

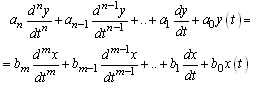
1.Математическое описание. Уравнения статики и динамики. Линеаризация.
Любой процесс или объект можно описать дифф или разностными уравнениями. Ур-е динамики описывает процессы в системе при произвольных вх воздействиях в течение времени. Ур-е статики описывает процессы в системе при постоянных вх воздействиях в установивш режиме. В основном системы описыв нелинейн дифф ур-ями, что затрудняет исследование системы и объекта.
Замена нелинейного ур-я линейным назыв линеаризацией.
Общий вид линейной системы автоматического управления
В реальных условиях большинство элементов автоматической системы являются не линейными.
2. Устойчивость импульсных сау
Для линейной системы необходимо что бы корни ХУ располагались слева от мнимой оси
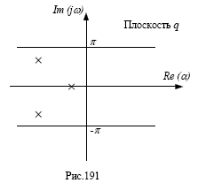
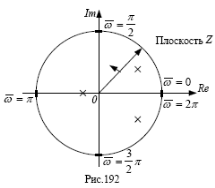
Применив Z преобразование для устойчивости системы необходимо что бы корни ХУ находились внутри единичной окружности Z=epT
После омега преобразований используя ПФ разомкнутой и замкнутой системы можно применить алгебраические критерии для оценки устойчивости импульсной системы после перехода в область псевдочастот можно использовать частотные критерии, а так же исследовать устойчивость систем при помощи ЛАХ и ЛФХ. Пусть задана ПФ замкнутой импульс. сист.
![]() в
нормированной форме:
в
нормированной форме:
![]() Знаменатель
полином вида:
Знаменатель
полином вида:
![]() Система
будет устойчива если все корни ХУ
записанные в виде eqνt
будут стремится к 0. Это возможно, но
если все действительные части Reqν<0,
тогда все корни полинома
Система
будет устойчива если все корни ХУ
записанные в виде eqνt
будут стремится к 0. Это возможно, но
если все действительные части Reqν<0,
тогда все корни полинома
![]()
Z<1 Z=ea
Должны быть меньше 1
Билет №19
1 Классификация систем управления
По принципу управления (регулирования):
-разомкнутые;
-замкнутые;
-комбинированные.
По цели управления:
-системы стабилизации(постоянно поддерживает выходной сигнал на одном уровне);
-системы программного управления(упр возд может изм по установл закону);
-следящие системы(изм управл сигнал в зависимости от внешних явлений);
По виду передаваемых сигналов:
-непреывные
-импульсные
-релейные
-цифровые
По способу математического описания
-линейные
-нелинейные
По виду контролирования изменении своих свойств.
-неприспосабливаемые сист.
-адаптивные системы
-самонастраевыемые системы
-самоорганизующиеся системы(изменяют свою структуру)
В следящих системах упр сигнал формируется в зависимости от состояния системы.
Статические системы:

В статич системах в установивш сост присутствует постоянная ошибка e-разница м/у вх и вых сигналом.
Астатические системы:

В установивш режиме разница м/у вх и вых сигналом равна нулю.
2 Передаточные функции разомкнутой и замкнутой импульсной сау
Разомкнутая система. На вход подается воздействие х(t) на выходе получаем y[n] экстраполятор и непрерывная часть описывается ф-ией омега в момент съема импульса t=n на выходе импульсной системы получаем
![]() промежуток
между импульсами
промежуток
между импульсами
![]()
Если Z преобразованию ф-ий x,y,ω, соотв равны x(z),y(z),W*(z), ω(z), то сигнал на выходе будет описываться
![]()
![]()
Если Z преобразование заменить дискретным преобразованием то выходной сигнал запишется как.
![]()
![]()
![]()
![]()
Их наз. ПФ разомкнутой системы.
ПФ замкнутой системы

