

2.4.5.2 Асутп с цсои, выполняющим информационные функции

Рис. 2.4.5.2.1. Структурная система АСУТС с вычислительным комплексом, выполняющим информационные функции.
Обозначения:
УСО – устройство сопряжения с объектом.
УВВ – устройство ввода/вывода.
Данный вариант АСУТП выполняет все функции, рассмотренные в предыдущем варианте, а такие блоки, как УСО, ВК (ЦСОИ) выполняют следующие функции:
-
Централизованный сбор и первичную обработку информации о состоянии объекта.
-
Вычисление комплексных, технических и технологических параметров.
-
Контроль состояния объекта, а также отображение и регистрация этого состояния.
Для таких вариантов систем ЦСОИ могут осуществлять не только накопление информации о состоянии объекта, но и создавать или уточнять математические модели полученные ранее, до создания автоматизированной системы.
Такого рода вариант АСУТП может являться переходным этапом по созданию более совершенной системы управления реализующей современные подходы к управлению.
2.4.5.3. Асутп с цсои, выполняющим управляемые функции в режиме советника
ЦСОИ берёт более широкие функции управления (см. рис. 2.4.5.2.1.):
-
Анализ состояния объекта;
-
Поиск оптимальных управляющих воздействий, т.е. реализации современного подхода к управлению.
-
Математическая модель:
 ;
; -
Критерий эффективности:
 ;
; -
Ограничения:

Находиться
![]()
Ресурсы такой АСУТП
позволяют не только выполнять
информационные функции, рассмотренные
в предыдущем варианте, но и осуществлять,
на базе выбранного метода поиск
оптимальных управляющих воздействий
(![]() )
для каждого момента времени ti
и представлять управляющему персоналу
значения этих управляющих воздействий
в виде рекомендаций по управлению
процессом.
)
для каждого момента времени ti
и представлять управляющему персоналу
значения этих управляющих воздействий
в виде рекомендаций по управлению
процессом.
В том случае, если
оператор доверяет представленным
рекомендациям, то он, используя пульт
управления и устройство дистанционного
управления, задаёт такие значения
уставок локальных автоматических
регуляторов, которые соответствуют
значениям компонент
![]() .
.
2.4.5.4. Асутп с цсои, выполняющим супервизорное управление
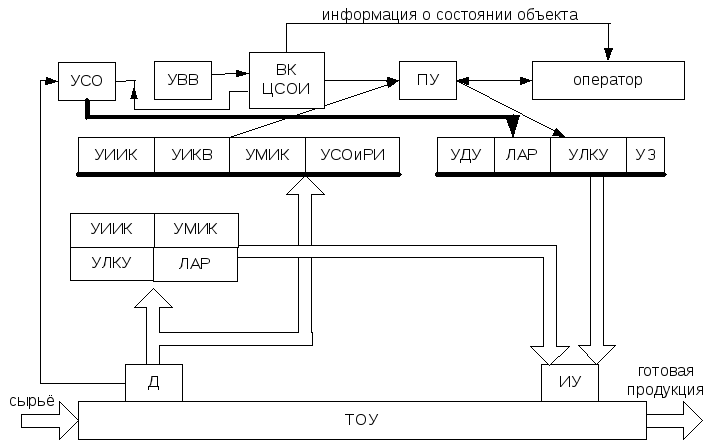
Рис.2.4.5.4.1. Структурная схема АСУТП с ЦСОИ, выполняющим супервизорное управление.
Такой вариант АСУТП
выполняет все функции, которые выполнялись
в предыдущих вариантах АСУТП, но найденный
программно вектор управляющих воздействий
![]() для
данного момента времени уже выдаётся
не в виде рекомендации оператору, а в
виде воздействий на задатчики ЛАР, т.е.
человек в данном контуре управления
уже не используется. Это позволяет
ускорить реализацию управления.
для
данного момента времени уже выдаётся
не в виде рекомендации оператору, а в
виде воздействий на задатчики ЛАР, т.е.
человек в данном контуре управления
уже не используется. Это позволяет
ускорить реализацию управления.
Такая система является наиболее совершенной по отношению к предыдущим вариантам, и она возможна в том случае, если модели объекта, методы оптимизации и в целом алгоритмы управления апробированы и доказана их состоятельность. Такая система обеспечивает оптимизацию работы объекта в статическом режиме или установившемся режиме.
Рассмотренный вариант АСУТП при наличии надёжных средств обработки информации позволяет устранять частично блоки УИИК, УИКВ, УМИК, УСОиРИ.
2.4.5.5. Асутп с цсои, выполняющим непосредственное управление
Такой вариант АСУТП
является наиболее мощным по своим
функциональным возможностям, т.е.
реализует все функции тех АСУТП, которые
были рассмотрены выше, но так же позволяет
оптимизировать работу не только в
установившихся, но и в переходных
режимах. Управляющие воздействия –
вектор![]() в каждый i-й
момент времени передаются из ЦСОИ
непосредственно на ИУ.
в каждый i-й
момент времени передаются из ЦСОИ
непосредственно на ИУ.

Рис.2.4.5.5.1. Структурная схема АСУТП с ЦСОИ, выполняющим непосредственное управление.
Такая система предъявляет наиболее высокие требования к надёжности ЦСОИ, т.к. при выходе компонент ЦСОИ из строя объект полностью не управляется. При наличии надёжных средств ЦСОИ может удалить такие компоненты как ЛАР и УЛПУ.