

РГР / metodicheskie_ukazaniya_zadaniya_dlya_individualnoy_raboty
.pdfРис. 1.7.
На схеме приняты следующие обозначения: ПУ – полупроводниковый
усилитель; |
G |
– генератор |
постоянного |
тока; |
M1 |
- |
управляемый |
электродвигатель |
постоянного |
тока; BR – тахогенератор; LG , LM1 – |
|||||
обмотки возбуждения, соответственно G |
и M1; |
M |
– |
асинхронный |
|||
приводной двигатель с короткозамкнутым ротором; iв |
– |
ток возбуждения; |
|||||
iяц – ток якорной |
цепи системы |
генератор-двигатель; ω – круговая частота |
|||||
вращения вала двигателя; uд |
– напряжение на выходных клеммах |
||||||
генератора; |
uз - напряжение сигнала задания; |
uос - выходное |
напряжение |
||||
тахогенератора.
Функциональную схему системы можно представить в виде, приведенном на рис.1.8.
Рис. 1.8
11
Контрольные вопросы
1.Назовите задачи, которые решаются в курсе теории автоматического управления.
2.Какую роль играет автоматизация на современном этапе развития науки и техники?
3.Укажите преимущества и недостатки принципов управления, применяемых в САУ.
4.Что такое функциональная схема САУ?
5.На какие классы делятся САУ по цели управления?
6.На какие классы делятся САУ по виду математического описания?
7.Что такое переходный процесс?
8.Какие типовые воздействия используются при изучении динамики элементов и систем?
9.Какие признаки элементов системы управления отражаются на ее функциональной схеме?
10.Назовите наиболее распространенные функциональные элементы систем управления.
11.На какие классы разделяются системы управления по величине
ошибки (∞) в установившемся режиме?
12.На какие классы разделяются системы управления по принципу
действия?
13.Какие преимущества и недостатки имеют разомкнутые системы управления?
14.Какие преимущества и недостатки имеют замкнутые системы управления?
12
2. Математическое описание САУ
Математическое описание в переменных вход – выход. Стандартная форма записи дифференциальных уравнений САУ. Операционный метод описания линейных САУ. Основные свойства преобразования Лапласа. Передаточная функция. Свойства и особенности передаточной функции. Линеаризация уравнений САУ. Математическое описание САУ в переменных состояния. Стандартная форма записи уравнений состояния. Структурные схемы САУ. Обозначения в структурных схемах. Передаточные функции типовых соединений звеньев. Дополнительные правила преобразования структурных схем. Определение передаточных функций замкнутой САУ по ее структурной схеме.
Решение вопросов анализа существующих и синтеза новых САУ возможно лишь при наличии соответствующего математического описания их свойств. Это описание называют математической моделью САУ, так как при ее составлении всегда делаются те или иные допущения и приближения.
При математическом описании САУ применяются два подхода: первый из них основывается на представлении моделей в переменных вход – выход, а другой – в переменных состояния.
Математическое описания системы составляют на основе описания
всех входящих в нее элементов. |
|
Для САУ, имеющей один вход x(t) и один выход |
y(t) , |
математическую модель можно представить в виде: |
|
F (x(t), x′(t), y(t), y′(t), y′′(t),..., y(n) (t))= 0 . |
(2.1) |
Для линейной стационарной САУ уравнение (2.1) является линейным неоднородным дифференциальным уравнением вида:
a |
0 |
y(n) (t) + a y(n−1) (t) +K+ a |
n |
y(t) = b u(m) (t) + b u(m−1) (t) +K+ b u(t) , (2.2) |
||||
|
|
1 |
|
0 |
1 |
m |
||
где u(t) и y(t) |
– соответственно, входная и выходная величины, |
|||||||
изменяющиеся |
во |
времени; |
|
ai , bj |
– постоянные |
коэффициенты, |
||
определяемые параметрами системы; n – порядок уравнения.
13
При исследовании САУ, особенно при сравнении свойств систем и их элементов между собой, удобно представлять уравнения в т.н. стандартной форме. При этом используются следующие правила:
–выходную величину и все ее производные записывают в левой части уравнения, а все остальные члены – в правой;
–коэффициент при выходной величине путем тождественных преобразований делают равным единице;
–если в правой части содержатся производные, то члены, содержащие определенную выходную величину и ее производные, объединяют в одну группу и коэффициент при этой величине выносят за скобки.
