

3.2.2. Построение шпангоутов
3.2.2.1. Выделяем шпангоут №1 на проекции «Корпус» и перемещаем его на проекцию «Полуширота»: Редактир. (Modify)→ Переместить (Move)→ КС: Укажите базовую точку…: в панели ОП включаем привязку «Конточка» («Endpoint») → указываем на проекции «Корпус» точку пересечения ВЛ 0 с линией ДП на проекции «Корпус»; → КС: Укажите вторую точку…: в панели ОП включаем привязку «Конточка» («Endpoint») → указываем на проекции «Полуширота» точку пересечения линии ДП со шп. №1.
Аналогично перемещаем остальные шпангоуты ( базовая точка та же) во вторую точку - в точку пересечения линии ДП с соответствующими шпангоутами на проекции «Полуширота».
3.2.2.2. Выделяем перенесенные шпангоуты и переносим их на слой «Каркасная модель» как в п. 3.2.1.2.
3.2.2.3. Переходим к виду Ю-В Изометрия (S Е Isometric)Повторяем действия 3.2.2.1. – 3.2.2.2. для кормовых шпангоутов.
3.2.3. Построение ватерлиний
3.2.3.1. Выделяем линию ВП на проекции «Полуширота» и переносим ее вверх на уровень ее положения на проекции «Корпус»: Редактир. (Modify)→ Переместить (Move)→ КС: Укажите базовую точку…: в панели ОП включаем привязку «Конточка» («Endpoint») → указываем на проекции «Корпус» точку пересечения ВЛ 0 с линией ДП на проекции «Корпус»; → КС: Укажите вторую точку…: в панели ОП включаем привязку «Конточка» («Endpoint») → указываем на проекции «Корпус» точку пересечения линии ДП с ВП. Аналогично перемещаем ВЛ №1, ВЛ№2 и т.д. ВЛ№0 оставляем на месте.
3.2.3.2. Выделяем перенесенные ватерлинии и переносим их на слой «Каркасная модель» как в п. 3.2.1.2.
3.2.3.3. Переходим к виду Ю-В Изометрия (S Е Isometric)Повторяем действия 3.2.3.1. – 3.2.3.2. для кормовых ватерлиний.
3.2.4. Проведение недостающих линий на батоксов ватерлиний и шпангоутов
3.2.4.1. Убираем видимость всех слоев кроме слоя «Каркасная модель».
3.2.4.2. Проводим линии, соединяющие нижние концы батоксов, указывая в ОП привязку «Кон. точка» (« End point»). Соединяем также между собой нижние точки обводов носовой и кормовой оконечности.
3.2.4.3. Проводим линии, соединяющие внутренние концы ватерлиний , указывая в ОП привязку «Кон. точка» (« End point»).
3.2.4.4. Проводим вертикальные линии недостающих частей шпангоутов используя для первой точки линии в ОП привязку «Кон. точка», а для второй –привязку «Перпендикуляр». Линии проводятся вертикально от верхних концов шпангоутов, недостающих до ВП перпендикулярно к линии ВП. В результате получаем окончательный вид половины каркасной модели, показанный рис. 3.2.
3.2.5. Построение полной каркасной модели
3.2.5.1.
Зеркально отражаем обводы левого борта
относительно плоскости ДП: Выделяем
все видимые
линии → Редактир.
(Modify)→3М
Операции (3D
Operations)
→ Зеркало 3 М (Mirror
3D);
→ КС:
Укажите…
…плоскость зеркала...[…/XY/YZ/ZX/…]:
zx
![]() ;КС:
Укажите точку
на плоскости (Specify
point on ZX plane <0,0,0>):
;КС:
Укажите точку
на плоскости (Specify
point on ZX plane <0,0,0>):
![]() ;→;КС:
Удалить
исходный объект? (Delete source objects? [Yes/No])
<N>
;→;КС:
Удалить
исходный объект? (Delete source objects? [Yes/No])
<N>
![]() .
.
3.2.5.2. Рассматриваем полученную каркасную модель с разных точек зрения: Вид→ 3М Орбита (3D Orbit) →изменяем положение точки зрения, перемещая курсор по экрану. Работа предъявляется преподавателю.
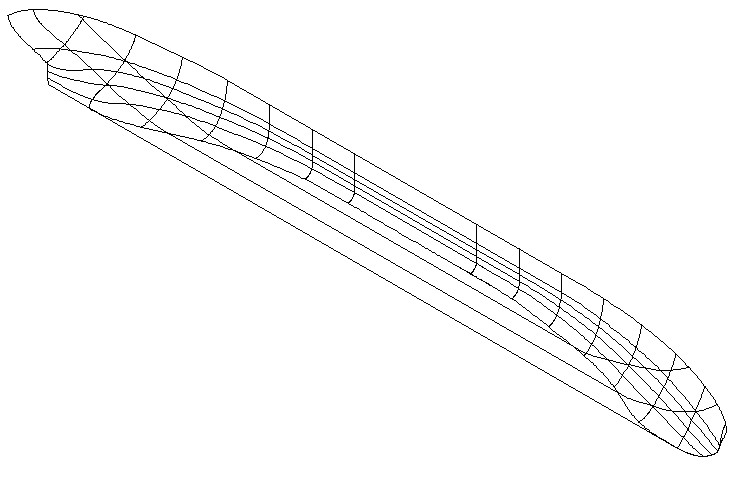
Рис. 3.2 Половина завершенной каркасной модели
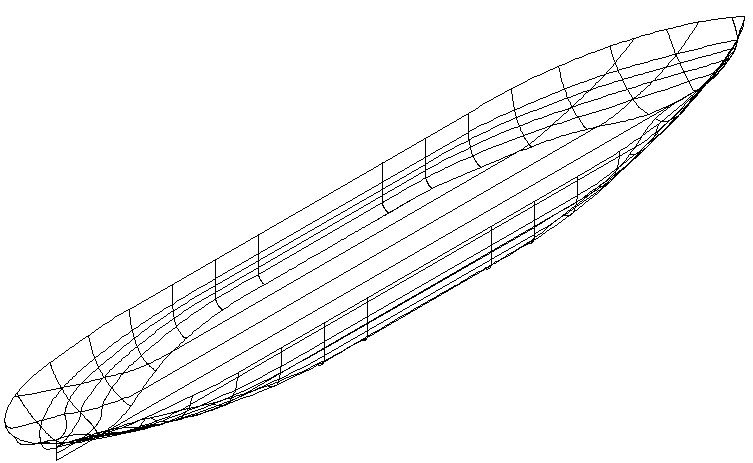
Рис. 3.3 Полный вид каркасной модели
3.2.5.3. Переходим к виду → Ю-З Изометрия (S W Isometric) и сохраняем чертеж.