

Начертательная геометрия
.pdfКРИВЫЕ ПОВЕРХНОСТИ
Общие сведения: определения, классификация , термины
В начертательной геометрии поверхность определяется как след движущейся в пространстве линии, называемой образующей [12]. Такое представление об образовании поверхности удобно для графических по-
строений. |
|
У |
Представление об образовании поверхности непрерывным движением |
||
линии позволяет такие поверхности называть кинематическими. При этом |
||
|
Т |
|
линия, образующая поверхность, может во время движения деформиро- |
||
ваться. Тогда говорят о поверхности с «переменной образующей». |
|
|
Образующая линия может быть прямой или кривой.
Закон движения образующей может быть задан другими линиями, на-
зываемыми направляющими поверхности. По ним образующая в процессе |
||||
своего движения скользит. |
|
|
|
|
Поверхность, которая образована движением прямойНлинии, называют |
||||
линейчатой поверхностью. Таким образом, линейчатая поверхность пред- |
||||
ставляет собой геометрическое место прямых |
|
. |
||
|
|
|
Б |
|
Поверхность, которая образована движением кривой линии, называют |
||||
нелинейчатой поверхностью. Примерами такой поверхности является сфе- |
||||
ра, тор и др. |
|
линий |
|
|
Одна и та же поверхность |
быть образована перемещением раз- |
|||
личных линий и согласно различнымусловиям движения, то есть законы |
||||
образования поверхности в ряде случаев могут быть разнообразными. Для |
||||
|
р |
|
|
|
решения геометрических задач, как правило, используют наиболее простой |
||||
точками з тяжений. Такиеоповерхности называют развертываемыми. К ним относят-
или удобный закон задания поверхности. |
|
|
может |
Некоторые кр вые поверхности могут быть развернуты так, что сов- |
|
местятся все сво м |
т |
с плоскостью без разрывов, складок, или рас- |
|
ся только линейчатые поверхности, причем такие, у которых смежные прямолинейныеп бразующие параллельны, или пересекаются между собой, или являются касательными к некоторой пространственной кривой.
щиеВсе кривые нелинейчатые поверхности и те линейчатые, которые не могут быть развернуты в плоскость, называются неразвертывающимися
Р(или косыми).
Задать поверхность на чертеже – значит указать условия, позволяюпостроить каждую точку этой поверхности. Для задания поверхности достаточно иметь проекции направляющих линий (одной или нескольких) и указать, как строится образующая линия. Для придания же изображениям поверхности наглядности вычерчивают еще и ее очерк, показывают несколько промежуточных положений образующих поверхности, отображая,
таким образом, поверхность в виде каркаса.
190
О б з о р |
некоторых кривых |
поверхностей , |
их |
изо - |
|||||||||||||||
бражение на чертеже |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1. Поверхности линейчатые развертываемые. |
|
|
|
|
|
|
|
|
|
|
|||||||||
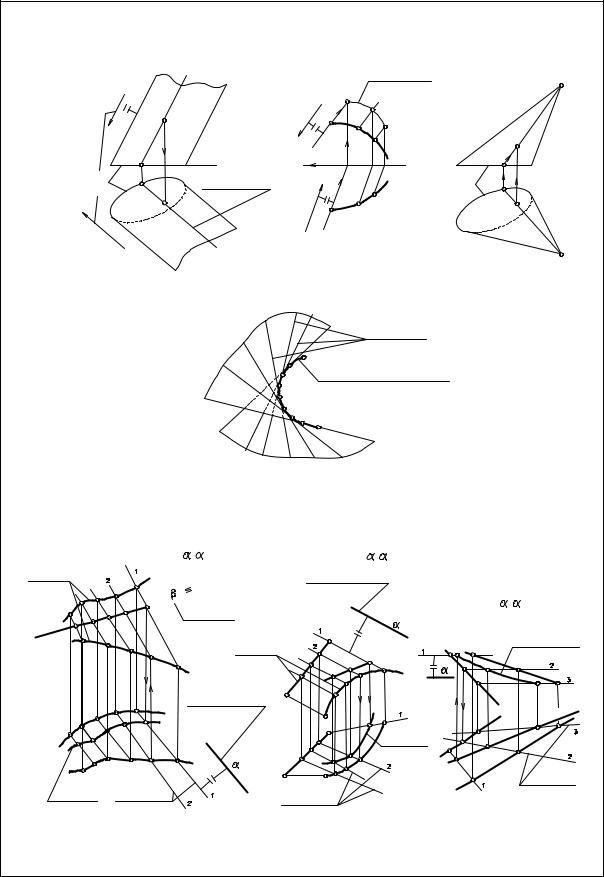
1.1. Цилиндрическая поверхность. Образуется движением прямой ли- |
|||||||||||||||||||
нии l по криволинейной направляющей n и остающейся во всех своих поло- |
|||||||||||||||||||
жениях параллельной некоторой заданной прямой линии S (рис. 11.9). |
|
||||||||||||||||||
1.2. Коническая |
по- |
|
|
|
|
|
|
|
1" |
|
|
|
|
|
|
||||
верхность. |
Образуется |
|
|
n |
|
S" |
|
|
|
2" |
n" |
|
|
|
|||||
движением |
прямой |
ли- |
S |
|
|
|
|
|
|
|
|
3"4" |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
нии l по криволинейной |
l |
|
|
|
|
|
l1" |
|
|
|
|
5" 6" |
8" |
||||||
направляющей |
и |
прохо- |
|
|
|
|
|
|
|
|
|
|
|
7" |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
дящей во всех своих по- |
|
|
nH |
x |
V |
|
|
|
|
|
lH5 lH6 |
У |
|||||||
ложениях через некото- |
lH |
|
|
|
H |
|
lH3 lH4 |
|
lH7 |
|
|||||||||
рую неподвижную |
точ- |
|
|
|
|
|
|
|
|
|
lH8 |
8' |
|||||||
|
|
|
|
|
|
lH2 |
|
|
Т6'7' |
||||||||||
ку S, называемую верши- |
|
|
|
H |
lH1 |
|
nH |
3' |
4' |
5' |
|
|
|||||||
ной конической поверх- |
|
|
|
|
|
|
|
|
|
n' |
|
|
|
||||||
|
|
|
|
|
|
|
2' |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ности(рис. 11.10). |
|
|
|
|
|
|
|
|
|
Н |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1' |
|
|
|
|
|
|
|||
Линия, |
получаемая |
|
След цилиндрической |
|
|
|
l1' |
|
|
|
|
||||||||
при пересечении цилинд- |
|
|
|
|
БS' |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
рической или конической |
|
|
а |
|
Рис. 11.9 |
|
|
|
|
б |
|
||||||||
поверхностей |
с плоско- |
|
|
|
|
|
|
|
|
|
|
|
|||||||
стью, называется следом поверхности. На |
й |
|
|
|
|
|
|
|
|
|
|||||||||
с. 11.9, а и рис. 11.10, а показаны |
|||||||||||||||||||
следы этих поверхностей в прост анстве. |
