

Билет 3
1.Выбор наименьшего размера регулируемых машин
П ри
проектировании гидроприводов с машинным
управлением может быть два подхода при
задании данных на проектирование.
ри
проектировании гидроприводов с машинным
управлением может быть два подхода при
задании данных на проектирование.
1 )
Задается определенное передаточное
отношение которое должен обеспечить
данный приводU=nM/nN
Воспользуемся выражениями для подачи
насоса и расхода гидромотора
)
Задается определенное передаточное
отношение которое должен обеспечить
данный приводU=nM/nN
Воспользуемся выражениями для подачи
насоса и расхода гидромотора
2)Задается определенное значение трансформации моментов

![]() КПД
мотора и насоса, которые определяют
любые потери кроме обьемных
КПД
мотора и насоса, которые определяют
любые потери кроме обьемных определяющее
мех. потери в магистрали.
определяющее
мех. потери в магистрали.

 При
выборе обьемных размеров гидромашин
записывают выражение мощности приводного
двигателя гидромашины Сп-коэф
быстроходности или коэф скорости.Dн-хар-ный размер
При
выборе обьемных размеров гидромашин
записывают выражение мощности приводного
двигателя гидромашины Сп-коэф
быстроходности или коэф скорости.Dн-хар-ный размер
2. Определение мощности и крут. момента на валу акс. поршневой гидромашины.
=QM/W- угловая скоростьW=q/(2π) - характерный (уд) объем

3. Основные приборы УСЭППА
Р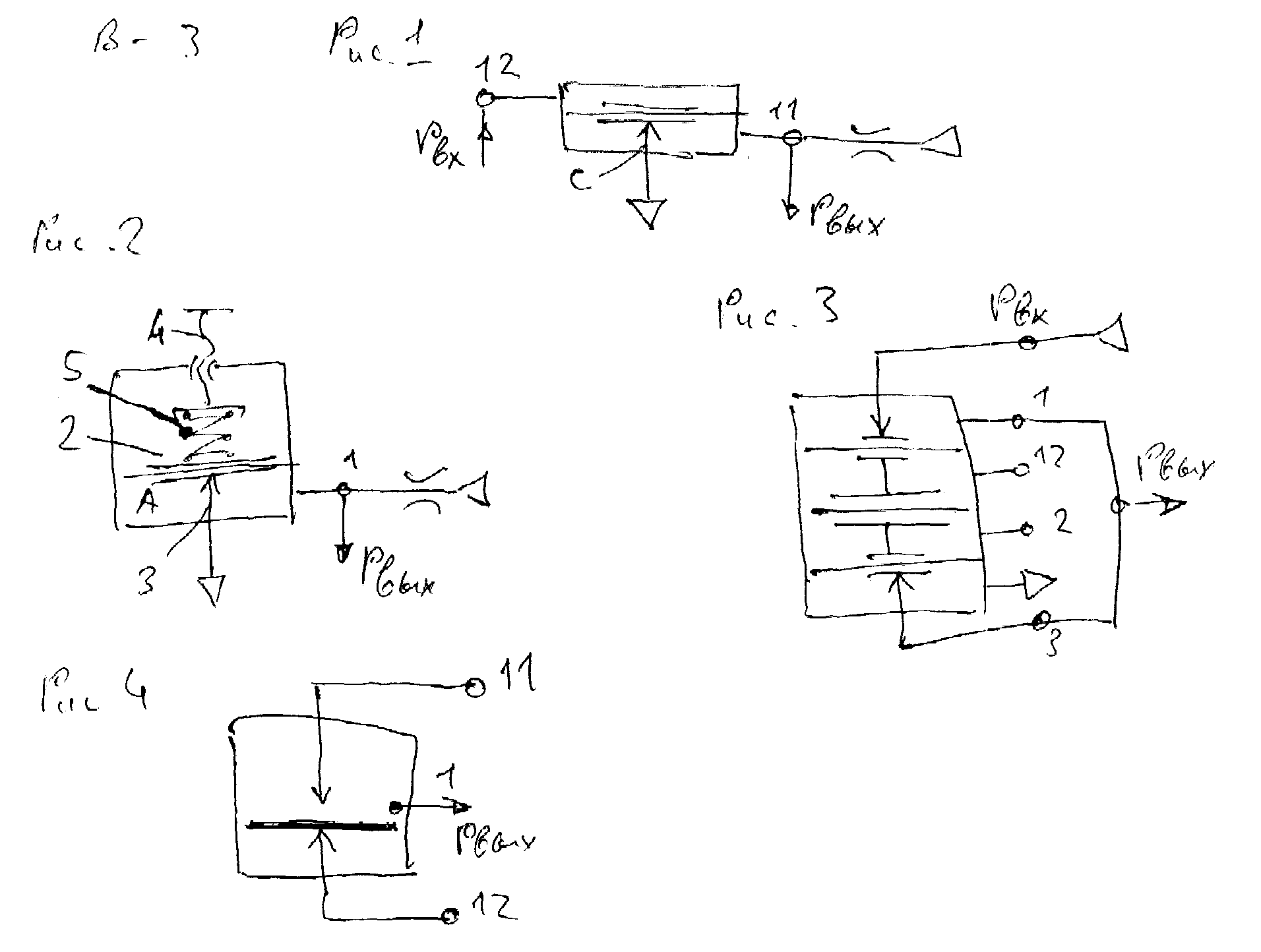 ис.1
УСЭППА представляют собой реализацию
элементного принципа построения приборов
в пневмоавтоматике, и состоит из набора
универсальных элементов дискретного
и непрерывного действия, каждый из
которых выполняет простейшую операцию.
Питание элементов осуществляется
воздухом очищенным от пыли,влаги и
масла. Эл-ты и приборы УСЭППА делят на
три группы - аналоговые, дискретные и
1)Аналоговые: Элементы этой группы
работают по принципу компенсации сил
и предназначены для построения аналоговых
и пневматических устройств А налоговые
