

4.6. Свойства цф различной структуры
|
|
Структура |
||||
|
Характеристика |
каскадная |
параллельная |
волновая |
лестничная |
частотной выборки |
|
Чувствительность к квантованию коэффициентов |
Средняя |
Средняя |
В АУ с фиксированной запятой - средняя, с плавающей - низкая |
Высокая |
Высокая |
|
Уровень шума квантования арифметических операций |
Средний |
Низкий |
Низкий |
Высокий |
Средний |
|
Уровень выходных шумов квантования |
Низкий |
Средний |
Низкий |
Высокий |
Средний |
|
Эффективность вычислений |
Высокая |
Высокая |
Низкая |
Высокая |
Средняя |
|
Возможности распараллеливания и мультиплексирования |
Хорошие |
Хорошие |
Отсутствуют |
Средние |
Хорошие |
|
Возможности сжатия динамического диапазона и масштабирования |
Средние |
Средние |
Низкие |
Средние |
Хорошие |
Продолжение табл. 4.6
|
|
Структура |
||||
|
Характеристика |
интерполяционная |
Грея-Маркела |
на основе Фурье |
на основе быстрых преобразований Уолша, Адамара, Хаара |
на основе теоретико-числовых преобразований |
|
Чувствительность к квантованию коэффициентов |
Высокая |
Низкая |
Средняя |
Нулевая |
Нулевая |
|
Уровень шума квантования арифметических операций |
Средний |
Высокий |
Средний |
Средний |
Нулевой |
|
Уровень выходных шумов квантования |
Средний |
Высокий |
Средний |
Низкий |
Нулевой |
|
Эффективность вычислений |
Средняя |
Высокая |
Высокая |
Высокая |
Очень высокая |
|
Возможности распараллеливания и мультиплексирования |
Хорошие |
Средние |
Хорошие |
Хорошие |
Очень хорошие |
|
Возможности сжатия динамического диапазона и масштабирования |
Хорошие |
Средние |
Хорошие |
Хорошие |
Очень низкие |
Формы реализации дискретных фильтров
Структурная схема, показанная ранее, называется прямой формой реализации рекурсивного фильтра (direct form I) и не является единственно возможной. Рассмотрим еще несколько вариантов.
Каноническая форма
Разделим общий сумматор в схеме рис. 7 на два отдельных — для рекурсивной и нерекурсивной частей фильтра (рис. 8, а). В результате получаем два последовательно соединенных фильтра, один из которых является нерекурсивным, а другой, напротив, содержит только рекурсивную часть. Так как результат последовательного прохождения сигнала через ряд линейных стационарных устройств не зависит от последовательности их соединения, мы можем поменять местами две «половинки» нашего фильтра (рис. 8, б). Теперь остается заметить, что в обе линии задержки подается один и тот же сигнал, поэтому они будут содержать одинаковые наборы отсчетов. Это позволяет объединить линии задержки. Полученная в результате схема изображена на рис. 9, она называется канонической формой реализации рекурсивного фильтра (canonic form или direct form II).