|
|
|
|
|
|
|
|
|
|
|
||||||||
На рис. 11.9, б показано п ст |
поверхности |
|
|
|
|
|
|
|
|
|
|
||||||||
ение на чертеже горизонтального сле- |
|||||||||||||||||||
да nH цилиндрической п верхн |
рсти посредством |
семейства |
|
произвольно |
|||||||||||||||
задаваемых образующих l, параллельных прямой S, определяющей их |
|||||||||||||||||||
направление. След nH пос |
роенпо точкам lH1, lH2, lH3, |
… , |
lH8, |
являющимся |
|||||||||||||||
горизонтальными |
|
|
|
образующих. |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для построен я недостающих проекций точек, принадлежащих ци- |
|||||||||||||||||||
линдрической или конической поверхности, также используют их обра- |
|||||||||||||||||||
зующие. |
|
|
следами |
|
|
|
|
|
S |
|
|
|
|
|
S" |
||||
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
На рис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
11.10, б показано |
|
|
|
|
|
|
|
|
|
|
l" |
|
|||||||
|
нед стающей фрон- |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
тальной A"роекции |
точки A(A') |
|
|
|
|
|
|
|
|
|
1" |
n" |
|||||||
поср дством промежуточной об- |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
п |
|
|
|
|
|
|
|
n |
|
|
|
|
|
A" |
|
|
|
||
разующ й l(l',l"). Вначале строят |
|
|
|
|
|
|
|
|
|
|
|||||||||
ту проекцию образующей l, на |
|
|
|
|
|
x V |
|
|
|
|
|
|
|||||||
построение |
|
|
|
|
|
|
|
|
nH |
|
|
H |
|
|
|
|
|
|
|
которой находится заданная про- |
|
|
|
|
|
|
|
|
|
|
|||||||||
Рекция A' точки, то есть в данном |
|
H |
|
|
|
|
|
A' |
1' |
|
n' |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
случае – горизонтальную проек- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
цию l'. Затем, |
используя |
точку |
|
След конической |
|
|
|
|
|
|
|
|
l' |
|
|||||
пересечения 1(1',1") этой обра- |
|
поверхности |
|
|
|
|
|
|
|
|
S' |
||||||||
зующей с направляющей кривой |
|
|
а |
|
|
|
|
|
|
|
б |
|
|
||||||
линией n(n',n"), строят фронталь- |
|
|
|
Рис. 11.10 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
191 |
ную проекцию l" образующей, и посредством линии связи находят искомую |
|||||||||||||||||
недостающуюпроекциюточкиA". |
|
|
|
|
|
|
|
||||||||||
|
1.3. Поверхность с ребром возврата (торсовая). Образуется непрерыв- |
||||||||||||||||
ным движением прямолинейной образующей l, во всех своих положениях ка- |
|||||||||||||||||
сающихся некоторой пространственной кривой n. Эта пространственная кри- |
|||||||||||||||||
|
|
|
|
Ребро возврата |
|
|
|
|
|
вая является для данного |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
l" |
типа |
поверхностей |
на- |
||
|
|
|
|
|
|
|
|
|
|
1" |
|
n" |
правляющей. Ее называ- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ют ребро возврата. |
|
|||
|
|
|
|
|
|
|
|
A" |
|
|
|
|
|
На рис. 11.11, а тор- |
|||
|
|
n |
|
|
|
l |
|
|
|
|
|
|
совая поверхность пока- |
||||
|
|
|
|
|
x V |
|
|
|
|
зана в пространстве и по- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
казан ее след nH |
У |
|||||
|
|
|
|
|
|
|
|
H |
|
|
|
|
как ли- |
||||
|
|
nH |
|
|
|
lH |
|
|
|
|
|
ния пересеченияТповерх- |
|||||
|
|
|
|
|
|
|
H |
A' |
|
|
|
|
ности с некоторой гори- |
||||
|
|
|
|
|
|
|
|
|
|
|
зонтальной |
плоскостью |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1' |
|
n' |
|
Н |
|
|
|
|
|
След торсовой |
|
|
|
|
l' |
H. На рис. рис. 11.11, б |
|||||||||
|
|
|
|
|
|
|
приведен чертеж торсо- |
||||||||||
|
|
поверхности |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
а |
|
|
|
|
|
б |
|
Б |
|
|
|
|
|
|
|
|
|
|
Рис. 11.11 |
|
|
вой поверхности и пока- |
||||||||
|
|
|
|
|
|
|
|
|
|
зано |
построение |
недо- |
|||||
стающей горизонтальной проекции A' |
|
надлежащей ей точки A(A"). |
Для |
||||||||||||||
построения использовалась об азующая l(l',l"), задаваемая через заданную |
|||||||||||||||||
проекцию точки A" касательно к |
еб у возв ата поверхности в точке 1(1',1"). |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
2. Поверхности линейчатые не азве тываемые. |
|
|
|
|
||||||||||||
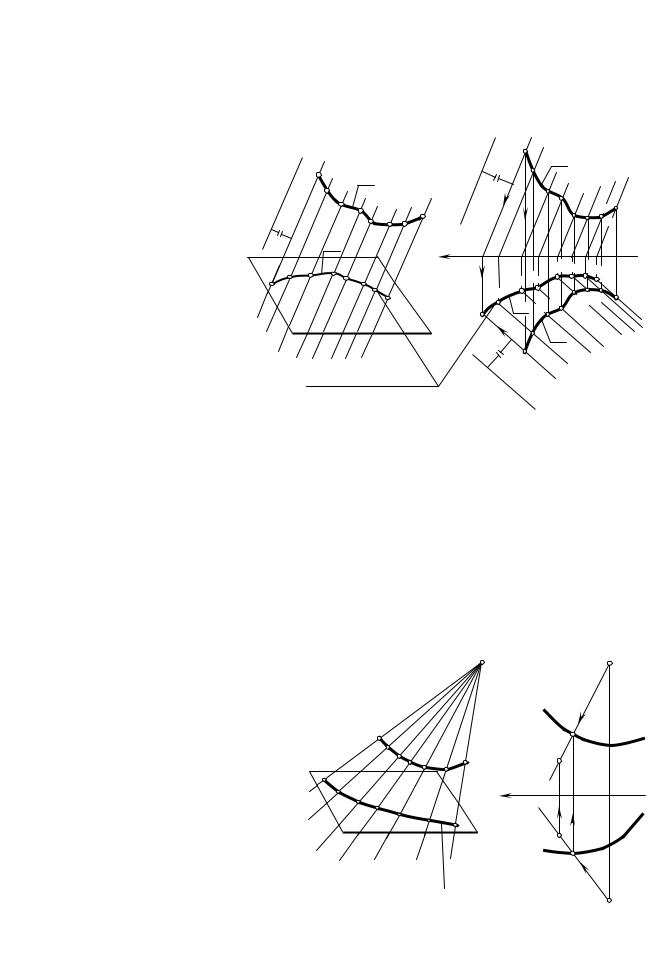
|
2.1. Поверхностисплоск с |
|
ьюпараллелизма. |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
пр |
|
|
|
|
|
|
|
Плоскость |
|
|
|
|
|
Цилиндроид и коноид – это поверхности, обра- |
|||||||||||
|
|
|
|
|
|
движением прямолинейной образующей |
|||||||||||
параллелизма |
|
Семейство |
|
|
|||||||||||||
|
зованные |
|
|
|
|
|
|
|
|||||||||
|
|
αV |
|
|
( |
адаётся) х тпо двум направляющим, и остающейся во всех |
|||||||||||
|
|
|
|
|
|
|
n" |
сво х положениях параллельной некоторой задан- |
|||||||||
|
|
|
A" |
|
|