ВТАУ самое широкое применение нашел операционный метод описания, основанный на использовании интегрального преобразования Лапласа (L- преобразования):
|
∞ |
|
|
F (s) = L {f (t)}= ∫ |
f (t)e−st dt . |
(2.3) |
|
|
0 |
|
|
Это преобразование устанавливает соответствие между функцией |
f (t) |
||
действительной переменной |
t и функцией |
F (s) комплексной переменной |
|
s = α + jβ . При этом f (t) |
называют оригиналом, а F (s) - изображением. |
||
Преобразование Лапласа ставит в соответствие операциям над оригиналами некоторые определенные операции над изображениями. В таблице 2.1 приведены основные соотношения, используемые при описании линейных САУ.
Применение преобразования Лапласа при математическом описании САУ обусловливается также и тем, что с его помощью определяют так называемую передаточную функцию, которая является самой компактной формой описания свойств САУ или ее составных элементов.
Передаточной функцией называется отношение выходной величины ко входной, преобразованных по Лапласу при нулевых начальных условиях.
14
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|||
Свойства преобразования Лапласа |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Наименование свойства |
|
|
|
Оригинал |
|
|
Изображение |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
n |
|
|
|
|
|
Линейность |
∑ ak fk (t ) |
|
∑ak Fk (s) |
||||||||||
|
k =1 |
|
|
|
|
k =1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференцирование оригинала |
|
d |
( n ) |
f (t ) |
|
|
|
s n F (s) |
|||||
|
|
|
|
|
|||||||||
при нулевых начальных условиях |
|
|
dt n |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интегрирование оригинала при |
|
τ |
|
|
|
|
|
F ( s ) |
|||||
∫ f (t)dt |
|
|
|||||||||||
нулевых начальных условиях |
|
|
|
s |
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
Изменение масштаба |
|
f (αt) |
|
1 |
F |
|
s |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
α |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
α |
|||
|
|
|
|
|
|
||||||||
Смещение аргумента оригинала |
|
f (t − τ) |
|
|
F (s)e−sτ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
Свертка функций |
∫ f1 (τ ) f2 (t −τ )dτ |
|
|
F1 (s) F2 (s) |
|||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Начальное значение оригинала |
lim f (t) |
|
|
lim sF (s) |
|||||||||
|
t→0 |
|
|
|
|
s→∞ |
|
|
|
||||
|
|
|
|
|
|
||||||||
Конечное значение оригинала |
|
lim f (t) |
|
|
lim sF (s) |
||||||||
|
t→∞ |
|
|
|
|
s→0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
Уравнения многих реальных элементов и САУ в целом в той или иной |
|||||||||||||
мере являются нелинейными. В этом случае переменные |
|
x(t) , |
|
y(t) и их |
|||||||||
производные входят в выражение для функции F в виде произведений, частных, степеней либо других более сложных функций.
Всвязи со сложностью анализа и решения нелинейных уравнений широко применяется приближенная их замена на линейные – линеаризация.
Воснову метода линеаризации положено разложение в ряд Тейлора, позволяющее разложить нелинейную функцию нескольких переменных по степеням малых отклонений этих переменных в окрестностях значений, соответствующих заданному установившемуся режиму. В качестве
15
установившегося режима может выбираться режим, существовавший до начала действия возмущения, либо режим, который установится после затухания переходного процесса.
Рассмотрим нелинейное дифференциальное уравнение второго порядка
вида:
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′ |
|
′′ |
)= 0 . |
|
|
|
|
(2.4) |
||||
|
|
|
|
|
|
|
|
|
|
F(x, x , f , y, y , y |
|
|
|
|
|
|||||||||||
Преобразовав его, получаем окончательно: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
∂F |
|
x(t)+ |
∂F |
|
|
′ |
∂F |
|
f (t) |
+ |
∂F |
|
y(t)+ |
∂F |
|
|
′ |
+ |
|
∂F |
|
|
′′ |
|||
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
′ |
|
|
|
|
|
|
′ |
|
′′ |
|||||||||||||||
|
|
|
[x (t)]+ |
|
|
|
|
|
|
|
[y (t)] |
|
|
[y (t)] =0. (2.5) |
||||||||||||
∂x |
|
0 |
|
∂(x ) |
|
0 |
∂f |
|
0 |
|
∂y |
|
0 |
∂(y ) |
|
0 |
|
∂(y ) |
|
0 |
||||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Как видно из (2.5), в результате линеаризации получается уравнение в |
||||||||||||||||||||||||
отклонениях. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Метод переменных состояния основан на понятии состояния. |
||||||||||||||||||||||||
|
|
Состояние системы в момент времени t 0 |
|
- такой минимальный набор |
||||||||||||||||||||||
сведений о ней, которого вместе со входной функцией |
u(t) , заданной для |
|||||||||||||||||||||||||
интервала времени t 0 ≤ t |
|
≤ t k |
, достаточно для однозначного определения |
|||||||||||||||||||||||
выходной функции y(t) |
для t 0 |
≤ t |
|
≤ t k |
при любом tk |
≥ t0 . |
||||||||||||||||||||
|
|
Состояния системы можно охарактеризовать совокупностью |
||||||||||||||||||||||||
некоторых переменных |
x1 (t), x2 (t),K, xn (t) , |
|
знание начальных значений |
|||||||||||||||||||||||
которых |
x1 (0), |
|
x2 (0),K, |
xn (0) |
|
и |
|
входного |
|
воздействия |
|
u(t) позволяет |
||||||||||||||
однозначно определить будущее поведение динамической системы. Эти переменные называются переменными состояния.