С теоретической точки зрения эти варианты эквивалентны. Однако при практической реализации необходимо обратить внимание на ряд особенностей, присущих этим схемам. С одной стороны, при канонической реализации используется общая линия задержки, что уменьшает число необходимых ячеек памяти. Однако при этом абсолютные величины отсчетов, «бегающих» в линии задержки, могут существенно превосходить амплитуду входного и выходного сигналов. Это приводит к необходимости увеличивать разрядность представления чисел в линии задержки по сравнению с разрядностью входного и выходного сигналов, что усложняет реализацию устройства. При прямой реализации в линиях задержки хранятся непосредственно отсчеты входного и выходного сигналов, то есть повышенная разрядность линий задержки не требуется. Единственным элементом, требующим повышенной разрядности, в данном случае является сумматор, и это учтено в архитектуре микропроцессоров, специально предназначенных для обработки сигналов в реальном времени.
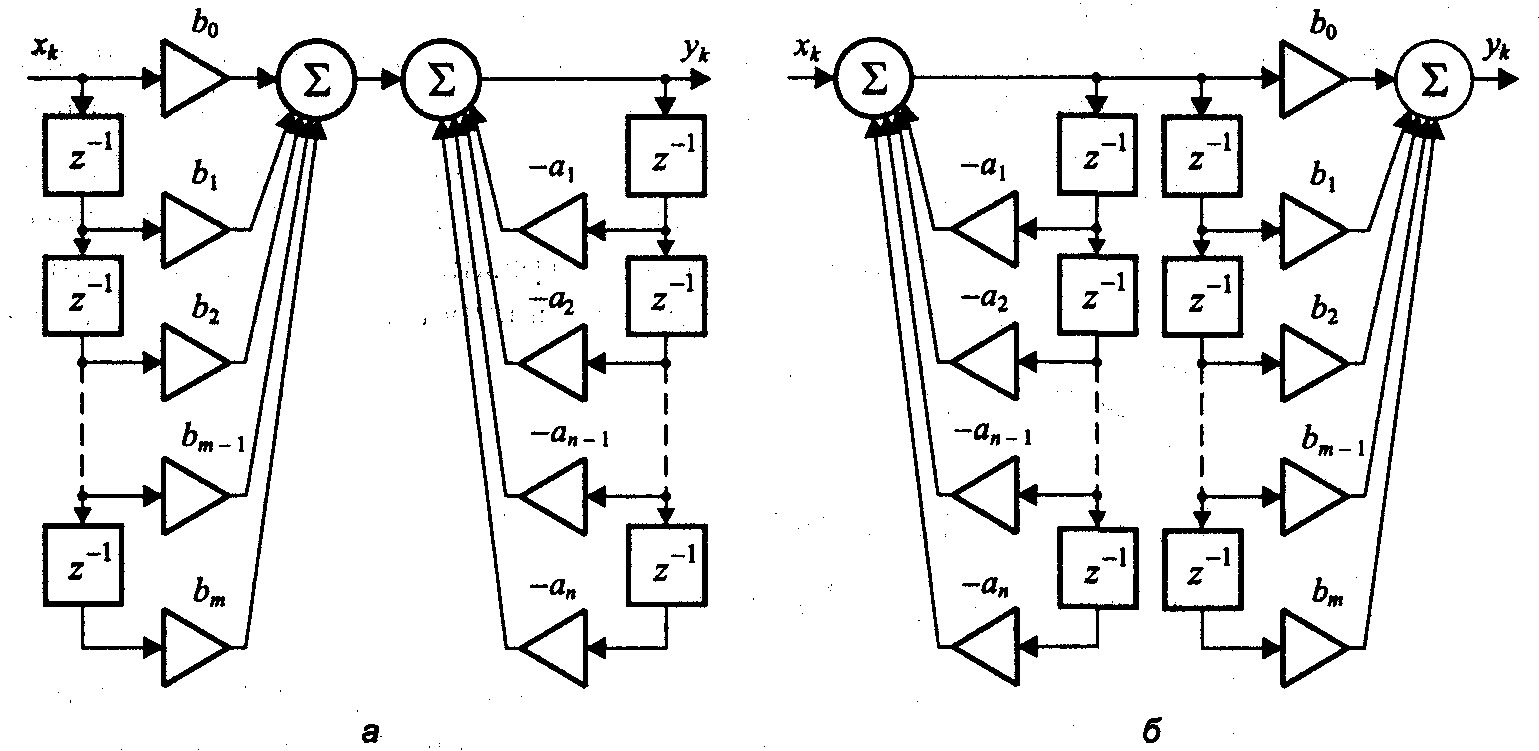
Рис. 8. Перестановка рекурсивной и нерекурсивной частей фильтра путь к получению канонической реализации
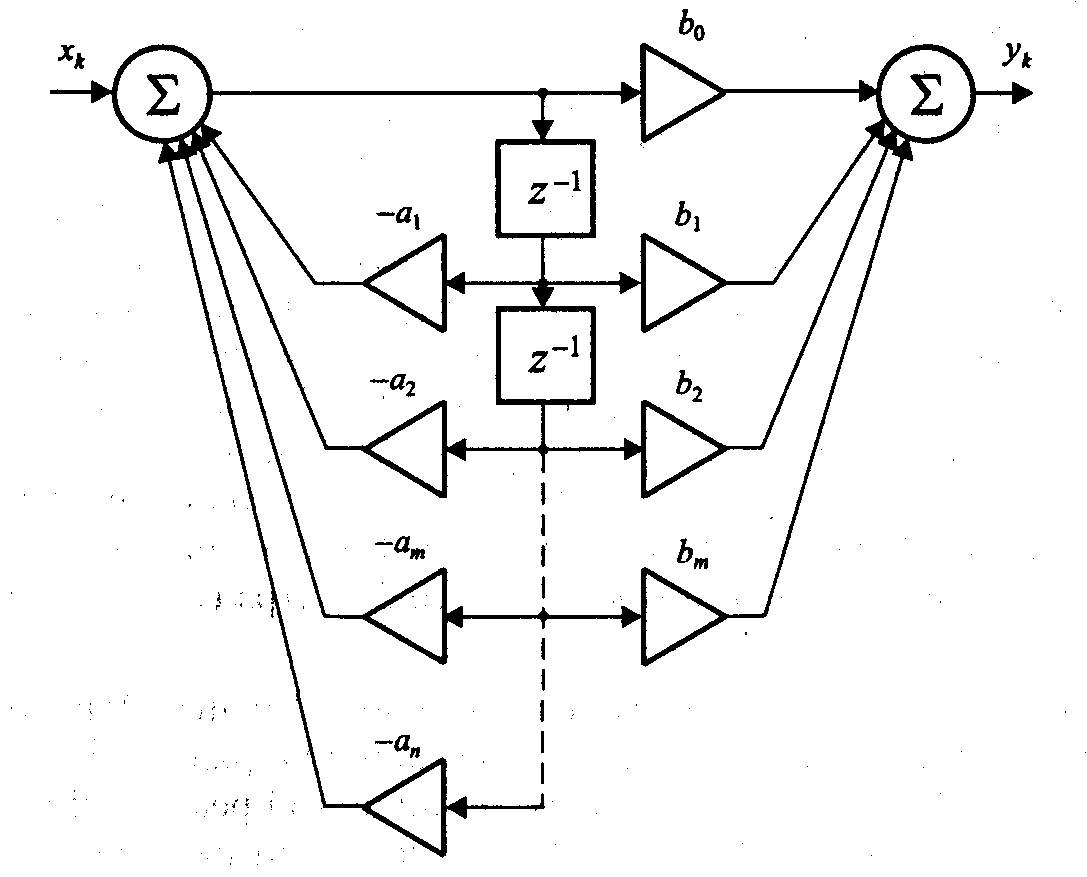
Рис. 9. Рекурсивный фильтр — каноническая реализация
Транспонированная форма
Поменяем в схеме рис. 6 последовательность выполнения операций умножения и задержки, используя в каждой ветви отдельную линию задержки на нужное количество тактов. Разделим также общий сумматор на несколько двух-входовых сумматоров. Получившаяся структура показана на рис. 10. Теперь, рассмотрев любую пару соседних сумматоров, можно заметить, что суммируемые ими сигналы претерпевают некоторую общую задержку. Это дает возможность поменять местами операции суммирования и задержки. Получившаяся схема, показанная на рис. 11, называется транспонированной реализацией дискретного фильтра (direct transposed form II).
ЗАМЕЧАНИЕ--------------------------------------------------------------------------------------------------
Разумеется, в транспонированной форме может быть реализован и нерекурсивный фильтр. Для этого в структурной схеме рис. 10 необходимо удалить все ветви с коэффициентами bt, кроме bo.
Транспонированная схема позволяет эффективно распараллелить вычисления и потому применяется при реализации дискретных фильтров в виде специализированных интегральных схем. Действительно, при реализации фильтра в форме рис. 4.3 или рис 4.4 можно одновременно выполнять все операции умножения, но для получения выходного результата необходимо дождаться окончания выполнения всех операций сложения. В транспонированной же схеме, помимо умножения, можно одновременно выполнять и все операции сложения, поскольку они являются независимыми (то есть не используют в качестве суммируемых величин результаты других сложений).

Рис. 10. Изменение последовательности выполнения операций умножения и задержки — путь к получению транспонированной реализации фильтра
Как видно из схемы рис. 10, собственно для расчета выходного сигнала необходимо выполнить одно умножение и одно cложение; все остальные операций производят подготовку промежуточных результатов для вычисления последующих выходных отсчетов.

Рис. 11. Транспонированная реализация дискретного фильтра
Если применить описанные преобразования к канонической структуре, показанной на рис. 9, получится еще один вариант транспонированной реализации фильтра (direct transposed form I) (рис. 12). В отличие от предыдущей схемы, данная структура содержит большее число элементов памяти.
