

Билет 4
Уранвения динамики двухстороннего пневмопривода
Динамический расчет пневмо привода заключается в определении его рабочего цикла.
Время срабатывания распределителя t1 определяется в зависимости от его конструкции, оно находится как время движения золотника под действием электро механических и других сил.Часто этим временем пренебрегают из-за его малости по сравнению с временем цикла.
Время распространения волны давления
от распределителя до двигателя
определяется по формуле![]() .где
.где![]() -
длинна трубопровода, а-скорость звука
в воздухе (а=341м/с).
-
длинна трубопровода, а-скорость звука
в воздухе (а=341м/с).
Время изменения давления в рабочих
полостях двигателя до начала движения
поршня
![]() определяется
как время наполнения рабочей полости
и веремени истечения сжатого воздуха
в атмосферу.
определяется
как время наполнения рабочей полости
и веремени истечения сжатого воздуха
в атмосферу.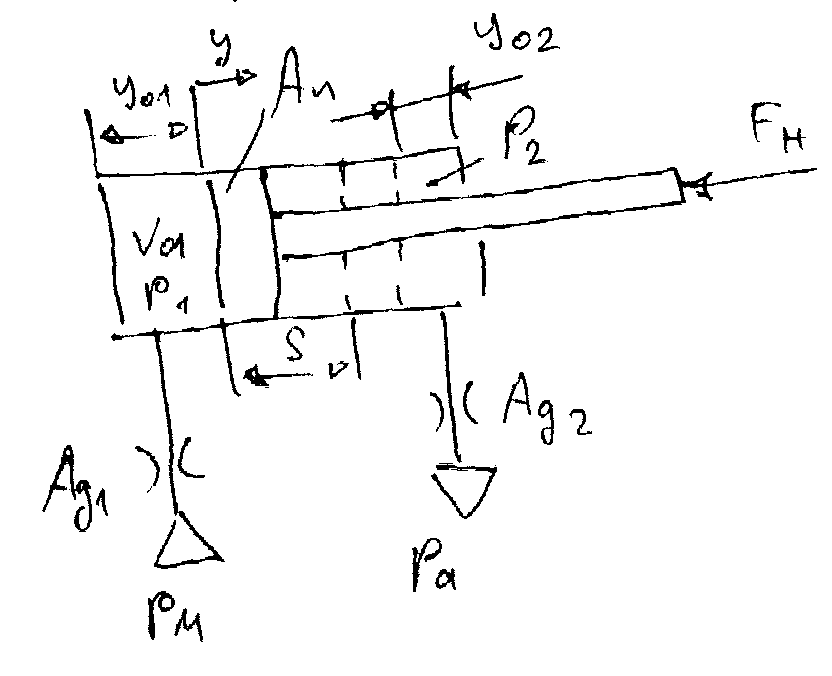 Время
заполнения сжатого воздуха определяется
по формуле
Время
заполнения сжатого воздуха определяется
по формуле

где
![]() -начальный
обьем рабочей полости трубопровода
соединяющего его с пневмораспределителем
-начальный
обьем рабочей полости трубопровода
соединяющего его с пневмораспределителем
![]()
 -Скорость
звука в заторможенном состоянии;
-Скорость
звука в заторможенном состоянии;![]() -давление
в магистрали.P1нач-начальное
давление в рабочей полости. Р1к-давление
соответствующее начальному движению
поршня. φ(р1/рм) -функция
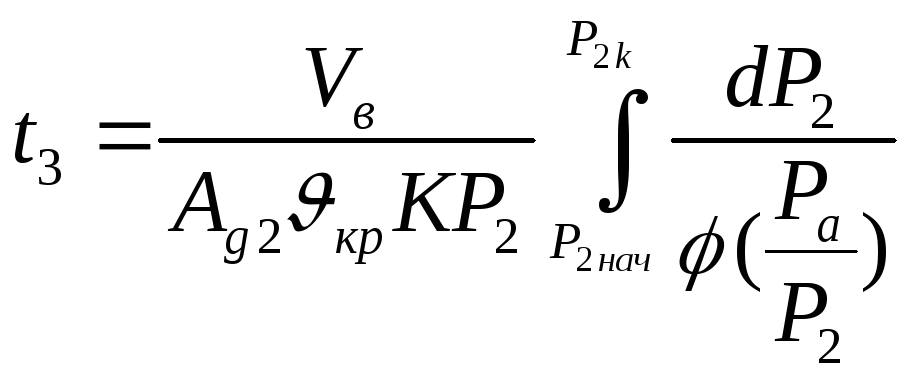
расхода. Время истечения воздуха
определяется по формуле, гдеVв-обьем
выхлопной полости. Ра-атмосферное
давление; Р2-текущее давление в выхлопной
полости Р2нач-начальное давление.φ(ра/р2)
-функция расхода. Для определения
давлений Р1к и Р2к необходимо использовать
уравнения равновесия поршня: Р1Аn-АшР2=Fн.