Чтобы связать последовательные состояния системы во времени,
используются дифференциальные уравнения: |
|
x1′(t) =ϕ1 [x1(t), x2 (t),K, xn (t); u1(t), u2 (t),K, um (t); t], |
|
x2′(t) =ϕ2 [x1 (t), x2 (t),K, xn (t); u1 (t), u2 (t),K, um (t); t], |
. (2.6) |
|
|
KKKKKKKKKKKKKKKKKKKKKKKK |
|
xn′(t) =ϕn [x1(t), |
x2 (t),K, |
xn (t); u1(t), |
u2 (t),K, |
um (t); |
t] |
|
|
|
|
|
|
16

Правые части этих уравнений зависят от искомых функций xi (t) и не зависят от их производных. Система уравнений первого порядка вида (2.6) называется системой n дифференциальных уравнений, записанной в
нормальной форме Коши.
В ТАУ при анализе САУ самое широкое применение получили так называемые структурные схемы. При этом под структурной схемой САУ подразумевается условное графическое изображение математической модели системы в виде совокупности отдельных звеньев с указанием связей между ними.
Правила изображения элементов САУ на структурных схемах заключаются в следующем.
1. Звено обозначается в виде прямоугольника с указанием входных и выходных величин.
а) |
|
|
|
б) |
|
|
|
Рис. 2.1. |
Изображения звеньев |
|
|
|
|||
Внутри прямоугольника |
указывается |
передаточная |
функция |
||||
(рис.2.9,а). |
|
|
|
|
|
|
|
Допускается вместо |
W (s) |
указывать уравнение |
или |
характеристику |
|||
звена (рис.2.9,б). Обозначения входных и |
выходных величин записывают в |
||||||
виде изображений или |
оригиналов в |
зависимости |
от |
обозначения в |
|||
прямоугольнике. Допускается также звенья нумеровать, а их передаточные функции, уравнения или характеристики представлять вне схемы.
2.Цепь передачи сигнала изображается прямой линией на которой стрелкой указывается направление прохождения сигнала, а также приводится буквенное обозначение этого сигнала.
3.Элемент сравнения изображается в виде, приведенном на рис.
2.2.
17
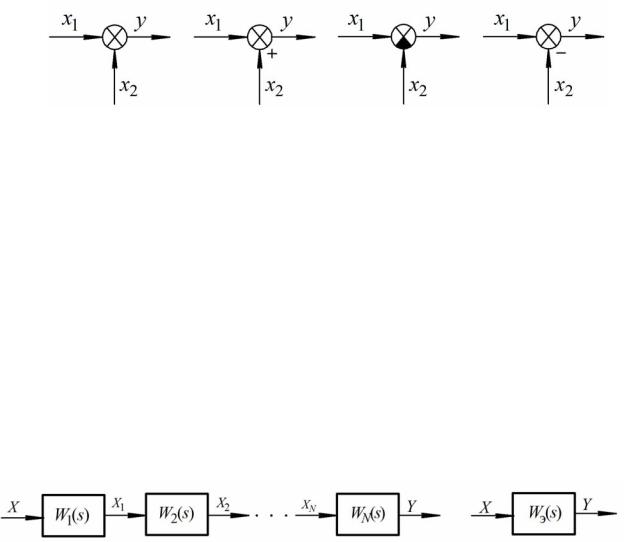
а) б)
Рис. 2.2. Изображения элементов сравнения при реализации функций:
а) y = x1 +x2 ; б) y = x1 − x2
Структурная схема реальной САУ обычно может быть представлена в виде комбинации трех типов соединений звеньев: последовательного, параллельного и встречно-параллельного. Каждое из этих соединений может быть заменено по определенным правилам одним звеном, свойства которого будут эквивалентными свойствам соединения.
Последовательное соединение. При таком соединении выходная величина предыдущего звена является входной величиной последующего звена (см. рис.2.3,а).