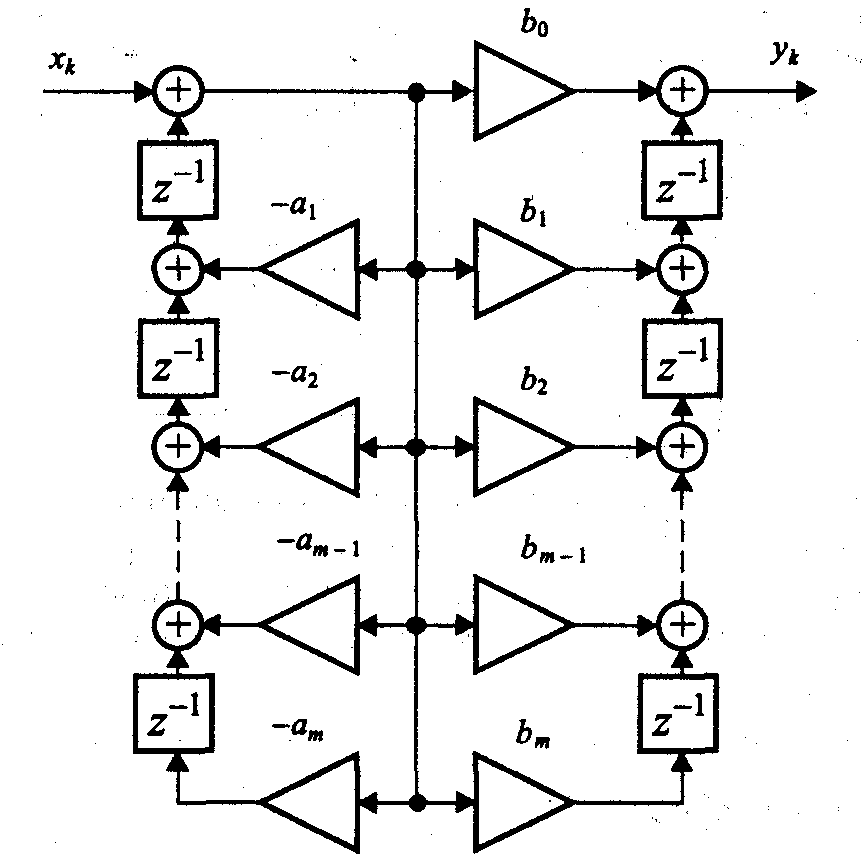
Рис. 12. Транспонированная реализация, полученная из канонической формы дискретного фильтра
Последовательная (каскадная) форма
В
разделе «Нули и полюсы» было показано,
что числитель и знаменатель функции
передачи физически реализуемого
дискретного фильтра можно разложить
на линейные (относительно
![]() )
множители. Перемножение функций передачи
соответствует последовательному
(каскадному) включении} соответствующих
фильтров, поэтому такое представление
дает реализацию фильтра в виде
последовательно включенных фильтров
1-го порядка (при этом некоторые из них
могут иметь комплексные коэффициенты)
либо фильтров 1-го и 2-го порядка с
Вещественными коэффициентами.
)
множители. Перемножение функций передачи
соответствует последовательному
(каскадному) включении} соответствующих
фильтров, поэтому такое представление
дает реализацию фильтра в виде
последовательно включенных фильтров
1-го порядка (при этом некоторые из них
могут иметь комплексные коэффициенты)
либо фильтров 1-го и 2-го порядка с
Вещественными коэффициентами.
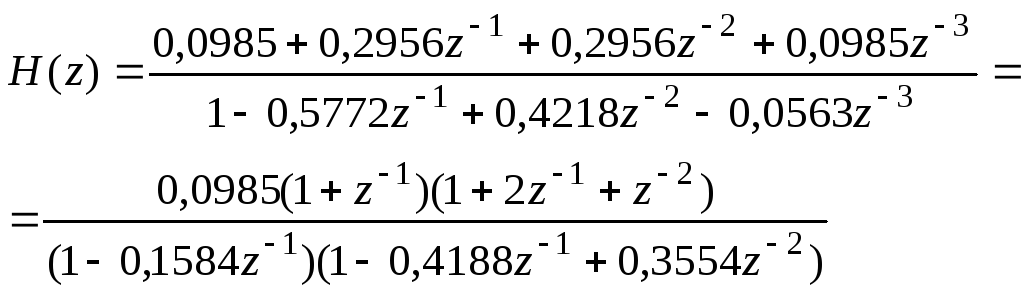
Рассмотрим конкретный пример, задавшись чйслёйными значениями коэффициентов фильтра:
 (4.16)
(4.16)
ЗАМЕЧАНИЕ---------------------------------------------------------------------------------------------------
Данный фильтр является фильтром Баттерворта 3-го порядка с частотой среза, равной 1/5 частоты дискретизации, синтезированным методом билинейного z-преобразования.
Структурная схема получившейся последовательной реализации фильтра представлена на рис. 13.
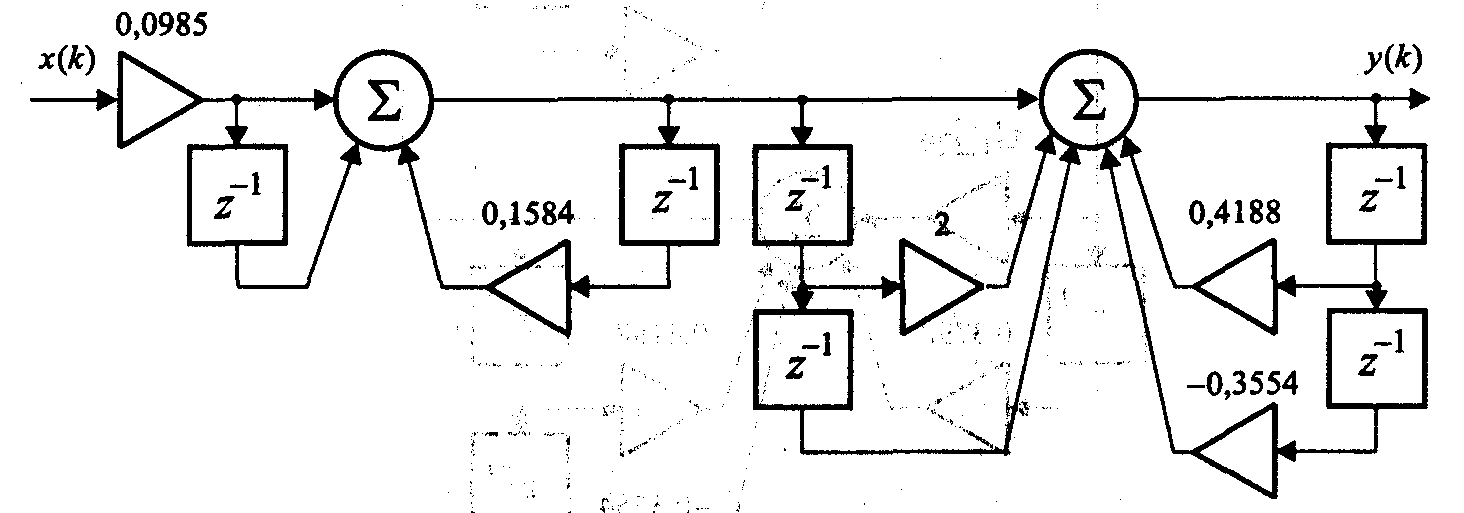
Рис.13. Последовательная реализация дискретного фильтра
Последовательная реализация часто используется на практике, поскольку она позволяет ослабить нежелательные эффекты, связанные с ошибками округления.
