

1.Основные понятия и определения тау
Система автоматического управления (рис 1.1) содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
![]()
Под ОУ в данном курсе понимается любое техническое устройство (станок, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значению выходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).
Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействие хвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений.
2. Управляемость и наблюдаемость
Наблюдаемость Под наблюдаемостью понимается возможность косвенного определения величин на основании измерения некоторых других параметров и использовании априорной информации. Наблюдаемость можно рассматривать как в пространстве состояния так и в пространстве сигнала. Пусть сигнал описывается д.у. x’=f(u,x,t). U(t)- известная ф-ия времени определяет входное воздействие. x принадлежит пространству состояний уравнение наблюдения для данной системы z=h(x,u,t) размерностью n заданная ф-ией f и h могут дифференцир по всем аргументам необходимое количество раз. Введем оператор дифференцирования.
![]()
тогда z=h, z=L(h)=Lh, zn-1=Ln-1h
Эти выражения рассматривая относительно переменных состояния х при заданных параметрах z. Тогда условие полной наблюдаемости по калману
rank
![]()
Условие не полной наблюдаемости записывается след образом
rank
![]()
Структурная схема вполне наблюдаемой сист.
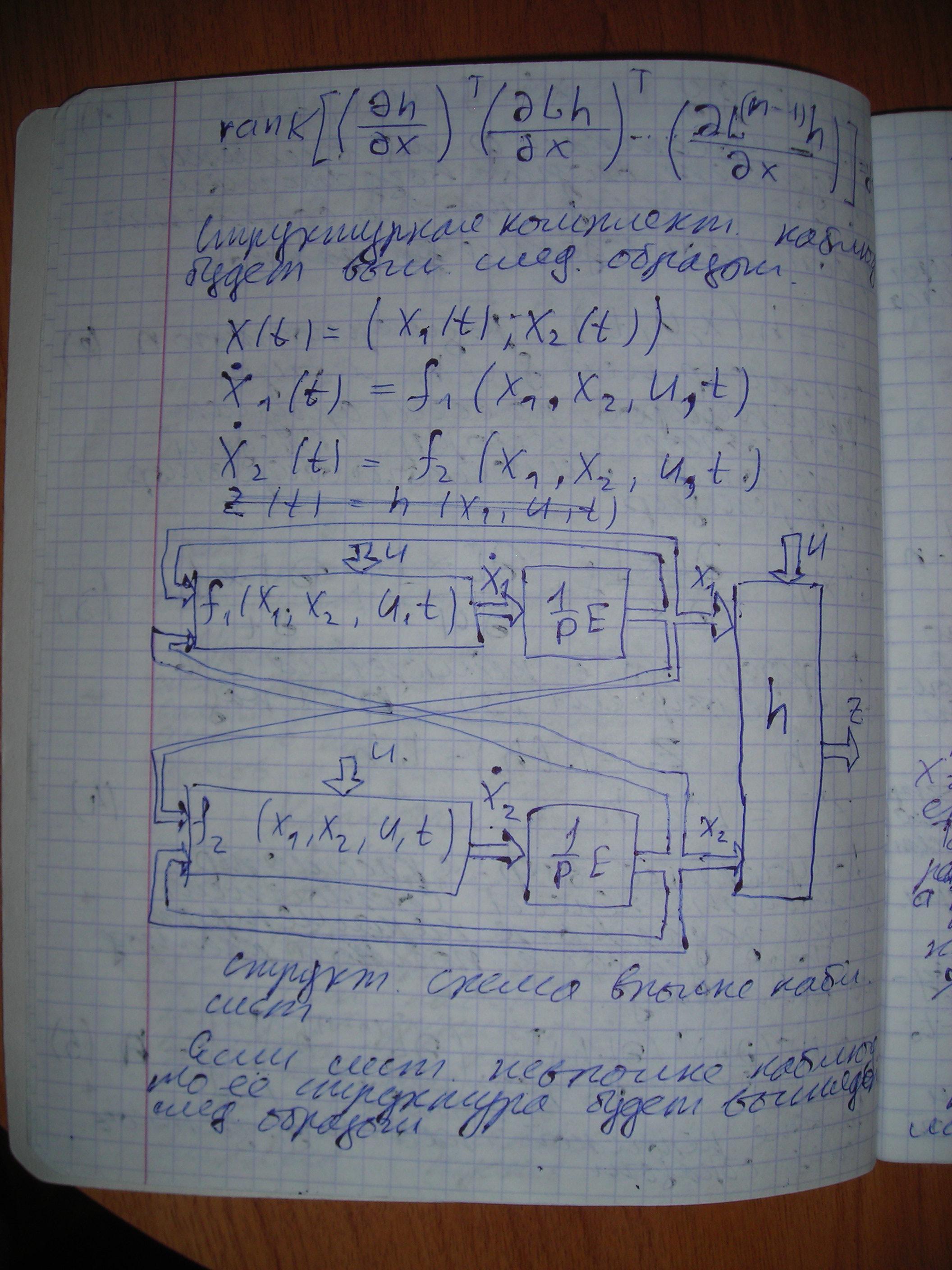
Структурная схема не вполне наблюдаемой системы
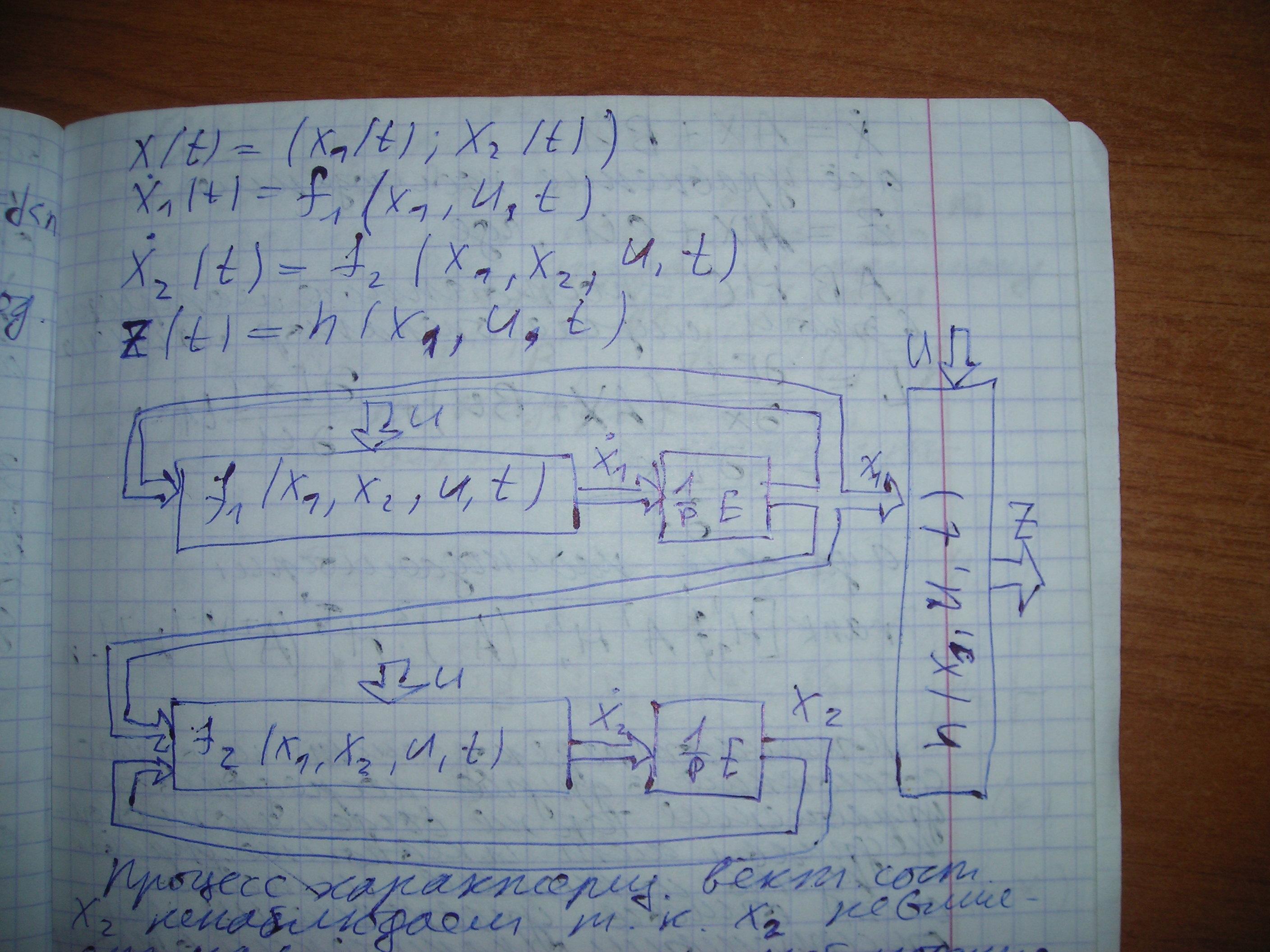
Процесс характеризующий вектор состояния X2 ненаблюдаем т.к.X2 не влияет на выход системы наблюдения. Тогда из условия неполной наблюдаемости размерность вектора х1-d , а размерность х2-(n-d) система в этом случае наблюдаема не более чем на d/n.
