1.Устойчивость линейных систем.
Под действием возмущений управ-я вел-на отклоняется от заданного состояния. В ответ на это УУ (регулятор) формирует управл-е воздействие на объект стремясь вернуть регулир-ую величину к заданному значению. В результате совместного действия управл-его и возм-его воздействий в системе происходит переходный процесс. Возможны 4 варианта его протекания: 1) с течением времени управл-я велич. возвращается с некоторой точностью в заданное равновесное состояние. Такой переходный процесс назыв. сходящимся, а система устойчивой.
Г еометр.
интерпретация системы:
еометр.
интерпретация системы:

2) Система не может восстановить равновесное состояние. Управляемая вел-на все больше удал-ся от заданного значения. Такой перех. процесс назыв. расходящимся, а система не устойчивой.
Г еометр.
интерпр.
еометр.
интерпр.

3 )
Пограничный между 1и2. В системе возникают
незатухающие колебания регулируемой
величины. Такой перех. процесс назыв.
незатух-им колебат., а система считается
находящимся на границе устойчивости.
)
Пограничный между 1и2. В системе возникают
незатухающие колебания регулируемой
величины. Такой перех. процесс назыв.
незатух-им колебат., а система считается
находящимся на границе устойчивости.
Г еометр.
интерпр.
еометр.
интерпр.








 4)
В системе не возникает переходного
процесса. Значение управл. переменной
остается на том же уровне при котором
оно достигло под действ. возмущения.
Это будет нейтрально устойчивая система.
4)
В системе не возникает переходного
процесса. Значение управл. переменной
остается на том же уровне при котором
оно достигло под действ. возмущения.
Это будет нейтрально устойчивая система.

Вывод: устойчивость- это способность САУ возвращаться с некоторой точностью в заданное равновесное состояние после того как она была выведена из него в результате какого-либо воздействия. Более точная математ-я формулировка понятие точности принадлежит А.А. Ляпунову. Def невозмущенное движение y(t) (установив. режим) будет устойчивым если для любого наперед заданного положительного числа δ как бы оно мало не было можно выбрать другое положит. число λ(δ) такое что для любого возмущения удовлет. условию: Σni=1Δ2fio< λ(δ), то возмущенное движение будет удовлет. условию Σni=1Δ2yi<δ начиная со времени t>t0. Геометр. это выглядит так:
Э та
формулировка отражает то что при
нарушении равновесия абсолютная величина
отклонения управляемой переменной
та
формулировка отражает то что при
нарушении равновесия абсолютная величина
отклонения управляемой переменной
должна по истечению достаточно длительного промежутка времени стать меньше некоторого заранее заданного числа δ. Понятие устойчивости можно сформулировать: линейное САУ назыв. устойчивой если ее выходная величина остается огран. при любых ограниченных по величине возмущениях. Следует отметить что геометр. интерпретация устойчивости соотв. линейным системам. Реальные системы как правило не линейны и характер устойчивости САУ может иметь след. вид:
О пределение
устойчивости САУ:
а) прямые т.е путем решения диф. ур.
системы и анализа системы, б) по корням
харак-го
пределение
устойчивости САУ:
а) прямые т.е путем решения диф. ур.
системы и анализа системы, б) по корням
харак-го
уравнения, в) с помощью критерия устойчивости.
2. Критерии устойчивости. Критерий Гурвица.
Устойчивость – свойство САУ возвращаться в заданный или близкий ему установившийся режим после какого-либо воздействия.
САУ устойчива, если переходные процессы в ней затухающие, выходная величина является ограниченной при условии, что входная величина также ограничена.
Критерий устойчивости Гурвица:
Пусть D(p) = a0pn + a1pn-1 + … + an, тогда:
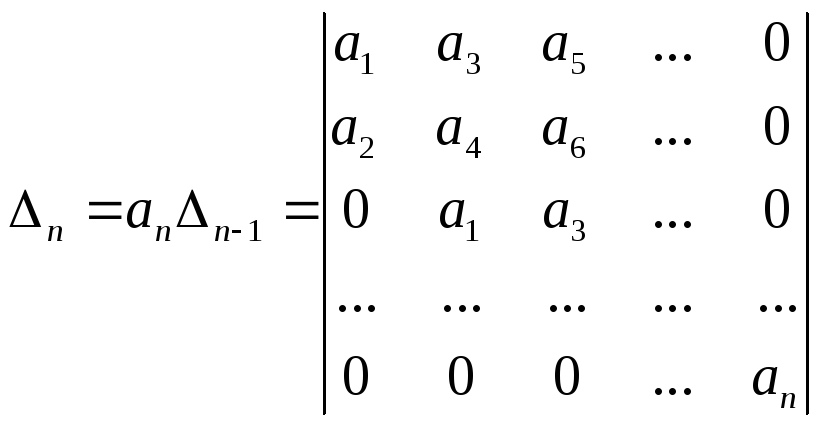 -
определитель Гурвица
-
определитель Гурвица
Для того, чтобы система была устойчива необходимо и достаточно, чтобы ∆n и все его миноры были положительны при a0>0.
2. Принцип максимума Понтрягина. Если (x*(t), u*(t), t*0, t*1) - оптимальный процесс для задачи (9)-(12), то найдутся множители Лагранжа, и (t), не равны одновременно нулю и такие , что для функционала (13) выполняется
Уравнения Эйлера
![]() (14)
(14)
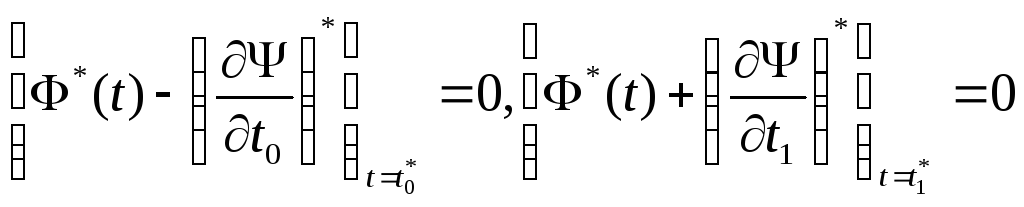
Условия трансверсальности по x:
![]() Условия
трансверсальности по t:
Условия
трансверсальности по t:
Принцип максимума по u:

Условия согласованности знаков с соотношениями : если при некотором j в соотношении (11) (или при некотором s в (11)) стоит знак <, то соответствующееj≥0 (s≥0); при тех j и s, у которых в соотношениях (10) и (11) стоят знаки равенства, знаки j и s могут быть произвольными;
Условия дополняющей нежесткости:
Билет 8
Типовая структура замкнутой САУ, передаточная функция и характеристическое уравнение разомкнутой системы.
![]()
![]() –передаточная
функция разомкнутой системы.
–передаточная
функция разомкнутой системы.
Для линейных систем применим принцип суперпозиции воздействий (независимых воздействий).
![]() - Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.
- Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.
![]()
![]() –передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
![]() –передаточная
функция разомкнутой системы
–передаточная
функция разомкнутой системы
![]() –Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
–Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
Для нахождения характеристического уравнения замкнутой системы необходимо также приравнять к нулю знаменатель передаточной функции замкнутой системы
![]()
Характеристическое уравнение замкнутой системы может быть получено приравниванием к 0 суммы числителя и знаменателя передаточной функции разомкнутой системы.
2. Под оптимальной системой понимается наилучшая в известном смысле система. Для того, чтобы среди возможных вариантов системы найти наилучший, необходим некоторый критерий, характеризующий эффективность достижения цели управления. Этот критерий должен быть выражен в виде строгого математического показателя — критерия оптимальности, который бы однозначно характеризовал любой из возможных вариантов реализации системы. Каждому варианту исполнения системы в этом случае может быть поставлено в соответствие некоторое число. Наилучшим вариантом системы при этом следует считать тот, который даёт в зависимости от конкретной задачи и принятого критерия оптимальности минимальное или максимальное (в зависимости от цели управления) значение критерия.
Оптимальная система, система автоматического управления, обеспечивающая наилучшее (оптимальное) с некоторой точки зрения функционирование управляемого объекта. Его характеристики и внешние возмущающие воздействия могут изменяться непредвиденным образом, но, как правило, при определённых ограничениях. Наилучшее функционирование системы управления характеризуется т. н. критерием оптимального управления (критерием оптимальности, целевой функцией), который представляет собой величину, определяющую эффективность достижения цели управления и зависящую от изменения во времени или в пространстве координат и параметров системы. Критерием оптимальности могут быть различные технические и экономические показатели функционирования объекта: кпд, быстродействие, среднее или максимальное отклонение параметров системы от заданных значений, себестоимость продукции, отдельные показатели качества продукции либо обобщённый показатель качества и т.п. Критерий оптимальности может относиться как к переходному, так и к установившемуся процессу, либо и к тому и к др. Различают регулярный и статистический критерии оптимальности. Первый зависит от регулярных параметров и от координат управляемой и управляющей систем. Второй применяется тогда, когда входные сигналы — случайные функции или (и) нужно учесть случайные возмущения, порождённые отдельными элементами системы. По математическому описанию критерий оптимальности может быть либо функцией конечного числа параметров и координат управляемого процесса, которая принимает экстремальное значение при оптимальном функционировании системы, либо функционалом от функции, описывающей закон управления; при этом определяется такой вид этой функции, при котором функционал принимает экстремальное значение. Для расчёта О. с. пользуются принципом максимума Понтрягина либо теорией динамического программирования.
Билет 9
1. Существует 3 осн. вида соединения звеньев:
-последовательное –параллельное -обратной связи
1) Так называется соединение, при котором выходная переменная предшествующего звена является входной переменной последующего звена
![]()