Ур-я движения поршня двухстор. пневмопривода
имеет вид
-давление
в магистрали.P1нач-начальное
давление в рабочей полости. Р1к-давление
соответствующее начальному движению
поршня. φ(р1/рм) -функция
расхода. Время истечения воздуха
определяется по формуле, гдеVв-обьем
выхлопной полости. Ра-атмосферное
давление; Р2-текущее давление в выхлопной
полости Р2нач-начальное давление.φ(ра/р2)
-функция расхода. Для определения
давлений Р1к и Р2к необходимо использовать
уравнения равновесия поршня: Р1Аn-АшР2=Fн.
Ур-я движения поршня двухстор. пневмопривода
имеет вид![]() (1)
(1)
m-масса поршня и присоедененных последовательно к нему движущихся частей
b- коэф вязкого трения с-жесткость нагрузки Уравнение 1 записано для общего случая нагружения привода как переменными так и постоянными силами
![]() -время
в течение которого поршень совершает
рабочий ход. Уравнение 1 решаем совместно
с уравнениями характеризующими изменения
давлений в рабочей и выхлопной полостях
цилиндра. Для наполнения:
-время
в течение которого поршень совершает
рабочий ход. Уравнение 1 решаем совместно
с уравнениями характеризующими изменения
давлений в рабочей и выхлопной полостях
цилиндра. Для наполнения:![]() (2)
(2)
формула для опорожнения
![]() (3)
(3)
Р![]() ешение
нелинейных уравнений 1,2,3 производится
численными методами интегрирования,
шаг интегрирования выбирают в зависимости
от точности расчета, интегрирование
проводится до тех пор покаy=s.
Заключительное время
ешение
нелинейных уравнений 1,2,3 производится
численными методами интегрирования,
шаг интегрирования выбирают в зависимости
от точности расчета, интегрирование
проводится до тех пор покаy=s.
Заключительное время![]() -
в течении которого давление в рабочей
полости возрастает до требуемой величины,
а выхлопное падает до атмосферного. За
начальные параметры принимается давления
Р1 и Р2 в конце движения.в большинстве
случаев учитывается только время
наолнения. Уравнения динамики
одностороннего привода
-
в течении которого давление в рабочей
полости возрастает до требуемой величины,
а выхлопное падает до атмосферного. За
начальные параметры принимается давления
Р1 и Р2 в конце движения.в большинстве
случаев учитывается только время
наолнения. Уравнения динамики
одностороннего привода
легко получить из рассмотренных уравнений динамики двухпозиционного пневмопривода как частный случай.
2.Насосы с механическим приводом. Подача насоса. Диаграмма подачи однопоршневого насоса. Способы выравнивания подачи.
Поршневой насос – это гидромашина в которой преобразование механической энергии в гидравлическую осуществляется с помощью вытеснителя, совершающего возвратно-поступательное движение в цилиндре.
Насосы с механическим приводом применяют для перемещения больших объёмов жидкости при сравнительно высоких давлениях.
В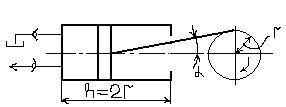 еличина
ходаhпоршня равна 2r.
еличина
ходаhпоршня равна 2r.
Рабочий объём: q=h*S=2r*S(м3)S– площадь поршня.
Средняя расчётно-геометрическая подача: QT=g*n=2r*S*n, (м3/с)
n– частота вращения кривошипа.
Также подачу можно представить в таком
виде: Q=Vп*Sп,
поскольку площадь поршня для данного
насоса =const, то изменение
текущей подачи зависит лишь от изменения
скорости:Q=VпSп=S*r*![]() *sin
*sin![]() ,
гдеVп=r*
,
гдеVп=r*![]() *sin
*sin![]()
Подача на графике представляется в виде
sin-ды, т.е. носит неравномерный
пульсирующий характер.![]() - характеризует неравномерность подачи.Qcр=h*S*n;Qmax=S*r*
- характеризует неравномерность подачи.Qcр=h*S*n;Qmax=S*r*![]()
 Рис.