ной плоскости, называемой плоскостью паралле- |
|||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
m" |
|
образующ |
лизма. В качестве плоскости параллелизма может |
||||||||||||
Линия |
|
задаваться некоторая проецирующая плоскость (ее |
|||||||||||||||
|
о |
|
след указывается на чертеже, рис. 11.12) или ого- |
||||||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
варивается, что плоскостью параллелизма является |
|||||||||||||
|
|
п |
|
|
|||||||||||||
|
|
|
|
однаизплоскостей проекций(рис. 11.13). |
|
|
|||||||||||
|
|
|
|
|
Всякая плоскость, параллельная плоскости |
||||||||||||
сечения |
|
|
|
|
n' |
|
|||||||||||
|
|
|
|
параллелизма, пересекает цилиндроид или коно- |
|||||||||||||
A' |
|
|
|
|
ид по прямой линии – по образующей. Это свой- |
||||||||||||
Р |
|
m' |
|
|
|
βH |
ство используется при решении задач. |
|
|
||||||||
|
|
|
|
|
|
|
|
На рис. 11.12 показано построение недоста- |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
Семейство |
|
|
Секущая |
ющей фронтальной проекции точки A(A') на по- |
|||||||||||||
образующих |
|
|
плоскость |
верхности цилиндроида, заданного двумя направ- |
|||||||||||||
(построено) |
|
|
|
|
|
ляющими n(n',n") и m(m',m") и фронтально-про- |
|||||||||||
|
|
Рис. 11.12 |
|
|
|||||||||||||
|
|
|
|
ецирующей |
плоскость |
αV в |
качестве плоскости |
||||||||||
|
|
|
|
|
|
|
|
||||||||||
192 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параллелизма. Поскольку применить вышерассмотренный алгоритм, когда |
||||||||||||
было достаточно воспользоваться одной из образующих, в данном случае не |
||||||||||||
представляется возможным (не известно, как будет направлена образующая |
||||||||||||
через заданную проекцию A' точки), необходимо вначале построить семей- |
||||||||||||
ство образующих, задавая их фронтальные проекции параллельно следу |
||||||||||||
плоскости параллелизма αV (согласно закону образования поверхности ци- |
||||||||||||
линдроида). Построив обе проекции каркаса цилиндроида из образующих, |
||||||||||||
выполняют его сечение произвольной горизонтально-проецирующей плоско- |
||||||||||||
стью, проходящей через заданную проекцию A' |
H – плоскость параллелизма |
|||||||||||
точки. Затем строят фронтальную проекцию ли- |
|
|
|
|
n" |
|
|
|||||
нии сечения и на ней посредством линии связи |
l" |
2" |
|
A" |
|
|
1" |
|||||
находят искомую проекцию A" точки. |
|
|
|
|
|
m" |
У |
|||||
На рис. 11.13 показано построение недо- |
|
|
|
|
|
|
||||||
стающей горизонтальной проекции точки A, |
x V |
|
|
Т |
|
|||||||
принадлежащей поверхности коноида, заданно- |
H |
Н |
|
|
|
|||||||
го кривой n(n',n") и прямой m(m',m") направ- |
n' |
|
|
|||||||||
|
|
1' |
||||||||||
ляющими и плоскостью параллелизма, в каче- |
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
A' |
|
|
|
||||||
стве которой служит горизонтальная плоскость |
|
2' |
|
|
|
|
|
|||||
проекций H. Для этого через ее заданную про- |
Б |
|
|
|
|
|
||||||
l' |
|
|
m' |
|
|
|
||||||
екцию A" построена фронтальная проекц я об- |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
разующей l(l") |
коноида, |
занимающая |
|
зон- |
|
Рис. 11.13 |
|
|
|
|||
|
|
|
|
|
й |
|
|
|
||||
тальное положение. Затем по точкам пе есече- |
|
|
|
образующей |
||||||||
ния |
|
1(1") |
и |
|
2(2") |
|
|
|||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
с направляющими n(n',n") и m(m',m") пост оена горизонтальная проекция l' |
||||||||||||
образующей и на ней посредс в м линии связи найдена искомая горизон- |
||||||||||||
тальная проекция A' |
гор |
|
|
|
|
|
|
|
|
|||
. |
|
|
|
|
|
|
|
|
|
|||
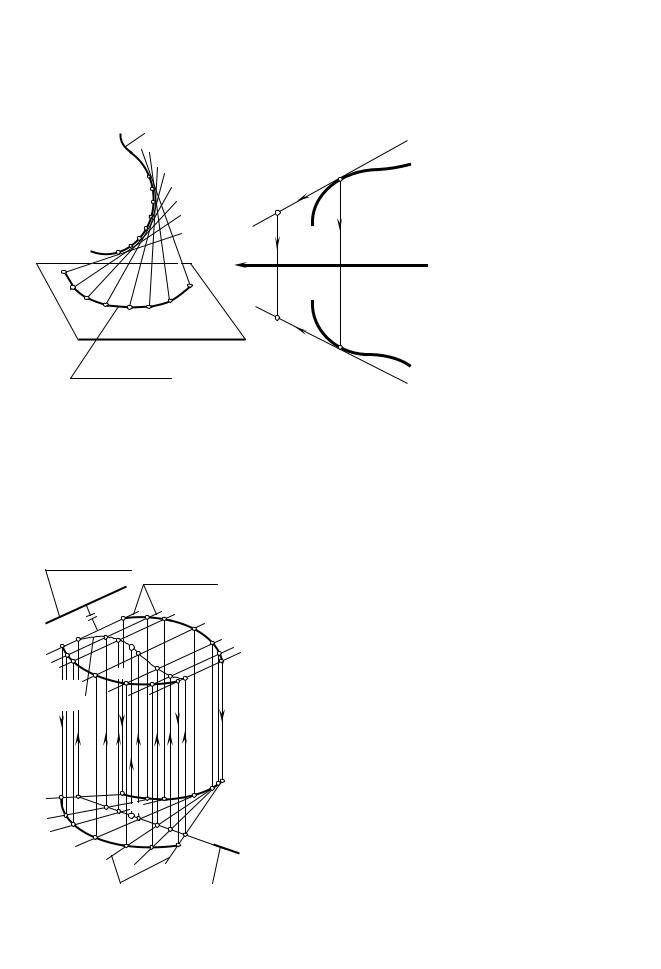
Гиперболическ й параболоидо(косая плоскость) образуется движением |
||||||||||||
прямолинейной образующейтпо двум скрещивающимся прямым направляю- |
||||||||||||
щим параллельно некоторой плоскости па- |
l" |
|
|
|
|
|
|
|
||||
раллелизма. Эту поверхностьточкиназывают так- |
|
1" |
|
|
|
|
|
|
||||
желинейчатымзпараболоидом. |
|
|
|
n" |
A" |
m" |
|
|
|
|||
На рис. 11.14 приведен чертеж рас- |
|
|
|
|
|
|
|
|
||||
сматриваем й |
верхности в виде каркаса |
|
|
|
|
|
|
|
|
|||
|
о |
|
|
|
|
|
|
2" |
|
|
|
|
из образующих. Поверхность задана двумя |
|
|
|
|
|
|
|
|||||
скр щивающимися в параллельных плос- |
x V |
|
|
|
|
|
|
|
||||
п |
|
|
|
|
|
|
|
|
|
|
|
|
костях прямыми направляющими n(n',n") |
H |
|
|
|
|
|
|
|
||||
и m(m',m") и |
горизонтально проецирую- |
|
A' |
|
2' |
|
|
|
||||
|
|
|
|
|
|
|||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l' |
|
|
|
|
m' |
|
|
|
щей плоскостью параллелизма αH. Там же |
1' |
|
|
|
|
|
||||||
показано построение недостающей фрон- |