а) |
б) |
|
||
Рис. 2.3. Структурная схема последовательного соединения звеньев: |
||||
а) исходная; б) эквивалентная |
|
|||
Определение эквивалентной передаточной функции соединения |
WЭ (s) |
|||
по каналу X (s) →Y (s) - (см. рис.2.3,б) осуществляется по выражению: |
|
|||
|
Y (s) |
N |
|
|
WЭ (s) = |
=∏Wi (s) . |
(2.7) |
||
X (s) |
||||
|
i=1 |
|
||
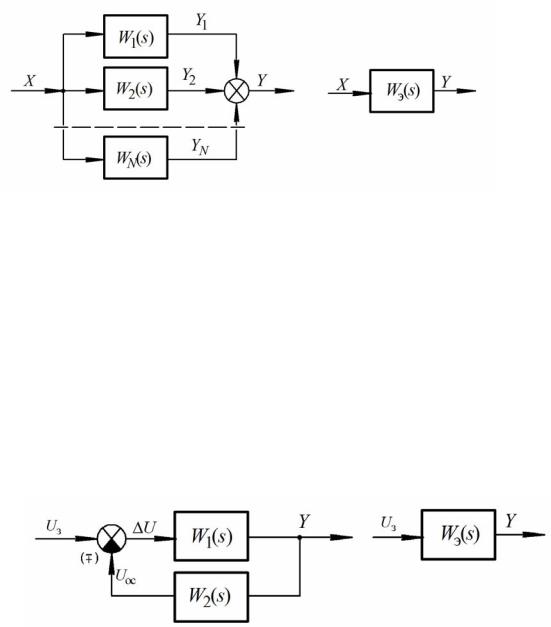
Параллельное соединение. При таком соединении на вход всех звеньев подается одна и та же величина, а выходная величина равна сумме выходных величин отдельных звеньев (см. рис. 2.4,а).
18
а) |
б) |
Рис. 2.4. Структурная схема параллельного соединения звеньев: а) исходная; б) эквивалентная
Откуда:
|
Y (s) |
N |
|
|
WЭ (s) = |
= ∑Wi (s) . |
(2.8) |
||
X (s) |
||||
|
i=1 |
|
Встречно-параллельное соединение (охват звена обратной связью).
В этом случае структурная схема имеет вид, приведенный на рис. 2.5,а, где обратная связь может быть как отрицательной, так и положительной.
а) б)
Рис. 2.5. Структурная схема встречно-параллельного соединения звеньев: а) исходная; б) эквивалентная
Откуда окончательно имеем:
Wэ(s) = |
Y (s) |
= |
|
W1(s) |
|
||
|
|
|
|
. |
(2.9) |
||
U |
(s) |
1±W (s)W (s) |
|||||
|
з |
|
|
1 2 |
|
|
|
Знак “+” в последней формуле ставится в случае отрицательной обратной связи, а “-” – положительной.
19

В ряде случаев исходная структура САУ может быть такой, что применение описанных выше основных правил структурных преобразований оказывается недостаточно для ее упрощения.
Наиболее распространенные из этих правил приведены в таблице 2.2, где все переменные Z обозначают сигналы, появившиеся либо исчезнувшие в результате преобразований.
Таблица 2.2.
Правила преобразования структурных схем САУ
Операция |
Исходная схема |
Преобразованная схема |
|
||||||
|
|
|
|
|
|
|
|
|
|
1. |
Перестановка |
|
|
|
|
|
|
|
|
|
сумматоров |
|
|
|
|
|
|
|
|
|
|
Y = X1 −X2 +X3 +X4 |
Y = X1 + X4 −X2 + X3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
2. |
Перестановка |
|
|
|
|
|
|
|
|
|
узлов разветв- |
|
|
|
|
|
|
|
|
|
ления сигна- |
|
|
|
|
|
|
|
|
3. |
Перенос сум- |
|
|
|
|
|
|
|
|
|
матора через |
|
|
|
|
|
|
|
|
|
звено вперед |
Y = W (s)(X 1 + X 2 ) |
Y =W(s)X1 +W(s)X2 (s) =W(s)(X1 + X2 ) |
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
4. |
Перенос сум- |
|
|
|
|
|
|
|
|
|
матора через |
|
|
|
|
|
|
|
|
|
звено назад |
|
|
|
|
X |
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
Y =W(s)X1 + X2 |
Y = X1 |
+ |
|
|
|
W(s) =W(s)X1 |
+ X2 |
|
|
|
|
|
|||||
|
|
|
|
W(s) |
|
||||
20