3. Гидравлические усилители с силовой ос.
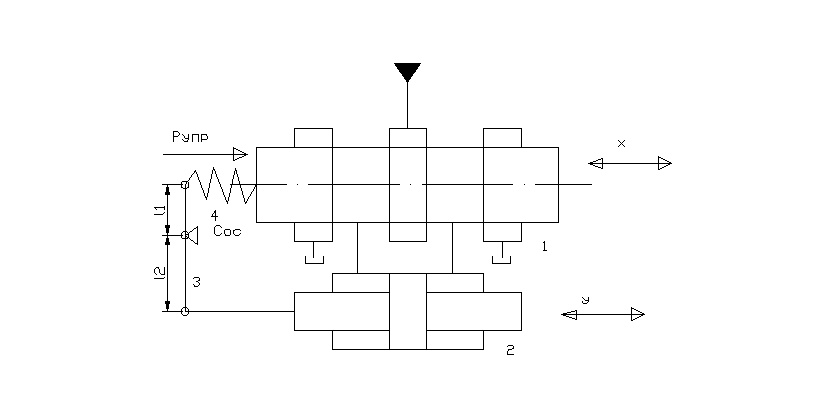
В ГУ с силовой ОС по положению входным параметром является усилие, которое воспринимается управляющим элементом распределителя 1.
ГУ включает в себя распределитель 1, ГЦ 2, рычаг 3 и пружину ОС 4.
Принцип действия: при воздействии на золотник дросселирующего распределителя 1 управляющего сигнала Рупрзолотник смещается из нейтрального положения на величину Х. Это приводит к движению штока ГЦ который через рычаг ОС и пружину ОС создает, Рособратную по знаку управляющему воздействию. При равенстве этих сил шток устанавливается на величину пропорциональную управляющему воздействию.
Лианеризованная модель ненагруженного
ГУ с силовой ОС описывается системой
уравнений:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Достоинства: в качестве управляющего сигнала может быть использовано управляющее усилие без каких либо дополнительных преобразований. Такой вид сигнала используют все без исключения электромеханические преобразователи. Поэтому ГУ с силовой обратной связью широко применяются в конструкциях ЭГУ с гидрораспределителем типа сопло-заслонка или с гидрораспределителем со струйной трубкой.
Билет 15
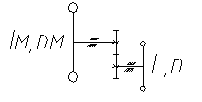
Оптимизация передаточного числа редуктора
В соответствии с данной схемой мотор
разгоняет инерционную нагрузку,
присоединенную к нему при помощи
редуктора с передаточным отношением
 .
Данную систему можно рассматривать как
двухмассовую т.к. моменты инерции вращ.
частей приводятся к моменту инерции
вала гидромотора нагрузки.
.
Данную систему можно рассматривать как
двухмассовую т.к. моменты инерции вращ.
частей приводятся к моменту инерции
вала гидромотора нагрузки.![]() -
углы поворота нагрузки и мотора.
-
углы поворота нагрузки и мотора.![]() Пренебрегая потерями баланс моментов
запишется в виде:
Пренебрегая потерями баланс моментов
запишется в виде:![]()
 ;
;
![]() Исследуем данное выражение на экстремум:
Исследуем данное выражение на экстремум: ;
;
 ;
;![]() - оптимальное передаточное число
редуктора.
- оптимальное передаточное число
редуктора.
![]() -
максимальное ускорение нагрузки или
можно записать в виде
-
максимальное ускорение нагрузки или
можно записать в виде![]() ,
где
,
где![]() -
добротность(приемистость) ГД. Параметр
П у ГД на порядок выше, чем у электродвигателей.
-
добротность(приемистость) ГД. Параметр
П у ГД на порядок выше, чем у электродвигателей.
2.Объемное регулирование скорости выходного звена гидропередачи. Характеристики работы гидропередачи при объемном регулировании
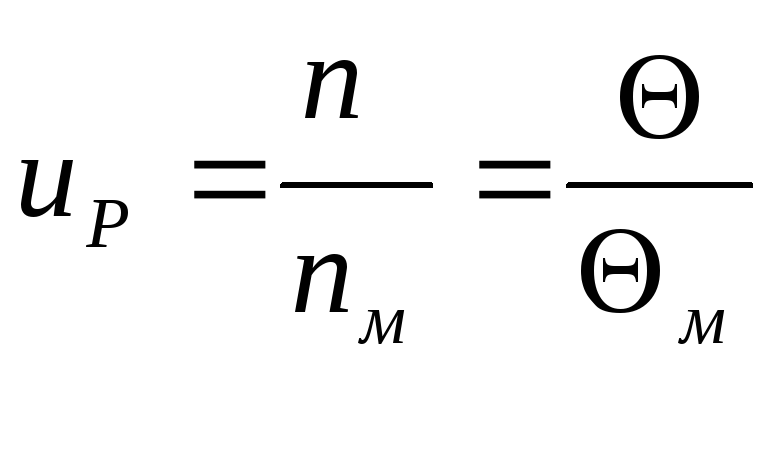
Гидроприводом с объемным регулированием наз. привод в котором изменение скорости движения выходного звена гидродвигателя осуществляется регулируемым гидромотором, регулируемым насосом или обеими регулируемыми гидромашинами.