Диаграмма подачи одно-поршневого насоса.
Рис.
Диаграмма подачи одно-поршневого насоса.
Из диаграммы видно, что работа насоса имеет пульсирующий характер.
Б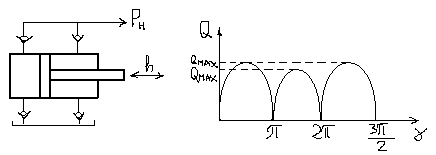 олее
равномерная подача рабочей жидкости
достигается в поршневых насосах 2-ух
кратного действия.
олее
равномерная подача рабочей жидкости
достигается в поршневых насосах 2-ух
кратного действия.
О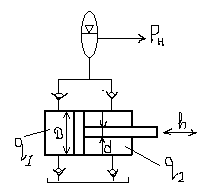 сновной
способ выравнивания подачи является
применение насосов многократного
действия.
сновной
способ выравнивания подачи является
применение насосов многократного
действия.
Схема насоса 2-х кратного действия с гидроаккумулятором.
У такого вида насоса будет неравномерность
подачи в следствии разности рабочих
объёмов(q1иq2):![]()
Можно обеспечить равные подачи такого
насоса при прямом и обратном ходе поршня
конструктивными мероприятиями при
условии :
![]() илиD2=2d2
Подача как при прямом так и при
обратном ходе поршня
илиD2=2d2
Подача как при прямом так и при
обратном ходе поршня![]()
![]()
Д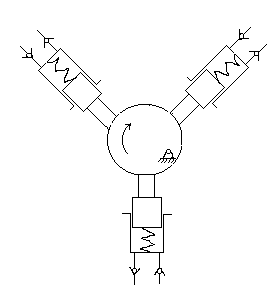 ля
выравнивания подачи применяют кулачковые
насосы с несколькими цилиндрами,
например, с 3-ёх цилиндровый поршневой
насос рис1., аксиально-поршневой насос
рис2.
ля
выравнивания подачи применяют кулачковые
насосы с несколькими цилиндрами,
например, с 3-ёх цилиндровый поршневой
насос рис1., аксиально-поршневой насос
рис2.
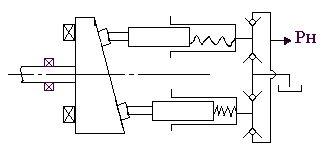 Рис. 1
Рис.2
Рис. 1
Рис.2
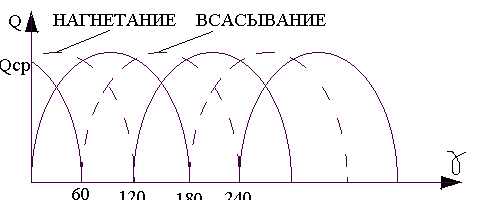
Диаграмма подачи 3-х поршневого насоса. Из диаграммы видно, что с увеличением числа цилиндров выравнивается подача насоса.
3. Гидроусилитель с гидромеханической ОС
Гидроусилитель – гидропривод
предназначенный для преобразования
входного сигнала Хупр в перемещение У
выходного звена привода.На рис-ке
представлен ГУ с гидромеханической ОС.