Параллельная форма
Еще один способ; преобразования функции, передачи физически реализуемого фильтра — представление ее в виде суммы простейших дробей. Каждое из слагаемых при таком представлении соответствует функции передачи рекурсивного фильтра 1-го порядка (возможно, с комплексными коэффициентам) либо 1-го или 2-го порядка (если используется представление в виде суммы простейших дробей только с вещественными коэффициентами). Сама операция сложения эквивалентна параллельному соединению этих фильтров с суммированием выходных результатов;
Рассмотрим конкретный пример, используя ту же функцию передачи (4.16), что и раньше:
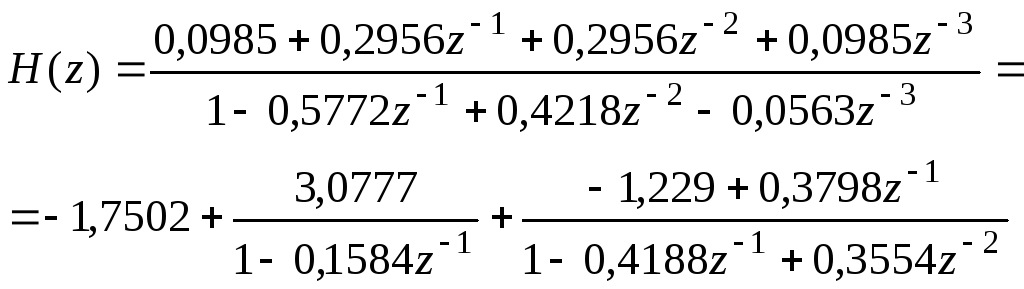
Структурная схема получившейся параллельной реализации фильтра представлена на рис. 14. Постоянному слагаемому соответствует верхняя ветвь структурной схемы, содержащая только умножитель.
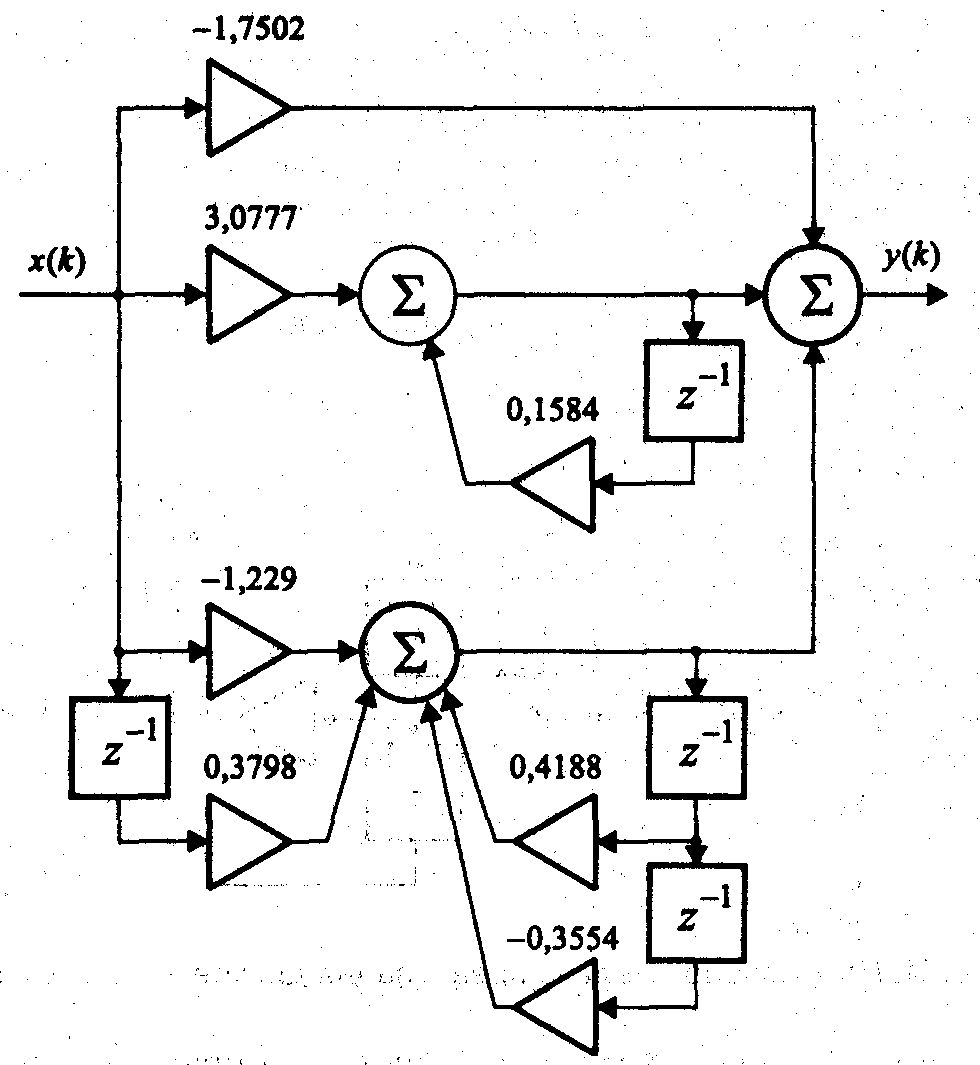
Рис. 14. Параллельная реализация дискретного фильтра
Поскольку для БИХ-фильтра характерно наличие обратной связи, то в принципе в нем возможна потеря устойчивости. В этом отношении КИХ-фильтр имеет преимущество: он всегда устойчив. Но зато для качественного КИХ-фильтра обычно требуется большое число звеньев задержки, в то время как БИХ-фильтр обычно содержит относительно небольшое число этих звеньев.
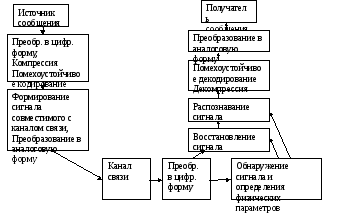
Практические аспекты преобразования и обработки сигналов
Особенности сигналов в различных прикладных задачах, прикладные методики обработки.