При последовательном соединении передаточные функции отдельных звеньев перемножаются, и при преобразовании структурных схем цепочку из
последовательно соединенных звеньев можно заменить одним звеном с передаточной функцией
![]()
2)Так называется соединение, при котором на входы всех звеньев подается одно и то же воздействие, а их выходные переменные складываются
![]()
При параллельном соединении звеньев передаточные функции складываются, и при преобразовании их можно заменить одним звеном с передаточной функцией
![]()
Если выход какого-либо звена
поступает на сумматор с отрицательным знаком, то передаточная
функция этого звена складывается с отрицательным знаком, т.е. вычитается
3) Обратное соединение, или звено, охваченное обратной связью. Так называется соединение двух звеньев, при котором выход звена прямой цепи подается на вход звена обратной связи, выход которого складывается с входом первого звена Если сигнал обратной связи вычитается, то обратная связь называется отрицательной, в противном случае — положительной.
![]()
![]()
![]()
Передаточная функция:
![]()
Перенос сумматора:
При переносе сумматора по ходу сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится звено. При переносе сумматора против хода сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится сумматор.
![]()
![]()
![]()
Перенос узла. При переносе узла по ходу сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится узел При переносе узла против хода сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится узел
2. Вариационное исчисление, математическая дисциплина, посвященная отысканию экстремальных (наибольших и наименьших) значений функционалов — переменных величин, зависящих от выбора одной или нескольких функций. Одной из первых задач В. и. была знаменитая задача о брахистохроне (И. Бернулли, 1696): определить форму кривой, лежащей в вертикальной плоскости, по которой тяжёлая материальная точка, двигаясь под действием только одной силы тяжести и не имеющая начальной скорости, перейдёт из верхнего положения А в нижнее положение В за минимум времени. Эта задача сводится к отысканию функции у (х), доставляющей минимум функционалу
![]()
где а и b — абсциссы точек А и В.
Другой такой же "исторической" задачей является задача об отыскании пути, вдоль которого распространяется свет, идущий от источника света (точка А)к некоторой точке В, в среде с переменной оптической плотностью (то есть в среде, где скорость распространения v есть функция координат). Для решения этой задачи может быть использован, так называемый, Ферма принцип, согласно которому из всех кривых, соединяющих точки А и В, луч света распространяется вдоль той, по которой свет приходит из A в B за кратчайшее время.
![]()
Прямые методы. В. и. как самостоятельная научная дисциплина сформировалась в 18 в., главным образом благодаря работам Л. Эйлера.
Простейшей задачей В. и. называют задачу отыскания функции x (t), доставляющей экстремум функционалу
![]()
где F — непрерывная и дифференцируемая функция своих аргументов. При этом функция x (t) должна удовлетворять следующим условиям: а) она должна быть кусочно дифференцируемой, б) при t = to и t = T она должна принимать значения х (to) = х0, х (Т) = хт. (2)
Обе задачи, рассмотренные в начале статьи, являются частными случаями простейшей задачи В. и.
Первые вариационные задачи были задачами механики. Они были поставлены в 18 в. и, следуя традициям того времени, первый вопрос, на который надо было ответить, был вопрос о способе фактического отыскания функции x (t), реализующей минимум функционала (1).
Билет 10
1. Звенья, передаточные функции которых имеют вид простых множителей или простых дробей, называют типовыми или элементарными. Пропорциональное звено называют звено которое описывается уравнение y(t)=ku(t) или что то же передаточной функции W(s)=k. Интегрирующие звено называется звеном которое описывается уравнением py=ku, или передаточной функции W(s)=k/s. Дифференцирующие звено называется звено которое описывается уравнением y=kpu или передаточной функции W(s)=ks. Апериодическое звено называется звеном первого порядка, которое описывается уравнением(Tp+1)y=ku или периодически W(s)=k/(Ts+1)
Передаточная функция: W(p)=k(T2p2+2ETp+1)