

Билет 2
1.Уравнение движения гидропривода.
 В
общем виде д.у. движения дроссельного
ГП является нелинейным. Обычно зависимость
Q(P,x)
лианеризуют и получают
В
общем виде д.у. движения дроссельного
ГП является нелинейным. Обычно зависимость
Q(P,x)
лианеризуют и получают
![]() (1). KQX
- коэффициент
усиления золотника по расходу. КQP
- коэффициент
скольжения. Х- перемещение золотника.
Р-приращение давления Q-
приращение расхода.
(1). KQX
- коэффициент
усиления золотника по расходу. КQP
- коэффициент
скольжения. Х- перемещение золотника.
Р-приращение давления Q-
приращение расхода.
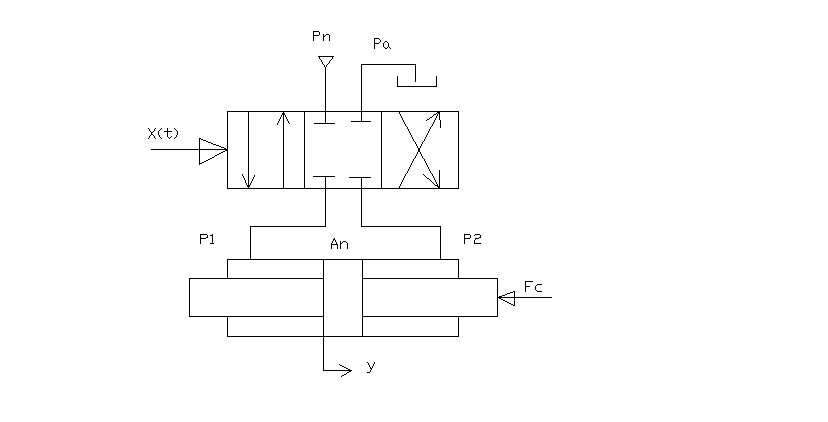
Применяемые допущения: 1) Динамический процесс происходит при установившемся движении привода при среднем положении поршня в цилиндре. 2) пренебрегаем в виду малости сухим трением. 3) на динамику привода не влияют волновые процессы. 4) модуль объемной упругости ж., коэффициент расхода μ , вязкость жидкости и Рп постоянные величины. 5) Пренебрегаем гидравлическими потерями в каналах.
Движение ГП представим в виде 2-х уравнений:
1)Уравнение движения поршня (ротора)
2) Баланс расходов
![]() (2)
(2)![]() -приведенная
к поршню ГЦ масса жидкости, подвижных
частей ГЦ и нагрузки.
-приведенная
к поршню ГЦ масса жидкости, подвижных
частей ГЦ и нагрузки.![]() -
приращение в движущей силе.
-
приращение в движущей силе.![]() -
приращение сил сопротивления.
-
приращение сил сопротивления.![]() (3), Р=Р1-Р2
– перепад давления. Приращение сил
сопротивления при вязком трении
(3), Р=Р1-Р2
– перепад давления. Приращение сил
сопротивления при вязком трении
![]() (4)b-
коэффициент вязкого трения. Сп
–коэффициент
позиционной нагрузки. С учетом 3 и 4
запишем:
(4)b-
коэффициент вязкого трения. Сп
–коэффициент
позиционной нагрузки. С учетом 3 и 4
запишем:![]() (5)
– ГЦ
(5)
– ГЦ![]() (6) – ГМI=Iгм+IН/i2
Iгм
– мом инерц ГМ, IН–нагрузки,
i-перед
число редуктора. bφ-коэфф
вязк трен привед к оси вала. q-
уд раб объем. У-я баланса расх с уч сжим.
ж и перет с одной пол в др.
(6) – ГМI=Iгм+IН/i2
Iгм
– мом инерц ГМ, IН–нагрузки,
i-перед
число редуктора. bφ-коэфф
вязк трен привед к оси вала. q-
уд раб объем. У-я баланса расх с уч сжим.
ж и перет с одной пол в др.
![]()
![]() Q1=Q2=Qтреб
V1=V2=V
Q1=Q2=Qтреб
V1=V2=V![]()
![]()
![]()
![]() -
коэффициент объемных потерь. Р=Р1-Р2
– перепад давления.
-
коэффициент объемных потерь. Р=Р1-Р2
– перепад давления.