группы включают операционные усилители,
пневмоемкости,пневмосопротивления,
повторители. Рис1- повторитель П-1
предназначен для выдачи маломощного
пневмо сигнала равного по давлению
входному. Он состоит из двух секций
разделенных гибкой мембраной М которая
служит заслонкой выпускного сопла С,
имеющего выход в Атмосферу. Питание
осущ. сжатым воздуха через постоянный
дроссель через штуцер11,который
конструктивно в повториель не входит.на
штуцер 12 подается входной сигнал. При
изм. давления на входе равновесие
мембраны нарушается, она устанавливается
в новое положение равновесия. При этом
зазор между мембраной и соплом становится
больше или меньше предыдущего в зав-ти
от направления изменения входного
давления. Класс точности – 0.25. Давление
на выходе Рвых изм-ся пропорционально
давлению Рвх на входе. Рис.2 – задатчик
маломощный предназначен для создания
стабильного давления сжатого воздуха
подаваемого обычно в глухие камеры
элементов пневмоавтоматики и состоит
из двух секций отделенных друг от друга
гибкой мембраной 2,жесткий центр которой
служит заслонкой выпускного сопла
3,имеющего выход в атмосферу. Давление
питания подается на штуцер 1 через
постоянный дроссель в полость А.Установка
заданного давления производиться с
помощью настроечного винта 4,при вращении
которого изменяется сжатие пружины 5
.Мембрана следящей камеры устанавливается
в положение равновесия при выходном
давлении Рвых пропорциональным силе
сжатия пружины.Рабочий диапазон вых-го
сигнала – 0.02…0.1 Мпа. Нестабильность
настройки – 0.5% от максимального выходного
давления. 2)УСЭППА дискретного (релейного)
действия. Элементы дискретной техники
предназначены для построения логических
устройств. Выходное давление может
принимать значение 0 или
0.08..0.14Мпа,соответствующее логическим
переменным 0 и 1. Рис 3- реле универсальное
трехмембранное - предназначен для
выполнения элементарных логических и
счетных операций с дискретными сигналами.
