, которое
обозначается первым (позиция 1 листа
1). Строятся 12 планов положений,
равноотстоящих по углу φ,
поворота кривошипа. Строится траектория
точки S2
шатуна. Выделяется контурной линией
одно расчетное положение №
3 при
![]() .
Для этого положения обозначаются отрезки
координат
.
Для этого положения обозначаются отрезки
координат
![]() и рассчитываются графические координаты
точек и звеньев
и рассчитываются графические координаты
точек и звеньев
Графические координаты для исследуемой схемы:
![]() 342·0,001=0,342м;
342·0,001=0,342м;
![]() 125·0,001=0,125
м;
125·0,001=0,125
м;
![]() 37,5·0,001=0,0375м;
37,5·0,001=0,0375м;
![]() 90;
90;![]() м/мм;
м/мм;