Краткий перечень областей эффективного применения с указанием выполняемых алгоритмов приведен ниже. Системы обработки сигналов выполняют операции анализа и селекции в частотной, амплитудной, временной области. Формируют сигналы в системах управления процессами. По используемым алгоритмам анализа, селекции и управления, узлы обработки можно разделить на несколько категорий: фильтры частотной селекции, оптимальные (квазиоптимальные), адаптивные и эвристические. Используемые алгоритмы могут быть линейными и нелинейными, стационарные и нестационарные.
Обработка одномерных сигналов
Телекоммуникационные системы.
Радиосвязь – обеспечение надежности систем наземной и космической связи за счет оптимизации алгоритмов выделения, кодирования для сжатия и увеличения помехозащищенности, подавление помех, полоса сигнала до 100 кГц. Применяемые алгоритмы и операции: спектральный анализ, одномерное и двумерное дискретное преобразование Фурье, взаимная корреляция и согласованная фильтрация.
Пример. Система цифровой телефонной связи.
Нелинейная обработка аудио. Шумоподавление. Компрессор, эспандер. Спецэффекты.
Обработка речевых и звуковых сигналов в полосе сигнала 50 кГц – анализ и синтез речи, улучшение качества звукозаписи, акустики помещений и систем. В системах обработки звука цифровые процессоры обработки сигнала решают задачи анализа, распознавания и синтеза речи, сжатия речи в системах телекоммуникации. Для систем обработки изображений типовыми задачами являются улучшение изображений, сжатие информации для передачи и хранения, распознавание образов. При обработке цифровых звуковых сигналов используются алгоритмы цифровой фильтрации и спектрального анализа (вычисление ДПФ и БПФ), алгоритмы корреляционного анализа, обратной свертки, специальные алгоритмы линейного предсказания. В большинстве случаев удовлетворительные результаты обеспечивает формат данных с фиксированной запятой, длина слова 16 бит, частоты сигналов от 4 до 20 кГц (до 40 кГц в случае обработки музыки), требуемая производительность – до 10x106 операций в секунду – 10 MIPS по компьютерной терминологии.
Анализ вибраций для контроля качества двигателей и механических систем, полоса сигнала от 10 кГц до 1 МГц.
Медицина, биология – анализ кардиограмм и энцефалограмм при полосе сигнала до 100 кГц., томографические исследования(УЗИ,ЯМР), полоса сигнала до 10 МГц.
Радиоастрономия – спектры линий, радиоинтерферометрия со сверхбольшими базами для разрешения радиоисточников, полоса сигнала 1–10 МГц. Применяемые алгоритмы:
спектральный анализ, разрешение 10–4;
взаимная корреляция;
фильтрация.
Обработка двумерных сигналов
Обработка изображений – улучшение качества снимков – резкости и контрастности, подавление помех, сжатие и восстановление после сжатия, восстановление изображений из оцифрованных голограмм, размер изображений 103x103. При обработке изображений применяется двумерное ДПФ и двумерная фильтрация.
Все методы сжатия видеоинформации основаны на устранении (в той или иной степени) статистической и психофизиологической избыточности кодируемых видеосообщений (последняя обусловлена, в частности, пространственно-временными ограничениями зрительного восприятия). Алгоритмы JPEG и MPEG частично устраняют оба вида избыточности. и округлении и отбрасывании малых по величине высокочастотных спектральных составляющих учитывается анизотропия пространственного разрешения зрения. Кодирование оставшихся коэффициентов неравномерным кодом Хаффмена и использование в MPEG межкадровой ДИКМ устраняет статистическую избыточность преобразованных изображений.
Однако увеличение коэффициентов сжатия приводит к появлению артефактов, т.е. различного рода посторонних узоров и муаров на изображении, в том числе в виде блочной структуры, присущей всем методам блочного кодирования. Поэтому, несмотря на свою относительную эффективность и простоту аппаратурной реализации, методы JPEG и MPEG в полной мере не обеспечивают необходимых для многих практических приложений высоких коэффициентов сжатия видеоданных.
Более эффективно осуществлять сжатие позволяют процедуры wavelet-преобразования или фрактальные методы кодирования. Правда, длительность самого преобразования и сложность аппаратной реализации пока ограничивает их применение.
Характерным для систем обработки изображений является восстановление и улучшение изображений с помощью инверсной свертки, обработка массивов отсчетов с помощью алгоритмов быстрого преобразования Фурье. При восстановлении трехмерной структуры объектов, получаемых методами проникающего излучения в дефектоскопии и медицинской интраскопии, применяются методы пространственно-частотной фильтрации. Другой класс алгоритмов – преобразование контрастности, выделение контуров, статистическая обработка изображений. Для сжатия информации наиболее эффективны ортогональные преобразования Фурье, Адамара и Уолша. Требуемая производительность оценивается величинами 100–1000 MIPS, массивы данных – 105–106 отсчетов.
Радио- и гидролокация – обнаружение и измерение координат, профилирование, построение радиоизображения, полоса сигнала 100 кГц – 1 МГц. Применяются следующие алгоритмы:
согласованная фильтрация, база сигнала 102–104;
спектральный анализ, разрешение 10-4;
двумерное ДПФ, двумерная фильтрация;
фазирование сигналов, ограничение выбросов в сигналах.
При обработке цифровых сигналов радиолокатора используются алгоритмы цифровой фильтрации и спектрального анализа (вычисление дискретного и быстрого преобразования Фурье – ДПФ и БПФ), алгоритмы корреляционного анализа, обратной свертки, специальные алгоритмы линейного предсказания.
В области военного морского приборостроения системы цифровой обработки использовались, в частности, для анализа гидроакустических сигналов, определения шумовых паспортов кораблей на основе спектральных характеристик, вычисления корреляционных зависимостей паспорта и реального гидроакустического сигнала.
Радиоастрономия – спектры линий, радиоинтерферометрия со сверхбольшими базами для разрешения радиоисточников, полоса сигнала 1–10 МГц. Применяемые алгоритмы:
спектральный анализ, разрешение 10–4;
взаимная корреляция;
фильтрация.
Медицина, биология – анализ кардиограмм и энцефалограмм при полосе сигнала до 100 кГц., томографические исследования(УЗИ,ЯМР), полоса сигнала до 10 МГц.
Искажения двумерных сигналов (изображений)
Дефокусировка объектива. Дефокусировкой определяется большое количество искажений, возникающих в оптических системах. Можно показать, что передаточная функция линзы с круговой апертурой при дефокусировке имеет следующий вид
![]()
Здесь
![]() — функция Бесселя
первого рода; а —
параметр дефокусировки. Физический
смысл дефокусировки заключается в
ослаблении высоких пространственных
частот изображения в результате спада
функции
— функция Бесселя
первого рода; а —
параметр дефокусировки. Физический
смысл дефокусировки заключается в
ослаблении высоких пространственных
частот изображения в результате спада
функции
![]() ,
что приводит к уменьшению четкости
воспроизведения мелких деталей. При
сильной дефокусировке ослабление частот
носит периодический характер.