Реле имеет две основные части-1) реагирующий
орган 2)два пневмоэлемента сопло-заслонка
. Реагирующий оран состоит из трех
плоских мембран связанных по оси жестким
центром. Для введения положительной
обратной связи нижнюю камеру соединяют
с атмосферой, а верхнюю с нижним соплом.
Командные сигналы подаются на штуцеры
12 и 2 .Один из сигналов поддерживается
постоянным давлением, другой может
принимать два дискретных значения 0 или
1.Выходной сигнал может принимать два
значения 0 и Рвх. Если давление в штуцере
2 больше давления в штуцере 12 верхнее
сопло закрыто,а выход реле через нижнюю
камеру сообщается с атмосферой. Т.к
давление в верхних и в нижних камерах
равны между собой то при увеличении
Р12 шток реле перейдет в нижнее положение
при Р12=Р2. Давление Рвых и в верхней
камере станет равными Рвх. Мембранный
блок при отсутствии обоих командных
сигналов находятся в неопред. полож.
отчего элемент носит название реле с
неопред. нулем. В нижней камере за счет
того что она сообщается с атмосферой
избыт. давл. всегда равно 0.следовательно
после перехода штока в нижнее полож. не
него будут действовать доп. пост. сила
направленная в низ и равная произведению
эффект. площади верхней мембраны на
давление питания. Т.о реализуется полож.
ОС. При уменьшении давления Р12 шток реле
перейдет в верхнее полож.. Вел. давл.
подпора выбир. в за-ти от условий работы.
Если под действием давления подпора
сопло должно быть закрыто, подпор устан.
величиной приблиз. равной 0.7 давления
питания, в противном случае достаточно
0.3 давления питания. Разница в величинах
подпоров обьясняется тем что благодаря
действию положительной обратной связи
силы действующие на шток сверху вниз
могут превосходить силы действующие в
обратном направл. Рис 4 –клапан К - или-
С Предназначен для выполнения лог.
операции или, кот. заключается в том
,что на выходе клапана должен появится
единичный сигнал, если этот сигнал подан
хотя бы на один из входов клапана. Клапан
состоит из двух секций между которыми
расположена незакрепленная в корпусе
плавающая мембрана перекрывающая одно
из сопел.В рез. чего на выход проходит
сигнал 1. Входные давления подаются
через штуцера 11 и12 в одно или другое
сопло. Если оба давления на входе равны
мембрана находится в неопределенном
полож. и на выход проходит любое из двух
давлений или оба сразу.
ис.1
УСЭППА представляют собой реализацию
элементного принципа построения приборов
в пневмоавтоматике, и состоит из набора
универсальных элементов дискретного
и непрерывного действия, каждый из
которых выполняет простейшую операцию.
