

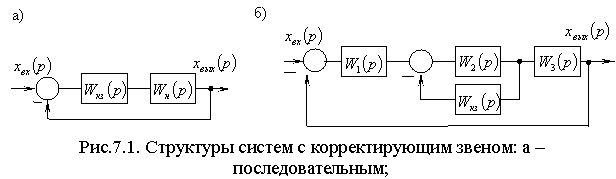
Последовательные корректирующие звенья
Последовательные
корректирующие звенья, как это следует
из их названия, вводятся в систему
последовательно со звеньями исходной
нескорректированной системы (рис. 7.1,
а). При этом передаточная функция
разомкнутой скорректированной
системы
![]() равна:
равна:
![]() ,
(7.1)
,
(7.1)
 где
где
![]() -
передаточная функция нескорректированной
системы.
-
передаточная функция нескорректированной
системы.
Параллельные корректирующие звенья
Параллельные корректирующие звенья вводятся в каналы дополнительных местных обратных связей (рис. 7.1, б). В этом случае передаточная функция разомкнутой скорректированной системы равна:
![]() ,
(7.2)
,
(7.2)
где
![]() –
передаточные функции звеньев
нескорректированной системы, соответственно
охваченные и неохваченные корректирующей
обратной связью.
–
передаточные функции звеньев
нескорректированной системы, соответственно
охваченные и неохваченные корректирующей
обратной связью.
Для системы (рис. 7.1, б) указанные передаточные функции равны:
![]() .
.
2. Основные различия между линейными и нелинейными системами.
1.В лин. системах применим метод суперпозиции.
В нелин. Системах метод суперпозиции не применим.
2. Устойчивость лин. систем зависит только от свойств самой системы и не зависит от величины самого сигнала.
В нелинейных системах устойчивость определяется параметрами системы, нач. условиями и амплитудой входного сигнала. Устойчивость нелинейной системы оценивают по 3 признакам:
– устойчивость в малом – это устойчивость системы при бесконечно малых отклонениях от исходного режима. При чуть больших отклонениях система становится неустойчивой.
– система устойчива в большом, если система устойчива при бесконечно больших отклонениях, которые возможны в данной системе. При малых система может быть неустойчива.
– система устойчива в целом, если система устойчива при любых воздействиях.
3. В линейных системах при отсутствии внешнего воздействия никогда не возникает установившееся колебание (автоколебание). Данное колебание возможно только в системе, которая находиться на границе устойчивости, но данное состояние неустойчивое. Малое изменение параметров системы может привести к неустойчивому, либо к устойчивому состоянию.
В нелинейных системах характерны автоколебания которые вызваны только свойствами самой системы, т.е. не являются реакцией на внешнее воздействие. При этом может быть несколько автоколебательных режимов с различной амплитудой и частотой.
Билет 26
Построение желаемой ЛАХ.
Низкочастотный диапазон
Если задан Кж и порядок астатизма ν

Если известны Dω Dε. ων= Dω ωε=корень из Dε
Через частоту ων проводим линию с наклоном -20 дб/дек через точку ωε -40 дб/дек. ЛАХ начинается в линии -20 переходит в наклон -40 в точке пересечения

В средних частотах по диаграмее солодовникова определяют частоту среза через точку среза проводят отрезок с наклоном -20 дб/дек. Величина этого участка определяется необходимым запасом устойчивости по амплитуде и по фазе

В области высоких частот желаемую ЛАХ строят параллельно неизменяемой
Средне и низкочастотные участки соединяют линией -40 дб/дек кот начинается в начале среднечастотного участка. При соединении высочастотного и среднечастотного вводят линии т.о что бы наклон на участкахне отличался друг от друга не более чем на 40 дб.