И.э. импульсный элемент
W непрерывная часть системы кот вкл в себя ПФ фильтра Wпф и ПФ линейной части Wл.
При ε=0 Wε замкнутой системы для входной переменной
![]()
![]()
Чтобы получить выражение для З.С. в любой момент времени ε≠0 подставим G*(q,0) вместо входного сигнала X*вх(q,ε) получим выражение.
![]()
![]()
Билет 20
1. Совокупность операций управления называют процессом управления. Совокупность технических устройств называются объектом управления. Совокупность средств управления и объекта управления образуют систему управления. Законы изменения управляющего воздействия называют алгоритмом управления. Алгоритм управления будет зависеть от алгоритма функционирования, динамических свойств и характеристик объекта. Существует 3 основных алгоритма управления, в основе которых лежат следующие принципы
1)принцип разомкнутого управления. Сущность принципа состоит в том, что алгоритм управления строится только на заданном алгоритме функционирования и не контролируется по фактическому значению выходной величины.
![]() ЗАФ-
заданный алгоритм функционирования
ЗАФ-
заданный алгоритм функционирования
УУ- устройство управления
ОУ- объект управления
u- входное управляющее воздействие
f- возмущающее воздействие
x- выходная величина
2)принцип обратной связи- управление по отклонению
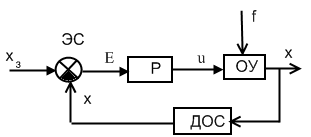 Р-
регулятор
Р-
регулятор
ДОС- датчик обратной связи
Хз- заданное значение управляющей величины
![]() -элемент сравнения
-элемент сравнения
Р-регулятор
![]()
Управляющее
воздействие является функцией отклонения
![]() выходной
величины х от её заданного значения.
Функция f
должна быть неубывающей ф-ей и одного
знака с
выходной
величины х от её заданного значения.
Функция f
должна быть неубывающей ф-ей и одного
знака с
![]() .
.
Ф-я f называется регулированием по отклонению. Устройство управления в данном случае называют автоматическим регулятором. Объект управления называют объектом регулирования. Вся система называется системой автоматического регулирования.
Регулятор- вырабатывающий воздействие и в соответствии с алгоритмом управления по отношения к объекту образует отрицательную обратную связь.
![]() -отклонение
(ошибка управления).
-отклонение
(ошибка управления).
3)принцип компенсации (регулирования по возмущению).
![]()
![]() Д-
датчик измерения возмущающего воздействия
Д-
датчик измерения возмущающего воздействия
Р- регулятор возмущения
Д-датчик измерения возмущающего воздействия
Отклонение
регулируемой величины зависит как от
управляющей величины u,
так и от возмущения f.
Тогда закон управления F2
м. сформулировать таким образом, чтобы
в установившемся режиме отклонение
отсутствовало
![]()
Самым эффективным принципом управления является управление по возмущению, но обладает след. недостатками- трудность измерения возмущ. воздействий. на практике используют комбинированное управление, т.е. те возмущения, к-е м. компенсировать упр-ся по принципу компенсации, а остальные по принципу обратной связи.
2.Дискретное преобразование Лапласа и z-преобразования.
Для решетчатых функций по аналогии с непрерывными функциями введено понятие дискретного преобразование Лапласа, которое осуществляется по формуле:
![]()
Если в эту формулу подставить Z=eТР, то получим z-преобразование Лапласа
![]()
Билет 21
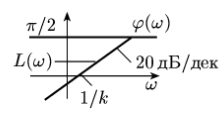
Элементарные типовые звенья. Идеальное дифференцирующее звено.
Дифференцирующее звено. Так называют звено с передаточной функцией W(s) = ks. Его частотные и временные функции имеют следующий вид:

АФЧХ:
![]()
ЛАХ, ЛФХ:
Критерии оптимизации управления.
Согласно концепция, возложенной во введении, центральной задачей современной теории автоматического управления (СТАУ) является оптимизация управления «в большом» для оптимального достижении на каждом этапе функционирования системы главной цели при соблюдении множества ограничении. Такая оптимизация возможна при выражении главной цели (или главной цели и ограничений) в виде минимизируемого функционала или целевой функции. Функционалы и функции, выражающие цель управления и ограничения, именуются также критериями оптимизации.
Назначение минимизируемого функционала, критериев оптимизации для каждого этапа и эксплуатационного (п, возможно, аварийного) режима системы является самой важной частью задачи оптимизации. Эта часть проблемы не может целиком решаться формализованными методами. Она требует глубокого проникновения в существо управляемых пpoцессов, общую ситуацию в «глобальное» назначение систем как составные части более общей метасистемы. Достигается это творческой деятельностью проектировщика (па стадии проектирования) и человека оператора (при выборе п задании функционала для очередного этана функционирования системы).
С точки зрения абстрактно-математической теории управления это считается трудностью, чуть ли не обесценивающей оптимизационный подход. С точки зрения прикладной СТАУ это неизбежное и в целом положительное качество, придающее гибкость методу и способствующее использованию интеллектуального потенциала, таланта конструктора и человека-оператора.
Билет 22