П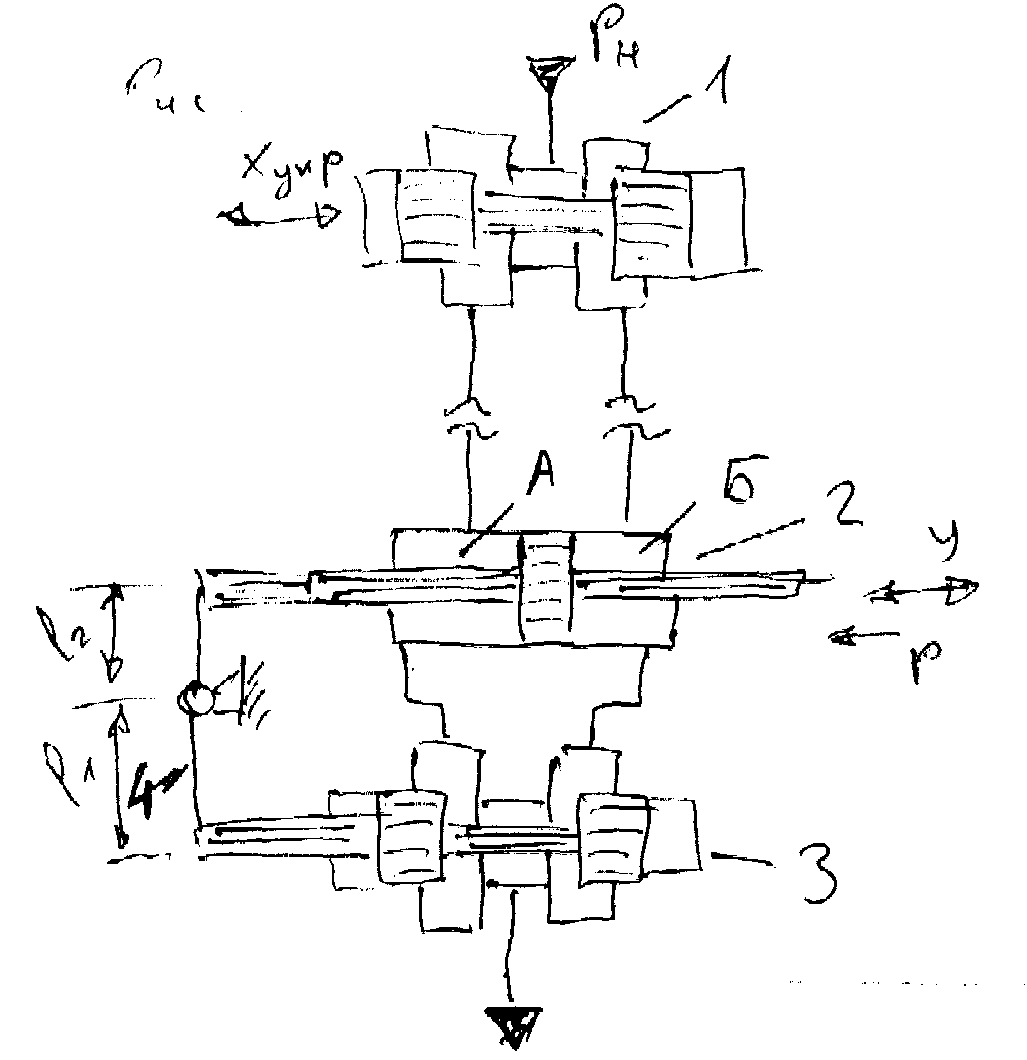 ри
нейтральном положении золотника распр-ля
1 расходы через щели распр-ля одинаковы.
Силы действующие на поршень гидродвмгателя
в полостя А и Б уравновешивают друг
друга. Поршень не двигается. Расходы
ж-ти через щели распр-ля 3 также равны.
При перемещении золотника р-ля 1 влево
– ГЦ2 двигается вправо, через рычаг 4
перемещая влево золотник р-ля 3. Равновесное
состояние системы наступит в тот момент,
когдарасходы через правые и левые щели
распр-лей сравняются. При перемещении
золотника р-ля 1 вправо процесс повторяется
в обратном порядке. При возникновении
силы Р стремящейся переместить поршень
ГЦ влево двигаясь поршень черкз рычаг
4 перемещает золотник р-ля 3 вправо
перекрывая щель связывающую полость А
ГЦ2 со сливом. В полостях А и Б возникает
давление
ри
нейтральном положении золотника распр-ля
1 расходы через щели распр-ля одинаковы.
Силы действующие на поршень гидродвмгателя
в полостя А и Б уравновешивают друг
друга. Поршень не двигается. Расходы
ж-ти через щели распр-ля 3 также равны.
При перемещении золотника р-ля 1 влево
– ГЦ2 двигается вправо, через рычаг 4
перемещая влево золотник р-ля 3. Равновесное
состояние системы наступит в тот момент,
когдарасходы через правые и левые щели
распр-лей сравняются. При перемещении
золотника р-ля 1 вправо процесс повторяется
в обратном порядке. При возникновении
силы Р стремящейся переместить поршень
ГЦ влево двигаясь поршень черкз рычаг
4 перемещает золотник р-ля 3 вправо
перекрывая щель связывающую полость А
ГЦ2 со сливом. В полостях А и Б возникает
давление![]() действующее
на поршень с силой Р1, стремящейся вернуть
р-ль в исходное состояние.
действующее
на поршень с силой Р1, стремящейся вернуть
р-ль в исходное состояние.
“+” – возможность управления на больших расстояниях
Мех-я ОС – с помощью рычага; Гидр-я ОС – путем изменения проход. сеч. в нижнем р-ле.