Теоретическая (расчетная) частота вращ. вала г/мотора в таких приводах может быть определена из условия равенства подачи насоса и расхода раб. жидкости г/мотора:
![]() или
или![]() , откуда
, откуда![]() .
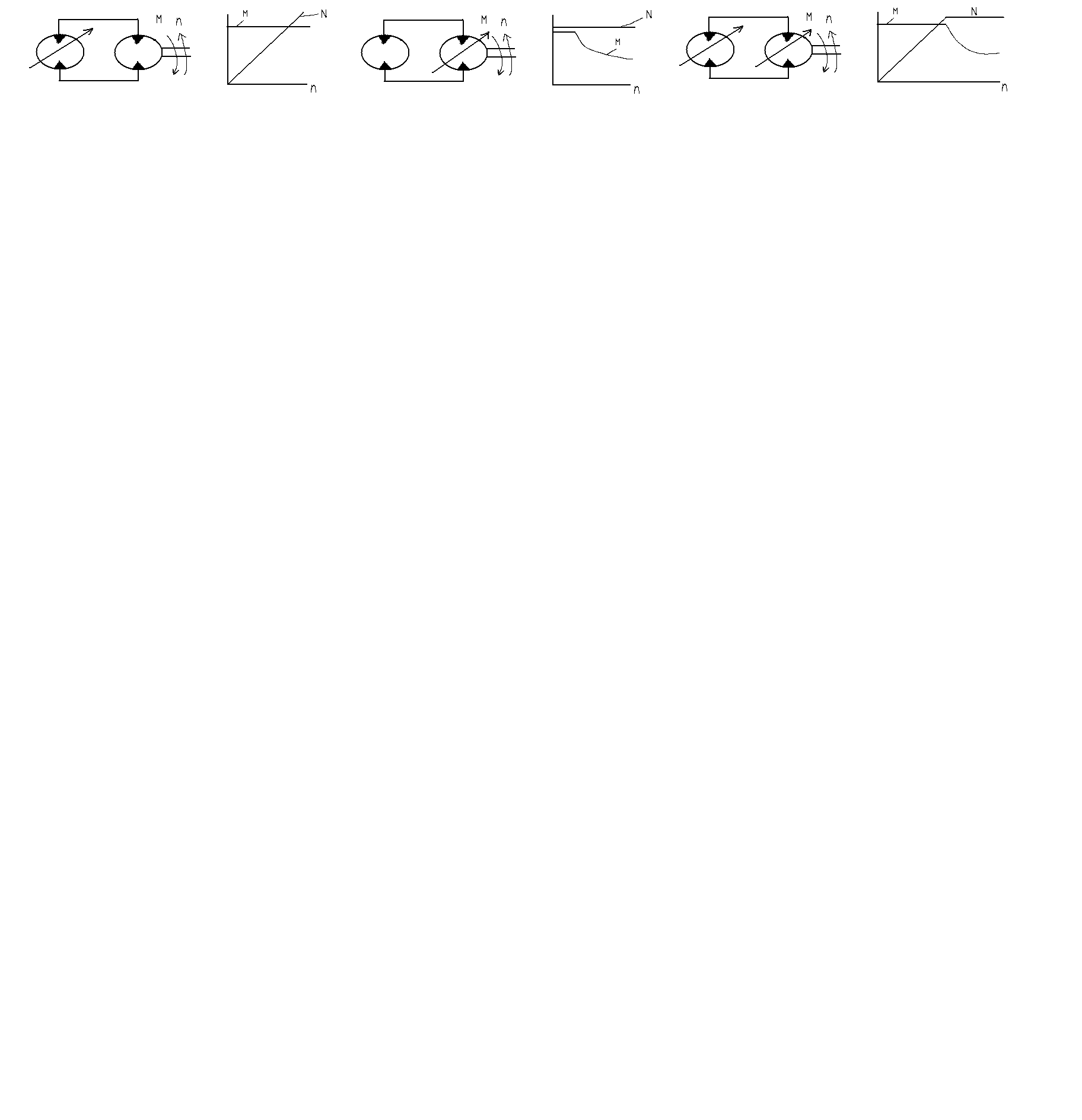
ГП с регулируемым насосом и нерегулируемым
мотором применяется в ГП поступательного,
поворотного и вращательного движений.
Принцип работы: насос нагнетает раб.