,
что приводит к уменьшению четкости
воспроизведения мелких деталей. При
сильной дефокусировке ослабление частот
носит периодический характер.
Скоростной сдвиг изображения (смаз). Если объект и съемочная камера в процессе экспозиции движутся относительно друг друга с постоянной скоростью, то результирующее изображение оказывается «смазанным», на нем будут наложены различные участки объекта. Передаточная функция в такой системе оказывается равной
![]()
где а —параметр, определяемый скоростью движения.
Идеальное
дифракционное ограничение.
Представим себе, что
система формирования не пропускает
пространственные частоты изображения
выше некоторой частоты
![]() ;
причем спектр самого изображения
простирается до некоторой предельной
частоты
;
причем спектр самого изображения
простирается до некоторой предельной
частоты
![]() .
.
Тогда
![]() для такой системы определяется следующим
образом:
для такой системы определяется следующим
образом:
или
или
![]()
где rect — прямоугольное окно, определяемое правой частью выражения .
В пространственной области действие системы с передаточной функцией вида (1.24) эквивалентно свертке с весовой функцией вида
![]()
Атмосферная турбулентность при длительной экспозиции. Представим себе, что производится наблюдение некоторого удаленного объекта через слой турбулентной атмосферы, причем время наблюдения велико по сравнению с постоянной времени изменений в атмосфере, т. е. регистрация производится за время, в течение которого передаточная функция атмосферы успевает многократно измениться. Тогда передаточная функция «средней» атмосферной турбулентности определяется выражением
![]()
Часто
на практике показатель степени в опускают
и считают, что
![]() может быть аппроксимирована гауссовой
кривой, дисперсия которой σ2
является функцией атмосферных условий
в районе наблюдения. Отметим, что
гауссовская аппроксимация передаточных
функций широко распространена и
встречается в рентгенографии, электронной
микроскопии и ряде других областей.
может быть аппроксимирована гауссовой
кривой, дисперсия которой σ2
является функцией атмосферных условий
в районе наблюдения. Отметим, что
гауссовская аппроксимация передаточных
функций широко распространена и
встречается в рентгенографии, электронной
микроскопии и ряде других областей.
Синтез и реализация двумерных фильтров
Синтез двумерных цифровых фильтров существенно отличается от синтеза одномерных. В одномерном случае задачи синтеза фильтра и его схемной реализации четко разделены. Сначала выполняется синтез фильтра, а затем с помощью соответствующих преобразований передаточной функции определяются коэффициенты, необходимые для построения конкретной схемной реализации. В двумерном случае ситуация совершенно иная из-за того, что многомерные полиномы в общем случае нельзя разложить на множители. Это значит, что нет возможности в общем случае менять форму произвольной передаточной функции для согласования ее с требованиями схемной реализации. Если мы в состоянии реализовать только передаточные функции, разложимые на множители, то и метод синтеза должен приводить только к фильтрам этого класса. Это обстоятельство усложняет задачу проектирования фильтров и сокращает число практически приемлемых реализаций.
КИХ-фильтр (фильтр с конечной импульсной характеристикой), называемый также нерекурсивным, — это фильтр, импульсный отклик которого содержит лишь конечное число ненулевых отсчетов. Такой импульсный отклик всегда абсолютно суммируем, и, следовательно, КИХ-фильтры всегда устойчивы. КИХ-фильтры имеют также то преимущество, что их работу легче понять как в одномерном, так и в многомерном случае.
БИХ-фильтр (фильтр с бесконечной импульсной характеристикой), или рекурсивный, — это фильтр, входной и выходной сигналы которого удовлетворяют многомерному разностному уравнению конечного порядка. Такие фильтры могут быть как устойчивыми, так и неустойчивыми, однако во многих случаях они оказываются проще в реализации, чем эквивалентные КИХ-фильтры. Синтез двумерного рекурсивного фильтра радикально отличается от синтеза одномерного фильтра. Отчасти это связано с возрастанием сложности обеспечения устойчивости.
КИХ-фильтры
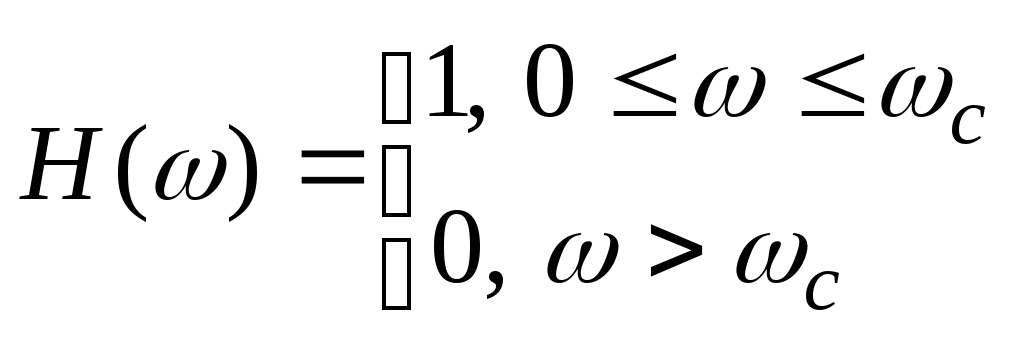
Одно из важнейших преимуществ КИХ-фильтров перед БИХ-фильтрами заключается в возможности синтеза и практической реализации КИХ-фильтров с чисто вещественными частотными откликами. Такие фильтры называются фильтрами с нулевой фазой (Строго говоря, чисто вещественный частотный отклик может содержать отрицательные значения амплитуды на некоторых частотах, что соответствует значению фазы л, а не 0. Несмотря на это, термин «фильтр с нулевой фазой» традиционно включает все чисто вещественные частотные отклики.).
В частотной области условие нулевой фазы можно выразить следующим образом:
![]() =
=
![]() .
(3.1)
.
(3.1)
Выполнив обратное преобразование Фурье от обеих частей равенства (3.1), для импульсного отклика фильтра с нулевой фазой получим требование симметрии в пространственной области
![]() =
=
![]() (3.2)
(3.2)
Очевидно, что КИХ-фильтр может удовлетворять этому условию, если центр его опорной области совпадает с началом координат.
Фильтры с нулевой фазой важны для многих приложений цифровой обработки многомерных сигналов. Например, при обработке изображений фильтры с ненулевой фазой могут привести к разрушению линий и границ. Чтобы понять, почему это так, вспомним из нашего обсуждения преобразований Фурье, что любой сигнал можно представить в виде суперпозиции комплексных синусоид.