Питание элементов осуществляется
воздухом очищенным от пыли,влаги и
масла. Эл-ты и приборы УСЭППА делят на
три группы - аналоговые, дискретные и
1)Аналоговые: Элементы этой группы
работают по принципу компенсации сил
и предназначены для построения аналоговых
и пневматических устройств А налоговые
группы включают операционные усилители,
пневмоемкости,пневмосопротивления,
повторители. Рис1- повторитель П-1
предназначен для выдачи маломощного
пневмо сигнала равного по давлению
входному. Он состоит из двух секций
разделенных гибкой мембраной М которая
служит заслонкой выпускного сопла С,
имеющего выход в Атмосферу. Питание
осущ. сжатым воздуха через постоянный
дроссель через штуцер11,который
конструктивно в повториель не входит.на
штуцер 12 подается входной сигнал. При
изм. давления на входе равновесие
мембраны нарушается, она устанавливается
в новое положение равновесия. При этом
зазор между мембраной и соплом становится
больше или меньше предыдущего в зав-ти
от направления изменения входного
давления. Класс точности – 0.25. Давление
на выходе Рвых изм-ся пропорционально
давлению Рвх на входе. Рис.2 – задатчик
маломощный предназначен для создания
стабильного давления сжатого воздуха
подаваемого обычно в глухие камеры
элементов пневмоавтоматики и состоит
из двух секций отделенных друг от друга
гибкой мембраной 2,жесткий центр которой
служит заслонкой выпускного сопла
3,имеющего выход в атмосферу. Давление
питания подается на штуцер 1 через
постоянный дроссель в полость А.Установка
заданного давления производиться с
помощью настроечного винта 4,при вращении
которого изменяется сжатие пружины 5
.Мембрана следящей камеры устанавливается
в положение равновесия при выходном
давлении Рвых пропорциональным силе
сжатия пружины.Рабочий диапазон вых-го
сигнала – 0.02…0.1 Мпа. Нестабильность
настройки – 0.5% от максимального выходного
давления. 2)УСЭППА дискретного (релейного)
действия. Элементы дискретной техники
предназначены для построения логических
устройств. Выходное давление может
принимать значение 0 или
0.08..0.14Мпа,соответствующее логическим
переменным 0 и 1. Рис 3- реле универсальное
трехмембранное - предназначен для
выполнения элементарных логических и
счетных операций с дискретными сигналами.
Реле имеет две основные части-1) реагирующий
орган 2)два пневмоэлемента сопло-заслонка
. Реагирующий оран состоит из трех
плоских мембран связанных по оси жестким
центром. Для введения положительной
обратной связи нижнюю камеру соединяют
с атмосферой, а верхнюю с нижним соплом.
Командные сигналы подаются на штуцеры
12 и 2 .Один из сигналов поддерживается
постоянным давлением, другой может
принимать два дискретных значения 0 или
1.Выходной сигнал может принимать два
значения 0 и Рвх. Если давление в штуцере
2 больше давления в штуцере 12 верхнее
сопло закрыто,а выход реле через нижнюю
камеру сообщается с атмосферой. Т.к
давление в верхних и в нижних камерах
равны между собой то при увеличении
Р12 шток реле перейдет в нижнее положение
при Р12=Р2. Давление Рвых и в верхней
камере станет равными Рвх. Мембранный
блок при отсутствии обоих командных
сигналов находятся в неопред. полож.
отчего элемент носит название реле с
неопред. нулем. В нижней камере за счет
того что она сообщается с атмосферой
избыт. давл. всегда равно 0.следовательно
после перехода штока в нижнее полож. не
него будут действовать доп. пост. сила
направленная в низ и равная произведению
эффект. площади верхней мембраны на
давление питания. Т.о реализуется полож.
ОС. При уменьшении давления Р12 шток реле
перейдет в верхнее полож.. Вел. давл.
подпора выбир. в за-ти от условий работы.
Если под действием давления подпора
сопло должно быть закрыто, подпор устан.
величиной приблиз. равной 0.7 давления
питания, в противном случае достаточно
0.3 давления питания. Разница в величинах
подпоров обьясняется тем что благодаря
действию положительной обратной связи
силы действующие на шток сверху вниз
могут превосходить силы действующие в
обратном направл. Рис 4 –клапан К - или-
С Предназначен для выполнения лог.
операции или, кот. заключается в том
,что на выходе клапана должен появится
единичный сигнал, если этот сигнал подан
хотя бы на один из входов клапана. Клапан
состоит из двух секций между которыми
расположена незакрепленная в корпусе
плавающая мембрана перекрывающая одно
из сопел.В рез. чего на выход проходит
сигнал 1. Входные давления подаются
через штуцера 11 и12 в одно или другое
сопло. Если оба давления на входе равны
мембрана находится в неопределенном
полож. и на выход проходит любое из двух
давлений или оба сразу.