|
|
|
|
|
|
|
|||||
Ртальной проекции A" точки A(A'), принад- |
|
n' |
|
|
|
|
|
|
||||
лежащей поверхности. Построение выпол- |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
нено посредством образующей l(l'), для че- |
|
|
|
|
|
|
αH |
|||||
го через заданную проекцию A' вначале |
|
|
|
|
|
|
|
|
||||
построена горизонтальная проекция l' обра- |
|
|
Рис. 11.14 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
193 |

зующей. Затем по точкам 1(1') и 2(2') ее пересечения с направляющими |
|||||||||||||
строят фронтальную проекцию образующей и отмечают на ней посредством |
|||||||||||||
линии связи искомую проекцию A" точки. |
|
|
|
|
|||||||||
|
Название рассмотренной поверхности «гиперболический параболоид» |
||||||||||||
связано с тем, что ее фронтальный очерк (касательная кривая к фронтальным |
|||||||||||||
проекциям образующих) представляет собой параболу (рис. 11.6). Такую же |
|||||||||||||
форму имеет и профильный очерк данной поверхности. Кроме того, линия се- |
|||||||||||||
чения данной поверхности горизонтальной плоскостью имеет форму гипер- |
|||||||||||||
болы (форму гиперболы имеет также горизонтальный след поверхности, ко- |
|||||||||||||
торый можно построить, если найти горизонтальныеследы ееобразующих). |
|||||||||||||
|
2.2. Поверхностьстремянаправляющими– однополостныйгиперболоид. |
||||||||||||
|
Эта линейчатая поверхность образуется при перемещении прямой об- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
разующей по трем скрещивающимся прямым направляющим, не параллель- |
|||||||||||||
ным одной плоскости. В частном случае линейчатая поверхность с тремя |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
направляющими пересекается плоскостью по гиперболе; отсюда и произо- |
|||||||||||||
шло ее название – однополостный гиперболоид [23] (однополостный ги- |
|||||||||||||
перболоид вращения, как частный случай поверхности, может быть полу- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
чен вращением гиперболы вокруг ее мнимой оси или вращением прямой |
|||||||||||||
линии вокруг скрещивающей с ней оси). |
|
Б |
|
|
|||||||||
|
На рис. 11.15 приведен |
чертеж фрагмента |
поверхности |
||||||||||
|
линейчатой |
||||||||||||
с тремя направляющими n(n',n"), k(k',k") |
m(m',m"). Там же показаны по- |
||||||||||||
строения для определения положения недостающей проекции A' точки A(A"). |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
Воспользоваться для этого одной из обра- |
||||
|
|
|
|
|
|
l" |
|
|
зующихив данном примере не представля- |
||||
|
|
|
|
|
|
|
|
|
ется в зможным, так как неизвестно поло- |
||||
|
n" |
|
|
|
|
m" |
|
жениерее фронтальной проекции, |
проходя- |
||||
|
|
A" |
|
|
|
|
|
|
щей через заданную проекцию A" точки. |
||||
|
|
|
k" |
|
|
Зато благодаря |
проецирующему |
положе- |
|||||
αV |
|
|
|
|
|
т |
нию направляющей k(k',k") можно задать |
||||||
|
|
|
|
|
горизонтальные проекции любых образу- |
||||||||
|
|
|
и |
|
|
||||||||
|
|
|
|
|
|
ющих. Воспользуемся этим и построим го- |
|||||||
|
|
|
|
|
|
ризонтальную проекцию каркаса поверхно- |
|||||||
|
|
|
|
|
l' |
|
|
|
|||||
|
|
|
з |
|
m' |
|
сти из семейства образующих l(l'). Затем по |
||||||
|
|
A' |
|
|
|
|
|
точкам их пересечения с горизонтальными |
|||||
|
|
|
|
|
|
|
|
проекциями n' и m' направляющих постро- |
|||||
|
n' |
о |
|
|
|
|
|
||||||
|
|
k' |
|
|
|
|
им фронтальные проекции l" |
этих образу- |
|||||
|
п |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ющих. Далее выполним сечение поверхно- |
||||||
е |
Рис. 11.15 |
|
|
|
|
||||||||
|
|
|
|
сти фронтально-проецирующей плоскостью |
|||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
αV. По фронтальным проекциям точек ее пересечения с образующими по- |
|||||||||||||
строим горизонтальную проекцию кривой линии этого сечения и на ней по- |
|||||||||||||
средством линии связи определим положение искомой проекции A' точки. |
|||||||||||||
Р |
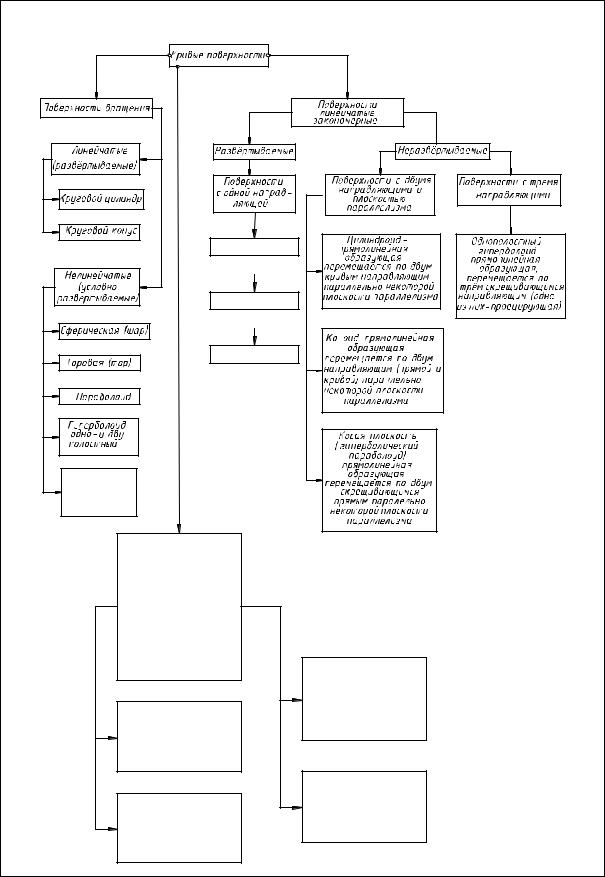
Структуризация материала одиннадцатой лекции в рассмотренном объ- |
||||||||||||
|
|||||||||||||
еме схематически представлена на рис. 11.16 (лист 1). На последующих |
|||||||||||||
листах 2 и 3 приведены иллюстрации к этой схеме, компактно приведены |
|||||||||||||
иллюстрации к этой схеме для визуального закрепления основной части |
|||||||||||||
изученного материала при повторении (рис. 11.17 и 11.18). |
|
|
|||||||||||
194 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кривые поверхности |
|
|
|
|
|
|||||
|
M-2-3 |
|
|
|
|
|
|
|
M-2-4 |
|
|
|
|
|
|
|
|
|
|
|
|
Цилиндрические |
|
|
|
|
|
|
|
У |