![]()
![]() (7)
(7)
E-
адиабатный модуль объемной упругости
жидкости. В динамических процессах
расход жидкости поступающей в ГД от
распределителя должен быть равен расходу
для адиабатического процесса движения
ГД.
![]()
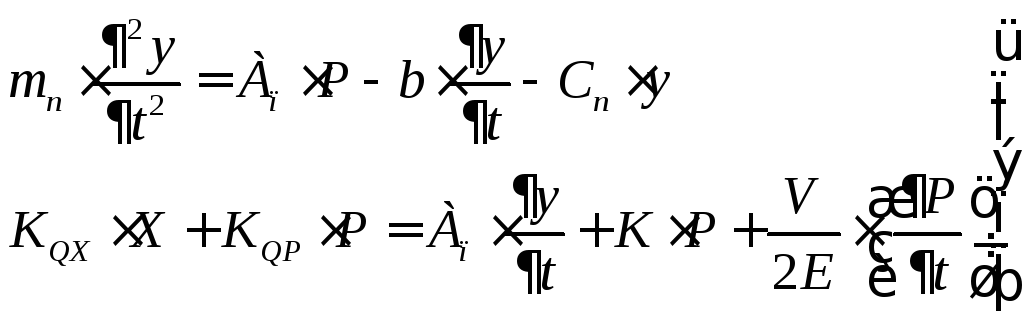 (9) - Уравнение
движения гидропривода
(9) - Уравнение
движения гидропривода
2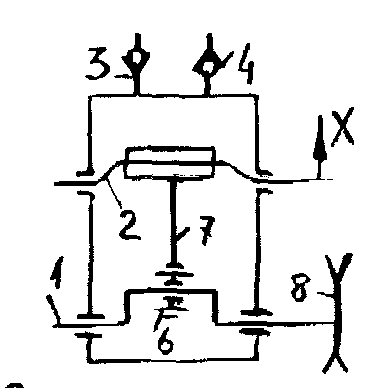 .
Компрессоры диафрагменного типа.
Назначение, принцип действия, особенности
конструкции. Основные параметры.
.
Компрессоры диафрагменного типа.
Назначение, принцип действия, особенности
конструкции. Основные параметры.
Мембранные компрессоры по своему устройству и принципу действия относятся к группе поршневых. Применяются мембранные компрессоры 2х типов: с приводом гибкой мембраны непосредственно от кривошипно-шатунного механизма и с гидроприводом.
При невысоких частотах вращения МК приводят через клиноременную передачу от электродвигателя. Поэтому на одном из концов коленчатого вала1 крепят шкив 8. На валу с эксцентриситетом посажен шариковый подшипник, внешнее кольцо которого укреплено в шатуне 7. Шатун совершает периодическое движение вверх-вниз. Имеется два клапана: всасывающий и нагнетательный. Такие МК используют для сжатия газа в небольших объёмах до невысоких давлений (0,3МПа). Мембраны изготавливают из материалов, допускающих большое число циклов нагружения при относительно больших прогибах, например из прорезиненной ткани или резины. В МК с гидроприводом прогиб металлической мембраны вызывается возвратно-поступательным перемещением столба жидкости, на который воздействует через кривошипно-шатунный механизм поршень гидропривода. Металлические мембраны работают в пределах упругих деформаций. Т.к. площадь поверхности мембраны и масса металлического блока относительно велики, происходит интенсивное охлаждение сжимаемого газа. При малом относительном объёме мёртвого пространства камер это позволяет достигать высокой степени сжатия в каждой ступени. Для достижения давления в 100 МПа достаточно 3х ступеней сжатия.
Эффективной площадьюмембраны
привода называют условную площадь
равную отношению рабочего усилия,
развиваемого мембраной под действием
перепада давления к этому перепадуАэф=N/P
Эффективная площадь мембраны зависит
отХ, т.е. от перемещения её центра
от нулевого уровня, за который принимают
поверхность заделки диафрагмы. При
увеличении Х эффективная площадь
мембраны также как и развиваемое ею
усилиеNпадает. Прогиб
мембраны в пневмоприборах – сотые доли
мм, в промышленных пневмоустройствах
эта величина может достигать 50мм. Для
расчёта эфф.площади мембраны можно
использовать упрощённую зависимость:
![]()
Объём мембранной камеры: VM=AM(x+hi), гдеAM – полная площадь мембраны по наружному диаметру; hi – начальная координата центра мембраны.