

4.2.8 Многозвенные зубчатые механизмы
При проектировании зубчатых механизмов возникает необходимость передавать вращение с большим передаточным отношением или при значительных межосевых расстояниях. В таких случаях применяют многозвенные зубчатые механизмы либо снижающие скорость вращения ведомого вала по сравнению с ведущим (редукторы), либо повышающие ее (мультипликаторы). Эти механизмы могут быть как плоскими, так и пространственными.
Многозвенные зубчатые механизмы– механизмы, состоящие из простейших зубчатых механизмов, общее передаточное отношение которых рассчитывается по формуле (4.20). Они бывают с неподвижными осями (цилиндрические, конические, червячные редукторы) и с подвижными осями (планетарные и дифференциальные редукторы).
4.2.8.1 Многозвенные механизмы с неподвижными осями
Как указывалось в п. 4.2.1, простейшим зубчатым механизмом является одноступенчатый редуктор (рисунок 4.20, а). Если зубчатый механизм имеет более одной ступени, то он является многозвенным (многоступенчатым).
Проектирование многоступенчатых редукторов заключается в подборе по заданному общему передаточному отношению основных размеров колес и их чисел зубьев. При этом необходимо учитывать и некоторые дополнительные условия, связанные с конструктивными требованиями. Например, если оси колес 1 и 3 расположены на одной оси, то такой редуктор является соосным (рисунок 4.38, б) и для него должно выполнятьсяусловие соосности:
r1+r2 =r2+r3илиz1+z2 =z2+z3.
а)б)в)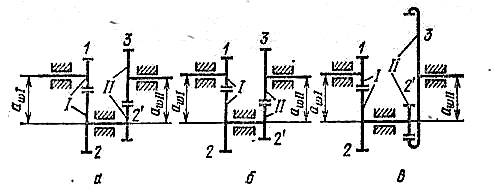
а- несоосный;б- соосный;в- соосный с внешним
и внутренним зацеплением.
Рисунок 4.38 - Двухступенчатые цилиндрические редукторы
Разновидностей многоступенчатых редукторов очень много. Многозвенные механизмы могут проектироваться в сочетании цилиндрического и конического редукторов, цилиндрического и червячного редукторов и др. Это необходимо для уменьшения габаритных размеров механизмов.
Более подробно проектирование многоступенчатых цилиндрических редукторов рассматривается в курсе «Детали машин».
4.2.8.2 Многозвенные механизмы с подвижными осями
Многозвенные зубчатые механизмы с подвижными осями могут быть как с жесткими колесами (планетарные редукторы), так и с гибкими (волновые передачи).
Достоинством механизмов с подвижными осями является их ощутимая компактность по сравнению с механизмами с неподвижными осями, более высокий КПД и большое передаточное отношение.
Планетарные механизмы подразделяются на:
планетарные редукторыимультипликаторы(рисунок 4.39,а) – зубчатые механизмы с подвижной осью вращения, которые имеют опорное колесо и обладают одной степенью подвижностиW= 1.
дифференциальные механизмы (рисунок 4.39,б) – со степенью подвижностиW= 2 или более и которые не имеют опорного колеса.
Планетарные и дифференциальные механизмы изготавливают, как правило, соосными.
Рассмотрим структуру планетарного редуктора (рисунок 4.39, а).
Колеса с подвижными осями вращения называются планетарнымиилисателлитами(z2). Звено, на котором располагаются оси сателлитов называетсяводилом(на кинематических схемах водило обозначается буквой Н). Зубчатое колесо с неподвижной осью вращения называетсясолнечным илицентральным(z1). Неподвижное колесо называетсяопорным(z3).
а) б)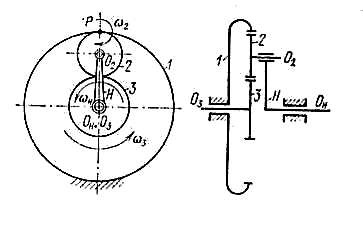
а- планетарный механизм;б- дифференциальный механизм.
Рисунок 4.39. - Механизмы с подвижными осями
Степень подвижности планетарного редуктора равна 1 (W= 3n- 2p5 -p4 = 32-22-1 = 1). Поэтому редуктор имеет постоянное передаточное отношение.
Если в рассмотренном механизме освободить от закрепления опорное колесо z3сообщить ему вращение, то все центральные колеса станут подвижными и механизм превратиться в дифференциальный (рисунок 4.39,б), т.к. степень подвижности его будет равна 2 (W= 3n- 2p5 -p4 = 34 - 24 - 2 = 2). Наоборот, любой дифференциал можно превратить в планерный редуктор, если закрепить его одно или несколько центральных колес. Это свойство планетарных редукторов носит названиесвойства обратимости. Оно позволяет применять одинаковые методы исследования и проектирования для планетарных редукторов и для дифференциалов.