|||
|
|
|
|
|
|
Рис. 11. .1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||||
|
|
|
|
|
|
Ðèñ.11.17, |
à |
|
|
|
|
|
|
|||
|
|
|
|
|
|
Конические |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Рис. 11.1.2 |
|
|
Ðèñ.11.17, ã |
|
|
Рис. .2.7 |
|
|||
|
|
|
|
|
|
Ðèñ.11.17, |
á |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðèñ.11.18 |
|
|
|
|
|
|
|
|
|
|
|
Í |
|
|
|
Н |
|
|
|
|
|
|
|
|
Торсовые |
|
|
|
|
|
|
||||
|
|
|
|
|
|
Рис. 11. .3 |
|
|
|
|
Б |
|
|
|||
|
|
|
|
|
|
Ðèñ.11.17, |
â |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ðèñ.11.17, |
|
ä |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
||
|
Эллипсоид - |
|
|
|
|
|
|
и |
|
|
|
|
|
|||
|
Эллипсоид – |
|
|
|
|
|
|
|
|
|
|
|
||||
|
сжатый и |
|
|
|
|
|
|
|
|
|
|
|
||||
|
сжатый и |
|
|
|
|
|
|
|
|
|
|
|
||||
|
вытянутый |
|
|
|
р |
|
|
|
|
|
|
|||||
|
втянутый |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
В начертательной гео- |
Ðèñ.11.17, |
å |
|
|
|
||||||||
|
|
|
метрии принят кинема- |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
тическ я способ обра- |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
я поверхнос |
о |
|
|
|
|
|
|
|
|||||
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
когда поверхность |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
представляет собой |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
ческое место |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
(след) обра |
|
ли- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ний, ующихдвижущихся в |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
пр странстве по на- |
|
|
|
Линейчатые |
|
|
|
|
|
||||
|
|
|
правляющим линиям. |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
поверхности: |
|
|
|
|
|
|||||
|
|
|
зован |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
образующая - прямая |
|
|
|
|||
|
|
|
Закономерные поверх- |
|
|
|
линия (цилиндрическая, |
|
|
|
||||||
|
|
|
|
|
|
коническая, торсовая и |
|
|
|
|||||||
|
|
геометр |
образующие |
|
|
|
|
|
|
|||||||
|
п |
ности: |
|
|
|
|
т.д.) |
|
|
|
|
|
||||
|
еремещаются в прос- |
|
|
|
|
|
|
|
|
|
||||||
|
транстве по некоторо- |
|
|
|
|
|
|
|
|
|
|
|||||
|
му закону |
|
|
|
|
|
|
|
|
|
|
|
||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Нелинейчатые |
|
|
|
|
|
|||
|
Незакономерные |
|
|
|
поверхности: |
|
|
|
|
|
||||||
|
|
|
|
образующая - кривая |
|
|
|
|||||||||
Р |
|
|
|
|
|
|
|
|
||||||||
|
|
поверхности: |
|
|
|
|
линия (сферическая, |
|
|
|
||||||
|
|
образующие перемеща- |
|
|
|
|
|
|
||||||||
|
|
|
|
|
эллипсоидная и т.д.) |
|
|
|
||||||||
|
|
ются в пространстве |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
произвольно |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Рис. 11.16 |
|
|
|
|
|
Ëèñò 1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
195 |
|
|
11.Поверхности1.1. Поверхностис однойс однойнаправляющейнаправляющей(закономерные,закономерныеразвертываемые), развёртываемые) |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Цилиндрические |
|
|
|
|
|
|
|
|
|
|
Конические |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
t" |
|
|
|
|
|
|
|
|
|
|
|
|
фронтальный |
|
|
|
|
|
|
|
|
S" |
|
||||||
|
|
|
S" |
|
|
|
|
|
|
|
|
|
|
|
V1" |
|
след пов-сти |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
направление |
|
|
|
|
(A") |
|
|
|
|
|
|
|
|
|
t" |
|
V2" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
образующих |
|
|
|
|
|
|
|
|
|
|
|
S" |
|
|
|
2" |
|
V3" |
|
|
|
|
|
t" |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3" |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n" |
|
|
|
|
|
|
(B") |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
n" |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
направляющая |
|
|
|
|
|
|
|
образующая |
|
|
|
|
|
|
|
|
|
n' |
|
|
|
n(n', n") |
|
|
|
|
|
B"-? |
|
|||||||
|
кривая n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
n' |
A' |
|
|
|
|
|
|
|
|
|
S' |
1' |
|
|
|
|
|
|
|
|
B' |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
S' |
|
|
|
|
|
|
|
|
t' |
|
|
|
|
|
|
t' |
|
|
|
|
|
|
|
|
|
|
|
t' |
|
|
|
|
S' |
|
|
|
|
A'-? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|
|
|
|
|
|
|
á |
|
|
|
|
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
11.1.1 |
|
|
|
|
|
|
|
|
|
|
Рис. 11.1.2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Торс - поверхность с ребром возврата |
|
|
Т |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
семейство |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
касательных |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d - ребро возврата |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