жидкость по напорной магистрали в
г/мотор, вал которого под действием
крутящего момента вращается в определенном
направлении. Из г/мотора раб. жидкость
поступает в насос. Давление в системе
зависит от нагрузки на г/моторе:
.
ГП с регулируемым насосом и нерегулируемым
мотором применяется в ГП поступательного,
поворотного и вращательного движений.
Принцип работы: насос нагнетает раб.
жидкость по напорной магистрали в
г/мотор, вал которого под действием
крутящего момента вращается в определенном
направлении. Из г/мотора раб. жидкость
поступает в насос. Давление в системе
зависит от нагрузки на г/моторе:![]() , где
, где![]() -потери
давления в магистрали. Частоту вращения
г/мотора регулируют, изменяя рабочий
объем насоса, а направление вращения
вала г/мотора изменяют благодаря
реверсированию потока рабочей жидкости,
создаваемого насосом. При этом вначале
подачу насоса уменьшают до нуля, а затем
увеличивают, но в противоположном
направлении; в результате этого сливная
гидролиния становится напорной, а
напорная – сливной. На рис.1 показаны
хар-ки такого гидропривода с учетом :
-потери
давления в магистрали. Частоту вращения
г/мотора регулируют, изменяя рабочий
объем насоса, а направление вращения
вала г/мотора изменяют благодаря
реверсированию потока рабочей жидкости,
создаваемого насосом. При этом вначале
подачу насоса уменьшают до нуля, а затем
увеличивают, но в противоположном
направлении; в результате этого сливная
гидролиния становится напорной, а
напорная – сливной. На рис.1 показаны
хар-ки такого гидропривода с учетом :
![]() ;
;![]() ;
;![]() .
Как видно из формул, частота вращения
г/мотора и его мощность изменяются в
таком приводе прямопропорционально
рабочему объему насоса, а крутящий
момент является постоянным без учета
потерь. ГП с регулируемым г/мотором и
нерегулируемым насосом (рис.2) применяется
зничительно реже. Его хар-ки приведены
с учетом условий :
.
Как видно из формул, частота вращения
г/мотора и его мощность изменяются в
таком приводе прямопропорционально
рабочему объему насоса, а крутящий
момент является постоянным без учета
потерь. ГП с регулируемым г/мотором и
нерегулируемым насосом (рис.2) применяется
зничительно реже. Его хар-ки приведены
с учетом условий :![]()
![]()
![]()
![]()
![]()
![]() Частота
вращения г/мотора изменяется в таком
ГП обратнопропорционально его рабочему
объему. Теоретическая мощность без
гидравлических потерь постоянна.
Недостатками такого привода явл.
сложность управления г/мотором при его
значительном уделении от оператора и
ограничение минимального рабочего
объема, когда момент, развиваемый
г/мотором, равен или меньше момента
внутреннего трения (происходит
саматорможение). ГП с регулируемым
г/мотором и регулируемым насосом (рис.3)
имеет более широкий диапазон регулирования
частоты и момента, развиваемого г/мотором.
Он состоит из двух диапазонов регулирования:
- регулирование скорости изменением
раб. объема насоса при
Частота
вращения г/мотора изменяется в таком
ГП обратнопропорционально его рабочему
объему. Теоретическая мощность без
гидравлических потерь постоянна.
Недостатками такого привода явл.
сложность управления г/мотором при его
значительном уделении от оператора и
ограничение минимального рабочего
объема, когда момент, развиваемый
г/мотором, равен или меньше момента
внутреннего трения (происходит
саматорможение). ГП с регулируемым
г/мотором и регулируемым насосом (рис.3)
имеет более широкий диапазон регулирования
частоты и момента, развиваемого г/мотором.
Он состоит из двух диапазонов регулирования:
- регулирование скорости изменением
раб. объема насоса при![]() - регулирование скорости изменением
раб. объема г/мотора при
- регулирование скорости изменением
раб. объема г/мотора при![]() Из приведенных хар-к следует
Из приведенных хар-к следует![]() ,
что позволяет использовать этот привод
в транспортных средствах, где необходимо
осуществлять трогание машины с моментом
,
что позволяет использовать этот привод
в транспортных средствах, где необходимо
осуществлять трогание машины с моментом![]() при
очень малой скорости. По мере разгона
момент должен уменьшаться, а частота
вращения увеличиваться. Это достигается
уменьшением (регулированием) раб. объема
г/мотора. Применение регулируемого
насоса увеличивает диапазон регулирования
привода.
при
очень малой скорости. По мере разгона
момент должен уменьшаться, а частота
вращения увеличиваться. Это достигается
уменьшением (регулированием) раб. объема
г/мотора. Применение регулируемого
насоса увеличивает диапазон регулирования
привода.
Рис.1 Рис.2 Рис.3