Линейный инвариантный к сдвигу фильтр с нетривиальным частотным откликом будет избирательно усиливать или ослаблять некоторые из этих синусоидальных компонент, а также задерживать некоторые компоненты по отношению к другим. На любой частоте величина задержки зависит от значения фазового отклика. Нелинейный фазовый отклик приводит, таким образом, к рассеянию строго согласованных синусоидальных компонент сигнала, составляющих контрастные точки, линии и границы.
Фильтр с нулевой фазой имеет и другие преимущества. В силу вещественности его частотного отклика упрощается синтез фильтра. К тому же симметрию импульсного отклика фильтра можно использовать при его реализации для уменьшения требуемого числа умножений.
Реализация КИХ-фильтров путем прямой свертки. Выходной сигнал любого ЛИС-фильтра можно получить из входного с помощью свертки по формуле скользящего суммирования
![]()
Импульсный отклик КИХ-фильтра содержит лишь конечное число ненулевых отсчетов, и пределы суммирования в (3.3) конечны. В этом случае формула скользящего суммирования представляет собой алгоритм, позволяющий вычислить последовательные выходные отсчеты фильтра. Если, например, предположить, что фильтр обладает опорной областью {(n1, n2): 0<=n1<N1, 0<=N2}, то для вычисления выходных отсчетов можно воспользоваться соотношением

Если в наличии имеются все входные отсчеты, то выходные отсчеты можно вычислять в любом порядке; их можно вычислять и одновременно. Если требуются только определенные отсчеты выходного сигнала, то можно ограничиться вычислением лишь этих отсчетов. Однако для получения каждого выходного отсчета требуется выполнить N1N2 умножений и N1N2 -1 сложений.
При вычислении
![]() используются
значения входных отсчетов из N1-1
«предыдущих» столбцов и N2-1
«предыдущих» строк. Если входные отсчеты
поступают строка за строкой, требуется
память, достаточная для хранения N2
строк входной последовательности. Если,
наоборот, на вход поступают столбец за
столбцом, необходима память для хранения
N1 входных столбцов.
используются
значения входных отсчетов из N1-1
«предыдущих» столбцов и N2-1
«предыдущих» строк. Если входные отсчеты
поступают строка за строкой, требуется
память, достаточная для хранения N2
строк входной последовательности. Если,
наоборот, на вход поступают столбец за
столбцом, необходима память для хранения
N1 входных столбцов.
Фильтр с нулевой
фазой с вещественным импульсным откликом
удовлетворяет условию
![]() ,
т. е, каждому отсчету соответствует
парный ему отсчет с тем же значением. В
этом случае, воспользовавшись свойством
дистрибутивности сложения, можно
поменять местами некоторые операции
умножения и сложения в формуле (3.3), чтобы
уменьшить их число, однако количество
умножений, требуемых для реализации
фильтра, все еще остается пропорциональным
порядку фильтра.
,
т. е, каждому отсчету соответствует
парный ему отсчет с тем же значением. В
этом случае, воспользовавшись свойством
дистрибутивности сложения, можно
поменять местами некоторые операции
умножения и сложения в формуле (3.3), чтобы
уменьшить их число, однако количество
умножений, требуемых для реализации
фильтра, все еще остается пропорциональным
порядку фильтра.
Синтез КИХ-фильтров с использованием окон
Метод окон,
используемый при синтезе многомерных
КИХ-фильтров, принципиально не отличается
от своего одномерного аналога. Этот
метод работает в пространственной
области и направлен на аппроксимацию
не идеального частотного, а идеального
импульсного отклика. Пусть
![]() и
и
![]() — импульсный и частотный отклики
идеального фильтра, a
— импульсный и частотный отклики
идеального фильтра, a
![]() и
и
![]() — импульсный и частотный отклики
синтезированного фильтра. Ненулевые
отсчеты
— импульсный и частотный отклики
синтезированного фильтра. Ненулевые
отсчеты
![]() расположены в некоторой опорной области
конечной протяженности R.
При использовании метода окон коэффициенты
расположены в некоторой опорной области
конечной протяженности R.
При использовании метода окон коэффициенты
![]() определяются соотношением
определяются соотношением
![]()
Последовательность
![]() носит название функции окна (весовая
функция).
носит название функции окна (весовая
функция).
Часто в процессе
синтеза фильтра его требуемые свойства
описываются с помощью
![]() ,
а не
,
а не
![]() .
В этих случаях нужно либо вычислить
.
В этих случаях нужно либо вычислить
![]() аналитически, либо аппроксимировать
путем дискретизации
аналитически, либо аппроксимировать
путем дискретизации
![]() и
выполнить обратное ДПФ. Поскольку
опорная область
и
выполнить обратное ДПФ. Поскольку
опорная область
![]() в общем случае имеет бесконечную
протяженность, это приводит к искажению
функции
в общем случае имеет бесконечную
протяженность, это приводит к искажению
функции
![]() вследствие
пространственного наложения. Для
уменьшения погрешности наложения
необходимо, чтобы размер опорной области
обратного ДПФ в несколько раз превышал
опорную область R.
вследствие
пространственного наложения. Для
уменьшения погрешности наложения
необходимо, чтобы размер опорной области
обратного ДПФ в несколько раз превышал
опорную область R.
Выбор функции окна
Выбор функции окна обусловливается тремя требованиями.
Во-первых, окно должно иметь опорную область R.
Во-вторых, чтобы
отклик
![]() хорошо аппроксимировал
хорошо аппроксимировал
![]() ,
функция
,
функция
![]() должна
аппроксимировать двумерную импульсную
функцию. Наконец, если требуется получить
отклик
должна
аппроксимировать двумерную импульсную
функцию. Наконец, если требуется получить
отклик
![]() с нулевой фазой, окно должно удовлетворять
условию нулевой фазы
с нулевой фазой, окно должно удовлетворять
условию нулевой фазы
![]()
Все эти требования не отличаются от требований к одномерным окнам, поэтому последние часто служат основой для выбора двумерных окон. Обычно для этого используется один из двух способов.
В первом способе двумерное окно с квадратной или прямоугольной опорной областью формируется как прямое произведение двух одномерных окон:
![]()
Второй способ, предложенный Хуангом, предусматривает формирование двумерного окна с помощью дискретизации поверхности, полученной вращением вокруг своей оси одномерной непрерывной функции окна
Формируемые таким образом двумерные окна характеризуются почти круговой опорной областью.
Фурье-спектр функции wc(n1, n2) напоминает поверхность, полученную вращением вокруг своей оси одномерного фурье-спектра функции w (t), хотя и отличается от него в деталях.
Если w(t),
![]() являются
хорошими (т. е. удовлетворяющими всем
нашим критериям) одномерными окнами,
то ωc и ωr
также будут хорошими окнами.
Практически можно использовать целый
ряд одномерных окон.