(пространственная кривая) |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45 6 7 |
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.1.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
â |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
11.1.2. Поверхности с двумя нап авляющими и плоскостью параллелизма |
|
|
|
||||||||||||||||||||||||||||||||
|
|
Поверхности с двумя направляющими и плоскостью параллелизма |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
(закономерные, неразвёртываемые) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
(закономерные, развертываемые) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Цилиндроид (ф(m,n, ( V)) |
|
|
|
К н ид (ф(m,n, |
( |
V)) |
|
|
|
Косая плоскость - |
|
|
|
|
|||||||||||||||||||||
направ- |
t |
" |
|
t " |
m" |
|
|
") |
о |
|
плоскость |
|
|
|
|
|
гиперболический |
|
|
|
|
|
|
||||||||||||||
ляющие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параболоид |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
параллелизма |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
V( л"n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1" |
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(ф(m,n, |
( |
V)) |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
секущая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
плоскость |
|
|
|
|
|
t " |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
l" (построена) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
" |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
направ- |
|
|
|
|
|
|
|
дан |
|
|
t " |
m" 1" n" |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
n" |
|
|
|
|
ляющие |
|
|
|
|
|
|
|
l"( |
n" |
|
|
|
|
|
|
t |
" |
|
|
|
||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
2" |
|
|
|
t |
" |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
m" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
о |
|
плоскость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3" |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
n1' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на) |
|
||||||||||||
|
|
|
пареллелизма |
|
|
|
|
|
|
|
|
l' |
t |
|
' |
|
|
|
|
|
|
|
да |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3' |
l |
|
|
|
|
|
|
|||||
|
п |
1' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
' |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
построена |
|
2' |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m' |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
n' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
' |
|
|||||||||||
елиния |
|
|
2' |
|
|
|
|
|
|
V |
|
m' |
|
|
|
|
|
|
|
t ' |
|
|
|
1' |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
n' |
|
|
|
|
|
|
|
|
|
семейство |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n' |
t ' |
|
|
|||||||||||
|
семейство |
|
|
t |
' |
|
|
|
семейство |
|
|
|
|
|
|
|
|
|
|
|
образующих |
|
|||||||||||||||
Р |
пересечения |
|
образующих |
t |
' |
|
|
|
|
|
|
|
|
|
l'-? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
образующих |
|
|
|
|
|
|
|
|
|
l"-? |
|
|
|
|
|
|
|
||||||||||||||
(л'п'-построена) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Рис. 11.1.4 |
|
|
|
|
|
|
|
|
|
|
Рис. 11.1.5 |
|
|
|
|
|
|
Рис. |
11.1.6 |
|
|
|
|
|
|
||||||||||
|
|
|
|
ã |
|
|
|
|
|
|
|
|
|
|
|
|
ä |
|
|
|
|
|
|
|
|
|
|
å |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ëèñò 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
196 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3. ПоверхностиПоверхностис тремяс тремяскрещивающимисяскрещивающимисянаправляющиминаправляющими(однополостный– гиперболоид) - (ф (a, однополостныйb, c)) гиперболоид (Ф(a, b, c))
|
|
|
|
|
а" |
|
b" c" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t " |
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
семейство |
Т |
|
|
|
|
|
|
|
|
|
|
|
образующих |
|
|
|
|
|
|
|
а' |
|
|
|
t " |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
направляющие c' |
t " |
Б |
|
|
||||||
|
|
b' |
|
|
||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
Ëèñò 3
Рис. 11.18
197
Лекция 12
ПЕРЕСЕЧЕНИЕ ЛИНИИ С ПОВЕРХНОСТЬЮ. КАСАТЕЛЬНЫЕ ПЛОСКОСТИ И НОРМАЛЬ К ПОВЕРХНОСТИ
ПЕРЕСЕЧЕНИЕ ЛИНИИ С ПОВЕРХНОСТЬЮ
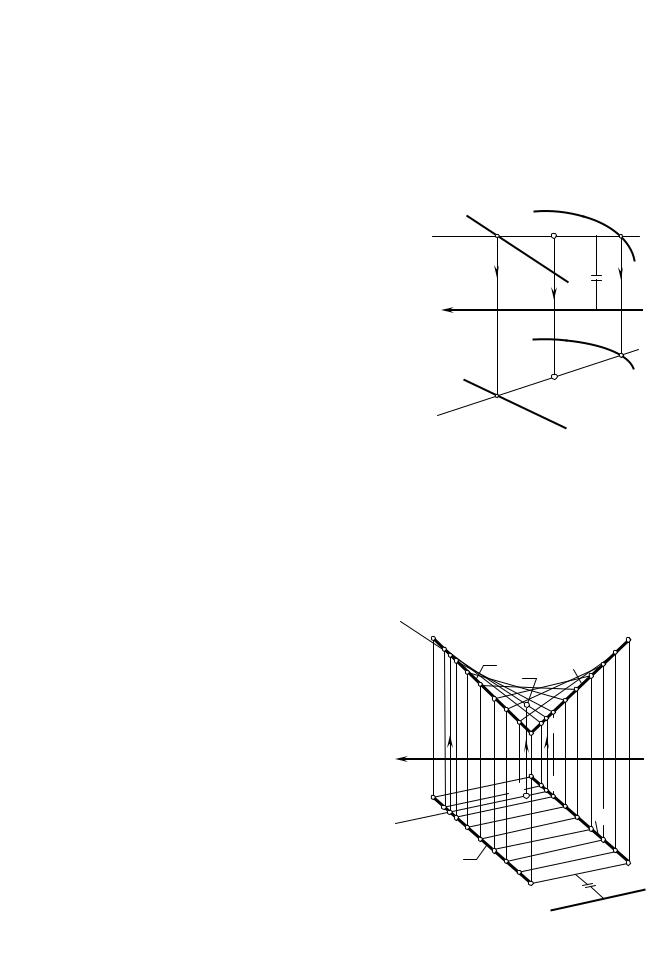
|
|
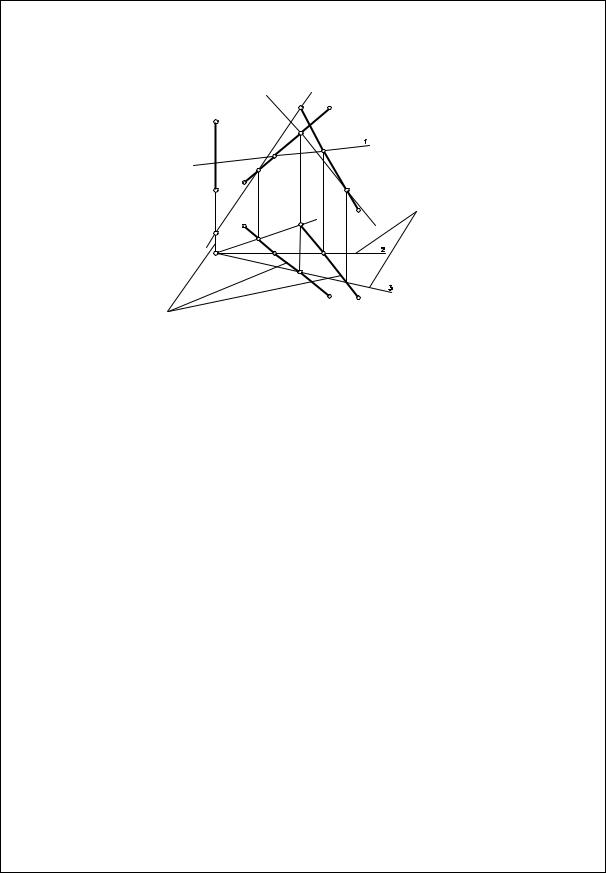
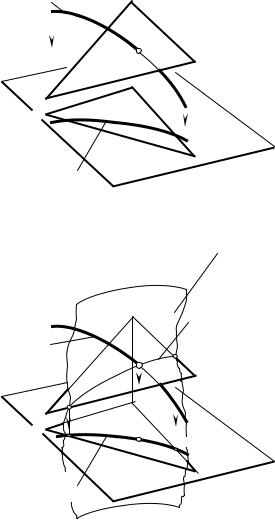
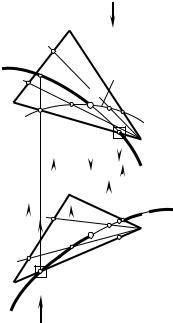
В общем случае для графического определения положения точек пе- |
||||||||||||||||||||||
ресечения линии с поверхностью необходимо выполнить ряд геометриче- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