Управляемость Под управляемостью понимают переход системы их одного состояния в другое посредством управления. Выделяют вполнеуправляемые системы и невполнеуправляемые системы.
Управляемость по Каллману
Если для производных существует управление U(t)переводящее систему за конечное время t1-t0. из состояния Х(t0)=X0 в состояние Х(t1)=X1, то система называется вполнеуправляемой.
Необходимое и достаточное условие имеет вид
Rank[B;АВ;A(2)B;…A(n-1)B]=n если данное условие не выполняется то система не вполне управляема и её управляемость будет равна Rank[B;АВ;A(2)B;…A(n-1)B]=q
q-степень управляемости. Разобъем вектор Х на 2 субвектора
 если
среди всех возможных разбиений на блоки
А21=0
В21=0
В22=0
или А12=0
В11=0
В12=0,
то система вполне управляема по калману.
если
среди всех возможных разбиений на блоки
А21=0
В21=0
В22=0
или А12=0
В11=0
В12=0,
то система вполне управляема по калману.

Билет 23
Точность и качество импульсной САУ
Общее изображение ошибки
![]()
![]()
Ex(z) Ef(z)
Ex(z)-ошибка по управляющему воздействию
Ef(z)-ошибка по возмущающему воздействию
Если f=0
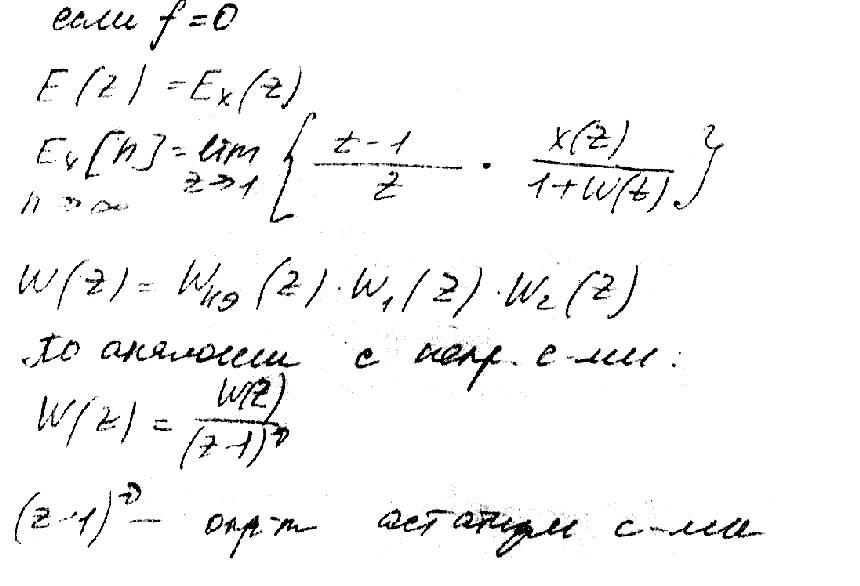
решт. функция ошибки записывается так:
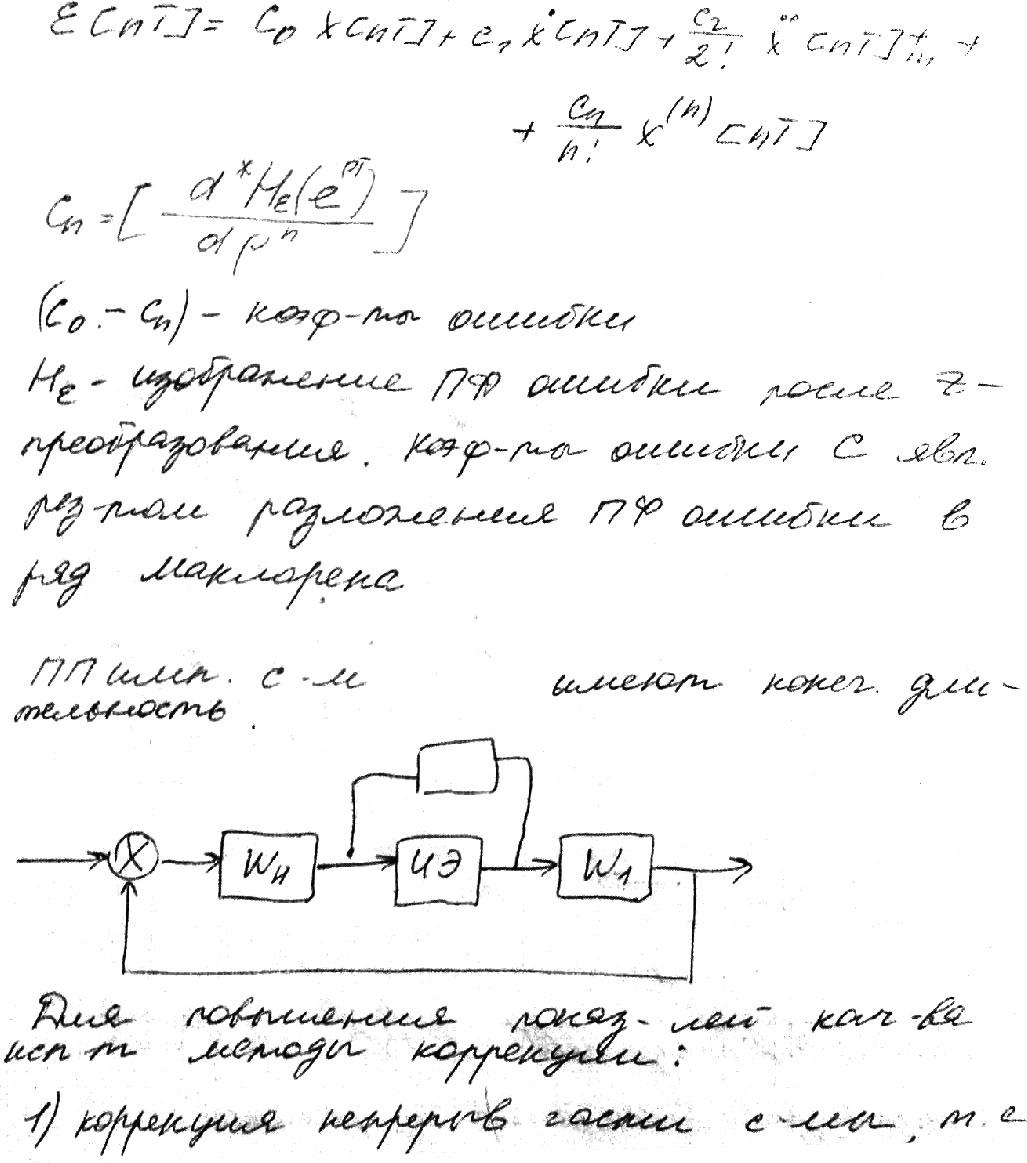
Производиться расчет корректирующего устройства для лин. части системы
2) методы тип. Коррекции произв. расчет импл. кор. устройств.