

2. Неравномерность подачи аксиально-поршневых насосов и способы её выравнивания. Дезаксиал аксиально-поршневых насосов.
Подача р/ж аксиальным насосом как и
радиальным имеет пульсирующий характер
она слагается из подачи отдельных
поршней совершающих рабочий цикл в
текущий момент времени![]() ,гдеn=
,гдеn=![]() - число цилиндров соединенных в данный
момент с полостью нагнетания. Мгновенная
подача одним поршнем насоса с наклонным
блоком приближенно равняется:
- число цилиндров соединенных в данный
момент с полостью нагнетания. Мгновенная
подача одним поршнем насоса с наклонным
блоком приближенно равняется:![]() ;f=
;f=![]() ;
;![]() текущ. значение относительной скорости
поршня в цилиндре;-угловая
скорость вала. Приведенное выражение
справедливо для насоса с синхронным(
двойным карданом) обеспечивающим равные
угловые скорости ведущего и ведомого
вала. Текущая мах. подача одним поршнем
соответствует максимальной относительной
скорости.
текущ. значение относительной скорости
поршня в цилиндре;-угловая
скорость вала. Приведенное выражение
справедливо для насоса с синхронным(
двойным карданом) обеспечивающим равные
угловые скорости ведущего и ведомого
вала. Текущая мах. подача одним поршнем
соответствует максимальной относительной
скорости.![]()
![]() Мгновенная
(текущая) подача насоса определяется
суммой подач всеми поршнями находящимися
в нагнет. полости:
Мгновенная
(текущая) подача насоса определяется
суммой подач всеми поршнями находящимися
в нагнет. полости:![]() α1,α2,…αi-текущие
углы поворота цилиндров относительно
исходной плоскости отсчета( относительно
оси, при совпадении с которой поршни
находятся в крайних положениях).n-число
цилиндров находящихся одновременно в
полости нагнетания,т.к. вычисление
мгновенной подачи для аксиально-поршневых
гидромашин не отличается от
радиально-поршневых г/машин, то и
неравномерность подачи подсчитывается
по выражениям используемым для расчета
радиально-поршневых г/машин. Для
выравнивания подачи используют различные
конструктивные решения .В частности
применяют метод размещения цилиндров
в блоке, а головок шатунов в диске на
разных радиусах(дезаксиал насоса), а
также метод «сгущения» поршней
зак5лючающийся в неравномерном угловом
расположении осей цилиндра в блоке.
α1,α2,…αi-текущие
углы поворота цилиндров относительно
исходной плоскости отсчета( относительно
оси, при совпадении с которой поршни
находятся в крайних положениях).n-число
цилиндров находящихся одновременно в
полости нагнетания,т.к. вычисление
мгновенной подачи для аксиально-поршневых
гидромашин не отличается от
радиально-поршневых г/машин, то и
неравномерность подачи подсчитывается
по выражениям используемым для расчета
радиально-поршневых г/машин. Для
выравнивания подачи используют различные
конструктивные решения .В частности
применяют метод размещения цилиндров
в блоке, а головок шатунов в диске на
разных радиусах(дезаксиал насоса), а
также метод «сгущения» поршней
зак5лючающийся в неравномерном угловом
расположении осей цилиндра в блоке.
П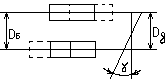 ри
наклонном положении диска (γ>0) или
блока гидромашины шатуны
ри
наклонном положении диска (γ>0) или
блока гидромашины шатуны
при вращении ротора будут перемещаться не ׀׀-но оси блока,а совершать
колебательное движение, что отражается на кинематике вращения порш-
ней. Это обусловлено тем, что при повороте диска центры крепления ша-
т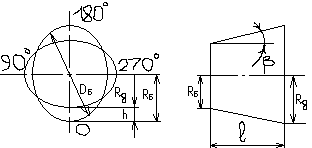 унов
в диске будут перемещаться по эллипсу,
а центры поршней по окружности, поэтому
при постоянной угловой скорости
приводного вала(диска) будем иметь
переменную (колебательную) в пределах
каждого оборота вала угловую скорость
ведомого звена(блока). Это рассогласование
влияет на закон перемещения поршней в
цилиндрах и увеличивает неравномерность
подачи. Совмещение диаметра блока с
эллипсом, полученным при наклоне диска,
позволяет установить, что угловые
скорости приводного вала и блока
выравниваются при углах поворота
относительно нейтральной оси равном
900 и 2700. Мах. рассогласование
этих скоростей достигает при α=00α=1800.
унов
в диске будут перемещаться по эллипсу,
а центры поршней по окружности, поэтому
при постоянной угловой скорости
приводного вала(диска) будем иметь
переменную (колебательную) в пределах
каждого оборота вала угловую скорость
ведомого звена(блока). Это рассогласование
влияет на закон перемещения поршней в
цилиндрах и увеличивает неравномерность
подачи. Совмещение диаметра блока с
эллипсом, полученным при наклоне диска,
позволяет установить, что угловые
скорости приводного вала и блока
выравниваются при углах поворота
относительно нейтральной оси равном
900 и 2700. Мах. рассогласование
этих скоростей достигает при α=00α=1800.
Под дезаксиалом понимают отношение диаметров
крепления шатунов на диске к размещению поршней
в блоке: К=![]() ;h=Rдэл-Rб.Rдэл-minрадиус эллипса
;h=Rдэл-Rб.Rдэл-minрадиус эллипса
для данных значений угла наклона диска
(блока) γ радиусов диска и блока RдиRби длины
шатуна.sinβ=h/l=![]() ;
β=arcsin
;
β=arcsin![]() .
Для мах. снижения колебаний шатунов
значенияRдиRбд.б. подобраны так, чтобы обеспечить
условие:
.
Для мах. снижения колебаний шатунов
значенияRдиRбд.б. подобраны так, чтобы обеспечить
условие:
![]()
![]() ;γ=300
Км=1,055…1,072–насос,Км=1,072-мотор.
;γ=300
Км=1,055…1,072–насос,Км=1,072-мотор.
3. Построение вторичного графа по заданной тактограмме, цель его построения.
Он необходим для составления у-й выходных сигналов. Строится: 1.Проводится круг.
2.Делится круг как и в первичном графе начиная с верхней точки на число тактов приведенных в первичном графе.3.В каждой вершине(точке) вторичного графа проводится кружочек, в кот. записываются входные сигналы для блока управления, причём если в первичном графе была вершина 1, то во вторичном графе пишется х11, если 21, то х2.4.По часовой стрелке на большом круге откладываем между вершинами хiвыходные сигналыyi.
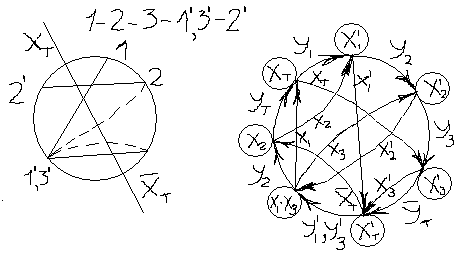
5.Строятся сигнальные линии внутри вторичного графа: А.)Конец выходного сигнала уiсоединяется с началом сопряжённого сигналаyi1и наоборот. Б.)Сигнальные линии обозначаются теми же линиями, которыми обозначены вершины из которых они выходят.
В.)Определяются зоны действительных и нулевых значений опорных сигналов по сигнальным линиям. Зона действительных значений входного сигнала хi=1 принадлежащего какой-то сигнальной линии располагается слева от сигнальной линии по направлению стрелки, а зона нулевых значений хi=0 справа от сигнальной линии.