

4. Алгоритмическое обеспечение аиус
-
Общие вопросы алгоритмизации
В числе основных функций, которые обычно выполняются в АИУС, можно назвать следующие:
-
сбор данных, первичная обработка и регистрация;
-
контроль и анализ текущего состояния объекта;
-
решение задач идентификации объекта;
-
формирование рекомендаций по управлению объектом для оператора;
-
формирование управляющих воздействий на исполнительные устройства;
-
решение задач оптимального управления технологическими объектами, либо оперативно-календарного планирования производственными процессами.
Каждая из 6 функций реализуется в АИУС в соответствии с алгоритмом или группой алгоритмов. Поэтому при проектировании АИУС для обеспечения эффективной разработки ПО системы создается АО, которое и представляет собой комплекс алгоритмов, реализуемых в темпе с процессом (в реальном масштабе времени) с целью выполнения отработки функции АИУС.
Поскольку алгоритмов для конкретной АИУС может быть большое количество (от нескольких десятков до сотен) и они могут отрабатываться 1)либо через заданные интервалы времени, 2)либо при возникновении определенных ситуаций на объекте, то кроме всего прочего возникает необходимость в проведении оценок возможности их совместного функционирования с целью выявления и устранения возможности задержек в выполнении тех или иных алгоритмов, а также выявления и устранения к неправильной отработки каких-либо алгоритмов под влиянием других алгоритмов.
Алгоритм АИУС – совокупность правил (действий, инструкций), реализуемых в ВК (ЦСОИ) и обеспечивающих преобразование исходных данных или данных о состоянии объекта, в искомый результат, т.е. либо в управляющее воздействие на объект, либо в информацию, используемую управляющим и производственным персоналом.
Поскольку АО различных АИУС существенно отличаются друг от друга, что обусловлено:
-
многообразием типов объекта управления (ОУ);
-
многообразием задач и функций, реализуемых в АИУС;
-
многообразием аппаратных средств, используемых для создания АИУС;
то систематизация, классификация АО АИУС, анализ и изучение всех разновидностей алгоритмов весьма сложная задача. Однако можно выделить так называемые типовые алгоритмы, которые применяются практически во всех АИУС. К таковым можно отнести:
-
алгоритмы сбора и первичной обработки данных:
1.1. циклический и адресный опрос датчиков;
1.2. определение истинных значений измеряемой величины по показаниям датчиков;
1.3. распознавание и определение аварийных ситуаций на объекте.
2) алгоритмы цифрового управления и регулирования:
2.1. алгоритмы программно-логического управления (ПЛУ);
2.2. релейное регулирование с обратной связью;
-
регулирование по различным законам (П, ПИ, ПИД) с обратной связью.
3) алгоритмы оптимального управления и оперативно-календарного планирования.
Рассмотрим некоторые алгоритмы из каждой группы.
4.2. Алгоритмы сбора, первичной обработки данных и контроля состояния объекта
Эти алгоритмы обычно являются составной частью АО АИУС, либо выступают как самостоятельное АО для АСНИ. При сборе данных о состоянии объекта можно использовать адресный опрос и циклический опрос датчиков.
Вариант циклического опроса датчиков является наиболее распространенным, и в этом случае все датчики системы разделяются на группы и для каждой из групп задается интервал или период опроса Топр.j. При этом датчики в каждой группе опрашиваются в строго определенной последовательности, и информация о показаниях датчиков фиксируется в памяти ВК (ЦСОИ).
При этом обычно после считывания показаний датчиков Х, они пересчитываются в технологические (физические величины) Y по различным правилам (формулам). Далее эти фактические значения технологических (физических) параметров объекта сравниваются с заданными регламентными пределами с целью выявления нештатных ситуаций.
Рассмотрим пример упрощенного алгоритма циклического опроса группы датчиков, первичной обработки их показаний и контроля состояния объекта.
Пусть задано количество датчиков n и Топр.j период опроса.
Сигналы, которые выдает каждый из датчиков: х1,х2,…,xi,…,xn.
Технологические параметры, которые контролируются датчиками:y1,…,yn.
Предположим, для
упрощения, что 1) алгоритм пересчёта
показаний датчиков x
в y
реализуется формулой: yi=ki![]() (
(![]() ),
2) известны также регламентные пределы,
в которых должны находиться параметры
[
),
2) известны также регламентные пределы,
в которых должны находиться параметры
[![]() ],
3) известен алгоритм пересчета номера
датчика в адрес подключения к ЦСОИ (см.
рис. 4.2.1),.
],
3) известен алгоритм пересчета номера
датчика в адрес подключения к ЦСОИ (см.
рис. 4.2.1),.

Рис.
4.2.1. Регламентные пределы величины y.Эти
все данные заранее записаны в памяти
компьютера.
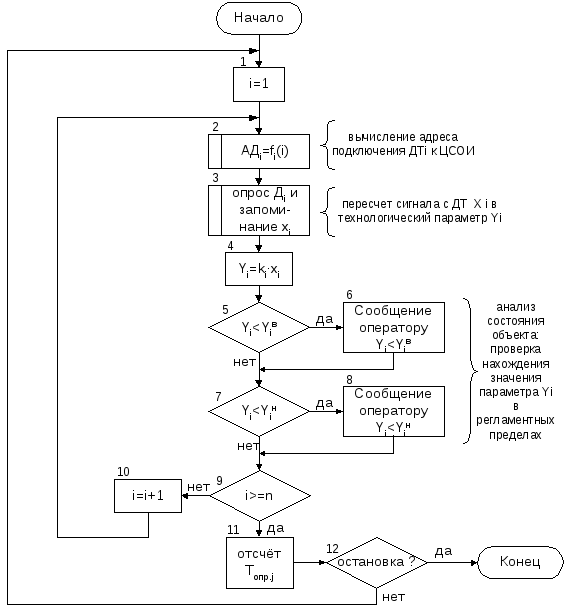 Рис.
4.2.2. Схема алгоритма сбора, первичной
обработки и контроля состояния объекта
(циклический опрос i-ой группы датчиков
с периодом опроса Топр
j
).
Рис.
4.2.2. Схема алгоритма сбора, первичной
обработки и контроля состояния объекта
(циклический опрос i-ой группы датчиков
с периодом опроса Топр
j
).