являются
хорошими (т. е. удовлетворяющими всем
нашим критериям) одномерными окнами,
то ωc и ωr
также будут хорошими окнами.
Практически можно использовать целый
ряд одномерных окон.
Трехмерная обработка сигналов
Геофизика – анализ естественных сейсмосигналов для контроля и предсказания землетрясений, обработки результатов сейсморазведки для описания геологической структуры под поверхностью. Применяемые алгоритмы:
взаимная корреляция и автокорреляция;
фильтрация;
восстановление из свертки в частотной области;
двумерное ДПФ для восстановления распределения отражений из проекций, размер 103x103.
Медицина, биология – анализ кардиограмм и энцефалограмм при полосе сигнала до 100 кГц., томографические исследования(УЗИ,ЯМР), полоса сигнала до 10 МГц.
Технические средства реализации основных алгоритмов обработки сигналов
Обработка выполнялась на основе следующих электрические элементов:
-
активные (генерирующие электрическую энергию) – управляемые и неуправляемые источники тока и напряжения,
-
пассивные - резисторы, конденсаторы и индуктивности.
Примеры:
Интегратор. Дифференциатор. Фильтр НЧ, ВЧ. Постоянная времени, частота среза, порядок фильтра.
Делитель.
Сумматор.
Выпускалась широкая номенклатура интегрированных элементов позволяющих выполнять различные арифметические и логические преобразования непрерывных сигналов: интегрирование, дифференцирование, суммирование, умножение, деление, возведение в 2 и 3 степень, корень, логарифмирование, сравнение, коммутация сигналов. Достоинствами являются быстродействие и простота, но существенный недостаток это низкая точность и зависимость от внешних воздействий (температура, питание и пр.).
Методы цифровой обработки разрабатывались с 60-х годов 20ст. с целью использования цифровых вычислительных систем для моделирования реальных физических сигналов и систем. В результате значительная часть теории цифровых систем строилась по образу теории аналоговых систем: терминология, методы расчета по аналоговому прототипу и пр.
Практически все физические сигналы являются непрерывными функциями и проблема корректного отображения в цифровую форму одна из центральных. Цифровые сигналы являются подмножеством непрерывных сигналов, что создает как преимущества, так и недостатки. Преимущества цифровых систем обработки заключаются, прежде всего, в помехоустойчивости и точности, что позволяет обеспечить высокие показатели качества передачи и воспроизведения сигнала, а также в возможности длительного хранения больших количеств данных. Недостатками являются снижения быстродействия и повышение требований к производительности линий связи. Основные векторы развития это повышение быстродействия и функциональности (степень интегрирования и гибкость модификации выполняемых функций), снижение стоимости элементов и сложности использования (последнее с переменным успехом).
Преобразование непрерывных сигналов в цифровые и обратно выполняется с помощью АЦП, ЦАП. Представление сигналов в виде цифровых данных позволяет использовать для их обработки цифровые процессоры и описывать операторы как алгоритмы, которые выполняются с помощью элементарных операций ЦОС сложения, умножения на константу и линейного сдвига. Также используются операции вычисления модуля, квадрата, логарифма, тригонометрических функций, реализация которых обычно выполняется с помощью приближенных выражений или таблично (Будет разобрано на практических занятиях). Базовая операция цифровой фильтрации, определяющая структуру аппаратных средств – умножение на коэффициент с накоплением.
Пример:
НЧ сигнал с небольшой ВЧ составляющей(или шума)
Интегрирование – удаление ВЧ (скользящее суммирование соседних отсчетов).
Дифференцирование – удаление НЧ (скользящее вычитание соседних отсчетов).
Интегрирование с весовой функцией(свертка)
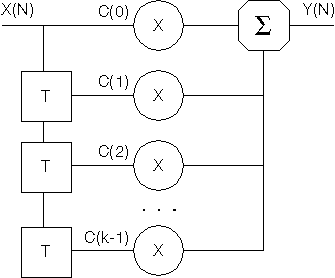
Схема цифровой фильтрации - КИХ – цифровой фильтр с конечной импульсной характеристикой.
![]()
если h(n) - массив констант, то выполнение свертки реализует цифровой фильтр, который при изменении значений массива позволяет произвести нужные изменения сигнала;
если h(n)=х(n), то выполнение свертки дает информацию о структуре сигнала и его поведении во времени; если x(n)=х1(n), а h(n)=х2(n), то выполнение свертки дает информацию о величине сходства сигналов и его изменения во времени.
В настоящее время для реализации алгоритмов обработки используются цифровые сигнальные процессоры (ЦСП) и ПЛИС (Будет разобрано на практических занятиях).
Достоинствами ЦСП являются возможность построения сложных алгоритмов, точность. Вместе с тем ЦСП имеют и ряд недостатков. Во-первых, производительность ЦСП обычно не превышает нескольких сот MIPS, что ограничивает их область применения. При реализации сложных структур или высоких требованиях к производительности приходится увеличивать число процессоров и обеспечивать их работу в мультипроцессорном режиме. Во-вторых, каждое семейство ЦСП имеет собственные системы команд и архитектуру АЛУ, поэтому необходима тщательная адаптация алгоритма под ресурсы конкретного ЦСП. Даже ориентированные на конкретные ЦСП компиляторы с языков высокого уровня не снимают данную проблему.
До недавнего времени качество ЦСП определялось только скоростью выполнения операций умножения/сложения или количеством операций в секунду. Однако сегодня, на первое место выходят другие требования. Они связаны с архитектурными решениями процессора и расширенными функциональными возможностями - наличием высокоскоростных гибких арифметических средств, встроенных и внекристальных средств циклической буферизации и т. п.
Альтернативой ЦСП являются ПЛИС (программируемые логические интегральные схемы). В числе главных достоинств возможность создания оптимальной вычислительной архитектуры, возможность реализации сложных параллельных алгоритмов. Современные САПР позволяют проводить полное моделирование систем и обеспечивается совместимость на уровне языков описания аппаратуры (VHDL, Verilog и др.) и наличие библиотек программ, описывающих сложные алгоритмы(Core).
Наиболее производительны системы обработки с целочисленными операндами (фиксированная точка - ФТ), но т.к. практически все сигналы имеют непрерывную природу (речь, изображения, параметры естественных и технических систем), то широко применяются вычисления с плавающей точкой (ПТ). ЦСП ориентировано на обработку небольших потоков данных с высокой точностью (с ПТ), а ПЛИС на обработку больших потоков данных с ограниченной точностью (с ФТ и числом разрядов до 16).
На современном этапе практически происходит сращивание этих технологий в ПЛИС встраиваются процессоры и к процессорам добавляется конфигурируемое АЛУ для оптимизации выполнения алгоритма.