

4.7.3.2. Математическая постановка задачи оперативно-календарного планирования
Она заключается в
том, чтобы для производственного участка
(цеха) с заданными технологическими
маршрутами обработки деталей (изделий)
Qi1,Qi2,….Qmi
необходимо построить некоторый
календарный план (например, в виде
графиков Ганта) рис.4.7.3.1, удовлетворяющий
определенным (заданным) условиям и
ограничениям и определяющий значения
всех tij,
![]() .
Но т.к.
.
Но т.к.
![]() =
tij+
Tij,
(а Tij
величины известны), то фактически можно
говорить о том, что календарный план
построен, если известны все величины
tij.
=
tij+
Tij,
(а Tij
величины известны), то фактически можно
говорить о том, что календарный план
построен, если известны все величины
tij.
В рамках общего графика можно выделить графики обработки детали или изделия di, которые задают совокупность времен {tij} только для j=1,…m, касающихся одной данной детали (изделия). Например: t11, t12, t13, t14 (рис. 4.7.3.1).
Анализируя задачу составления календарных планов, можно убедиться в том, что существует множество (несколько) графиков Сi, соответствующих сформулированным ранее условиям и ограничениям. Например, запускать детали в обработку можно в различной очередности: G1- 1;2;3, G2 – 3;2;1, G3 – 2;3;1, G4 – 1;3;2. Каждый из этих графиков Gi может обуславливать свое значение критерия эффективности Fi(Gi). Поэтому возникает задача построения некоторого наилучшего графика в соответствии с выбранным критерием F(Gi), определенным на всех графиках Ганта (Gi). Этот критерий ставит в соответствие каждому графику Ганта Gi определенное число Fi(Gi). Если такой критерий построен, то необходимо найти из всех графиков такой график Ганта Gi*, при котором F(Gi*)→extr.
Для различных производственных задач и условий, критерии F могут быть различными, например, в качестве критерия может использоваться:
КЭ 1. Общая стоимость обработки детали на участке (цехе)
![]() ,
m
– число операций; (1)
,
m
– число операций; (1)
КЭ 2. Общее время обработки всех (1,2,…,i,…,n) изделий (деталей).
Тобщ=max{tim}→min, (2)
Где timi – время окончания выполнения всех m операций над i-ой деталью,
i-номер детали, варьируется от 1 до m
j-номер станка, варьируется от 1 до m
Рассмотрим пример ОКП, если в количестве КЭ выбрано общее время обработки всех n деталей (изделий):
tij, Tij, tij где
первый индекс-номер номенклатуры детали
второй индекс- номер станка (операции)

Рис. 4.7.3.1. График последовательности операций (график Ганта).
Tобщ=max{![]() }=t24
, где
}=t24
, где
![]() - время завершения
обработки 1-ой детали;
- время завершения
обработки 1-ой детали;
![]() - время завершения
обработки 2-ой детали;
- время завершения
обработки 2-ой детали;
![]() - время завершения
обработки 3-ей детали.
- время завершения
обработки 3-ей детали.
4.7.3.3. Пример: построения оптимального двухоперационного плана (календарного плана)
Построим план для участка, состоящего из двух станков и при обработке деталей изделий пяти наименовании (изделий или деталей). Выберем в качестве критерия - Тобщ, т.е. общее время, в течение которого завершается обработка всех запланированных для обработки партии изделий (деталей).
Итак, имеется пять видов изделий (n=5), которые должны пройти обработку сначала на первом станке, а затем на втором, т.е. маршрут Мi=>< Oi1, Oi2 >. При этом на одном станке в данный момент может обрабатываться только одно i-е изделие и на каждом станке можно выполнять только одну операцию (т.е. Qij). Каждая операция Oij характеризуется временем выполнения Тij. Надо найти оптимальный вариант плана запуска изделий в обработку, имея в виду минимизацию суммарной длительности обработки.
Тобщ=max{![]() }→min
(2’).
}→min
(2’).
Сведем исходные данные в таблицу 1:
Таблица №1
-
№ детали
Время выполнения операции Оi1 над i-ой деталью на 1-ом станке- Ti1
Время выполнения операций Оi2 над i-ой деталью на 2-ом станке-Ti2
d1
T11=4(О11)
T12=5 (О12)
d2
T21=4(О21)
T22=1 (О22)
d3
T31=30(О31)
T32=4 (О32)
d4
T41=6(О41)
T42=30 (О42)
d5
T51=2(О51)
T52=3 (О52)
Пусть 1-ый график (последовательность) запуска деталей в работу соответствует правилу, что очередность запуска соответствующего номеру детали. Тогда график Ганта для 1-го станка имеет вид:

Т.е. 1-я деталь запускается в обработку 1-ой на 1–ом станке, 2-я деталь-2-ой на 1-ом станке и т.д. На 2-ом станке получается такая же последовательность обработки деталей.
Общее время обработки всех изделий на 1-м станке равно:
![]() =
t1=T11+T21+T31+T41+T51=4+4+30+6+2=46
ед. вр.=
=
t1=T11+T21+T31+T41+T51=4+4+30+6+2=46
ед. вр.=![]()
Обозначим Xij — простой j-го станка пред обработкой i-го изделия. Тогда общее время обработки изделия на втором станке t2 равно:
ti2=t2=Х12+T12+T22+Х32+T32+Х42+T42+T52=4+5+1+28+4+2+30+3=77
ед. вр.=
![]()
Следовательно, Тобщ=мах{ti2}=наибольшей {46,77}=77 ед. вр.
Алгоритм нахождения оптимального календарного плана
-
Запишем время выполнения всех операций в порядке возрастания номеров номенклатур деталей (см. таблицу №1).
-
Просмотрим все продолжительности обработки Тij и найдем среди них наименьшую, т.о. min{Tij}=T*ij.
-
Если она относится к первому станку, т.е. j=1 для T*ij, то расположим ее во второй таблице (T2) эту номенклатуру (вид) детали (т.е. i-ю строку табл.1) в первой верхней пустой строке. Табл. 2.
-
Если эта длительность относится ко второму станку, т.е.j=2, то расположить во второй таблице эту номенклатуру детали (i- ю строку табл. 1) в последней нижней пустой строке. Табл. 2.
-
Вычеркнуть эту строку в таблице №1, т.е. не рассматривать ее в последующем.
-
Повторить операции начиная со второй в отношении оставшихся величин Тij в табл. 1.
-
Если попадаются равные числа, то для определенности изделие или деталь с номером номенклатуры изделия меньшим индексом располагается в таблице №2 первой.
Таблица №2. j=1 j=2
-
Изделие
Ti1
Ti2
d5
T51
T52
2 шаг
d1
T11
T12
3 шаг
d4
T41
T42
4 шаг
d3
T31
T32
4 шаг
d2
T21
T22
1 шаг
График запуска деталей в работу:
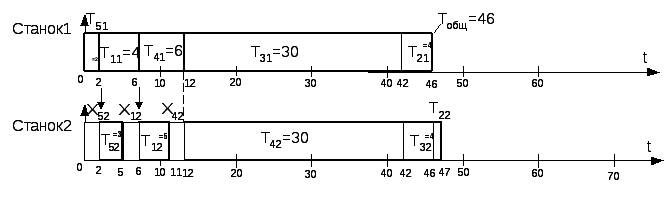
![]() ;
;
![]() ед.
вр.
ед.
вр.
Tобщ=max{
![]() }=X52+T52+X12+T12+X42+T42+T32+T22=47.
}=X52+T52+X12+T12+X42+T42+T32+T22=47.
Таким образом второй график Ганта (календарный план) имеет значительно меньшее значение общего времени обработки изделий.