

§ 10. Метод решения обратной задачи.
Многие физические явления, изучаемые в школьном курсе физики, рассматриваются в идеальных условиях. При рассмотрении механических явлений часто пренебрегают сопротивлением среды, трением, рассеянием энергии, поэтому такие явления носят обратимый характер. Для таких случаев направление прямого процесса можно заменить обратным процессом.
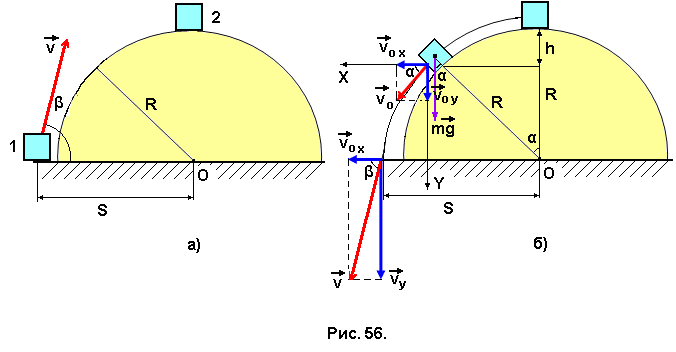
Задача № 52. С какого расстояния S от центра полусферы радиуса R =1,35 м, с какой скоростью и под каким углом β нужно бросить маленькую шайбу (из положения 1), чтобы она, попав на полусферу, остановилась на её вершине (положение 2) (рис.56,а)? Трением шайбы о полусферу и сопротивлением воздуха пренебречь. Ускорение свободного падения считать равным 10 м/с2.
Сформулируем обратную задачу: на каком расстоянии S от центра полусферы, с какой скоростью V и под каким углом β упадёт шайба, скатывающаяся с вершины полусферы радиуса R (рис. 56,б)? Трением шайбы о поверхность полусферы и сопротивлением воздуха пренебречь.
Определим, с какой скоростью V0, под каким углом α к горизонту и с какой высоты от уровня основания полусферы (R cosα) отрывается шайба от поверхности полусферы. Точка отрыва лежит ниже вершины на расстоянии равном h, поэтому скорость шайбы в момент отрыва определится по формуле: V0 = (2gh)1/2. (9.31)
В
момент отрыва шайбы от поверхности
сферы сила реакции опоры становится
равной нулю, сила трения равна нулю по
условию, поэтому единственной силой,
действующей на шайбу в этот момент,
является сила тяжести. Точка отрыва
шайбы является точкой перехода её
траектории с дуги окружности радиуса
R
на параболическую кривую. Составляющая
силы тяжести, действующая вдоль радиуса,
является силой, сообщающей шайбе
 центростремительное
ускорение, поэтому скорость шайбы в
момент отрыва можно определить по
второму закону Ньютона:
центростремительное
ускорение, поэтому скорость шайбы в
момент отрыва можно определить по
второму закону Ньютона:
mg cos α = m V02/R, откуда V0 = (gR cosα)1/2. (9.32)
Так как h = R(1 – cosα) (рис. 56,б), то: V0 = [2gR (1 - cosα)]1/2. (9.33)
Приравняв правые части равенств (9.32) и (9.33) определим косинус угла α, под которым направлен вектор V0: cos α = 2/3. (9.34)
Подставив значение cos α в одно из уравнений (9.32) или (9.33), получаем значение скорости в момент отрыва шайбы:
V0 = (2gR /3)1/2 = (2 .10 .1,35 : 3)1/2 = 3 м/с. (9.35)
Запишем уравнения движения шайбы после её отрыва в координатной форме, направив оси координат Х и У так, как показано на рис. 56,б:
Х = Voxt = (Vo cosα)t; (9.36)
Y = Voyt + gt2/2 = (Vo sin α)t +gt2/2 (9.37)
При t = tп – времени полёта шайбы до точки падения, X = Xmax, a
Y = R cos α = 1,35 . 2/3 = 0,9 м. Определим sin α = (1 – cos2α)1/2 = (1 – 4/9)1/2 = 51/2/3.
После подстановки tп в уравнение (9.37) оно примет вид:
0,9 = 51/2tп + 5tп2, (9.38)
откуда tп = (51/2 + 231/2)/10 = 0,7 с.
Подставив значение tп в (9.36) определим Xmax = (Vo cosα)tп = 3 . 2/3 . 0,7 = 1,4 м.
Точка падения шайбы лежит от центра полусферы на расстоянии
S = Xmax + R sin α = 1,4 + 1,35 . 51/2/3 = 2,41 м.
Точка падения шайбы будет той точкой, откуда нужно бросить шайбу, чтобы она остановилась на вершине полусферы. Теперь определим скорость, с которой нужно бросить шайбу. Она будет равна скорости V, с которой шайба падает на горизонтальную поверхность:
V = (Vox2 + Vy2)1/2 . (9.39)
Vox = Vo cosα = 3 . 2/3 = 2 м; Vy = Vo sin α + gtп = 3 . 51/2/3 + 10 . 0,7 = 9,24 м/с, подставив эти значения в (9.39), получим значение скорости
V = (22 + 9,242)1/2 = 9,45 м/с.
И, наконец, определим угол, под которым нужно направить вектор скорости V при бросании шайбы. Он будет равен углу β, под которым шайба падает на горизонтальную поверхность.
tg β = Vy / Vox = 9,24/ 2 = 4,62; β = 77,8o.
Таким образом, чтобы шайба, будучи брошенной, остановилась на вершине полусферы радиуса 1,35 м. её нужно бросить с расстояния 2,41 м от центра полусферы, со скоростью 9,45 м/с под углом 77,8о к горизонтальной поверхности, на которой расположена полусфера.