ских построений в следующей последовательности: заключить линию во |
||||||||||||||||||||||||
вспомогательную поверхность; определить линию пересечения этой по- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
верхности с заданной поверхностью; отметить точки пересечения постро- |
||||||||||||||||||||||||
енной линии с заданной. |
|
|
|
|
|
|
||||||||||||||||||
|
|
Этот алгоритм является универсальным, пригодным для решения лю- |
||||||||||||||||||||||
бых задач. Ранее (лекция 4, рис. 4.5 и 4.6) он применялся для построения |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
C |
|
|
|
|
Б |
|
проекций точки пересечения прямой с плоскостью, где в качестве вспомо- |
||||||||||||||||||||||||
|
Кривая |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
гательной секущей поверхности ис- |
||||||||
|
линия |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
пользовалась плоскостьНи строилась |
||||||
|
|
A' |
|
|
|
k' α' |
|
|
|
|
|
|
|
|
|
|
даннойпрямой. |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
прямая линии пересечения ее с задан- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C' |
|
|
ной плоскостью, а искомая проекция |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
B' |
|
|
|
|
|
|
|
пересечения определялась как |
|||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
место пересечения этой линии с за- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
На р с. 12.1–12.3 проиллюстри- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Проекция |
|
|
|
|
H |
|
|
|
|
|
|
|
|
ван тот же алгоритм применительно |
|||||||||
|
|
|
|
|
|
|
|
|
т |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к пост оению точки пересечения кри- |
||||
|
кривой линии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Рис. 12.1 |
|
|
|
|
|
|
в й линии k с плоскостью α(∆ABC). |
||||||||
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
и |
|
В качестве секущей поверхности в дан- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Вспомогательная секущая ц л н- |
|
ном случае следует использовать про- |
|||||||||||||||||||||
|
|
|
|
|
дрическая поверхность |
|
|
ецирующую цилиндрическую поверх- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
β H |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность, в частности, горизонтально-про- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
Линия |
|
ецирующую β(βH) H, в которуюдолж- |
|||||
|
|
|
|
|
|
|
з |
|
на быть заключена кривая k(k",k'). Для |
|||||||||||||||
|
Кривая |
|
|
|
|
|
пересечения |
|||||||||||||||||
|
линия |
|
|
|
|
|
k |
O |
2 |
|
|
|
этого на чертеже (рис. 13.3) обознача- |
|||||||||||
е |
|
о |
|
|
|
|
|
|
C |
|
|
ем горизонтальный след этой поверх- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
α |
|
|
|
|
|
|
|
|
|
ности βH. |
Горизонтальная проекция |
|||||
|
|
A |
|
|
B' |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
линии ее пересечения с заданной плос- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
A' |
|
|
1' |
|
k'≡βH |
|
|
O' |
2' |
|
|
|
костью α(∆ABC) совпадает с ним, рас- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C' |
|
|
полагаясь |
между точками 1'-2'. Для |
||||
Совпадающие |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
H |
|
|
|
|
|
|
|
|
|
построения ее фронтальной проекции |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
со следом βH |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
воспользуемся произвольными вспо- |
||||
|
плоскости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
проекции k' |
|
|
|
1. k β( H) |
|
|
могательными прямыми линиями, при- |
||||||||||||||||
кривой линии |
|
|
|
|
||||||||||||||||||||
и 1' – 2' линии |
|
2. α(∆ABC) ∩ β →1 – 2 |
|
надлежащими плоскости. Вначале за- |
||||||||||||||||||||
|
пересечения |
|
|
3. k ∩ 1 – 2 → O |
|
|
даем их горизонтальные проекции, на- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
Рис. 12.2 |
|
|
|
|
|
|
пример, через вершину C. Затем по |
|||||||
198 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точкам их пересечения со стороной AB нахо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|||||||||||
дим фронтальные проекции вспомогательных |
|
|
|
|
|
|
|
|
B" |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1" – 2" |
|||||||||||||
прямых и определяем на них фронтальные про- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
фронтальная |
|||||||||||||
екции точек пересечения с ними заданной кри- |
k" |
|
3" |
|
|
|
|
α" |
|
проекция линии |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
пересечения |
|||||||||||||||
вой. Проводим через найденные точки плав- |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
O" (построена) |
||||||||||||||||
ную кривую линию, являющуюся, таким обра- |
A" |
|
|
|
1" |
|
|
|
|
|
|
|
|
|
2" |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
зом, фронтальной проекцией линии пересе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C" |
||||||||
чения, и отмечаем на ней место пересечения |
|
|
|
|
|
|
|
|
|
|
4"≡5" |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
с фронтальной проекцией заданной кривой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
k(k",k') – точку O". |
Это и будет фронтальная |
|
|
|
|
|
|
|
B' |
|
|
|
|
5' |
|
|
|
βH |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
проекция искомой точки пересечения заданной |
|
|
|
|
|
|
|
|
|
|
α' |
|
|
|
|
2' |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
кривой k(k",k') с плоскостью α(∆ABC). Затем, |
|
|
|
|
|
|
|
|
|
|
O' |
|
|
|
|
|
|
C' |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|||||||||
воспользовавшись линией связи, находим гори- |
|
|
|
|
|
|
|
|
|
|
|
|
4' |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1' – 2' |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
зонтальнуюпроекциюO' точкипересечения. |
|
A' |
|
|
|
|
1'≡3' |
горизонтальнаяТ |
||||||||||||||||||
|
|
|
||||||||||||||||||||||||
|
Этот алгоритм применен и для построения |
k' |
|
|
|
|
|
|
|
|
|
проекция линии |
||||||||||||||
точек пересечения прямой линии с поверхно- |
|
|
|
|
|
V |
|
|
|
|
пересечения |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
стями геометрических тел – призмы, пирами- |
|
|
|
|
|
Н |
|
|||||||||||||||||||
|
|
|
1. k |
β(βH) |
|
|||||||||||||||||||||
ды и самопересекающегося тора (рис. 12.8, а, |
|
|
|
2. (1–2) → β ∩ α(∆ABC) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3. O → (1 – 2) ∩ k |
|
|||||||||||||
б, в). Поскольку поверхности этих тел явля- |
Б |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ются замкнутыми, то необходимо |
|
по |
|
|
|
|
|
Рис. 12.3 |
|
|||||||||||||||||
две точки пересечения на каждой из н х. |
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
При пересечении с призмой ( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
с. 12.8, а) |
в качестве секущей плос- |
||||||||||||||||||||||||
кости для заключения в нее |
|
п ямой m(m",m') использовалась |
||||||||||||||||||||||||
|
|
|
|
|
|
найти |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
фронтально-проецирующая пл ск сть αV. При пересечении с пирамидой |
||||||||||||||||||||||||||
(рис. 12.8, б) в качестве секущей рпл скости для заключения в нее заданной |
||||||||||||||||||||||||||
прямой n(n",n') использовалась г ризонтально-проецирующая плоскость |
||||||||||||||||||||||||||
αH. При пересечен |
с самопересекающимсязаданной |
тором (рис. 12.8, в) в качестве |
||||||||||||||||||||||||
секущей плоскости для заключения в нее заданной прямой l(l",l') исполь- |
||||||||||||||||||||||||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зовалась фронтальная плоскость βH. Далее все действия аналогичны рас- |
||||||||||||||||||||||||||
смотренным. В каждом случае вначале строилась линия пересечения по- |
||||||||||||||||||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
верхности пл ск стью, исходя из ее проецирующего положения, опреде- |
||||||||||||||||||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
а при окончательном |
||||||||||||||
лялись на ней т чки пересечения с заданной прямой, |
||||||||||||||||||||||||||
оформлении – видимость на чертеже. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В кач стве секущей плоскости при определении точек пересечения пря- |
|||||||||||||||||||||||||
мой с |
рхностью могут использоваться также плоскости общего положе- |
|||||||||||||||||||||||||
|
пов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния, п р с кающие поверхность вдоль ее образующих (рис. 12.8, г, д). Так, |
||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для построения точек пересечения прямой a(a",a') общего положения с поверхностью прямого кругового конуса (рис. 12.8, г) показано использование плоскости общего положения α, проходящей через вершину конуса и заданную прямую. Плоскость задана двумя пересекающимися прямыми. Одна из них – это заданная прямая a(a",a'), вторая – пересекающаяся с ней произвольная прямая b(b",b'), проходящая через вершину конуса. Для построения проекций образующих, вдоль которых плоскость пересекает поверхность конуса, найден ее горизонтальный след, затем проекции C' и D' точек его
199