

3.3.5 Трение во вращательной кинематической паре
В зависимости от расположения прикладываемой нагрузки (силы тяжести), трение во вращательной кинематической паре различают:
Тело нагружено поперечной радиальной силой G(вал-подшипник).
Тело нагружено осевой силой G(пята-подпятник).
1-ый вид трения возникает в тормозных устройствах, 2-ой – в муфтах сцепления с плоскими дисками.
1
Соприкосновение
элементов в кинематической паре
происходит в точке А, где реакция R21
параллельна
силе G.
Полная реакция R21
должна отклониться от нормали на угол
трения φ. Тогда величина силы трения
по закону Кулона будет равна: Fтр=ƒN.
Сила нормального
давления N
= R21cosφ.

 G
G
 МтрR21
МтрR21



 N
N





















 Fтр
Fтр





 A
A

Рисунок 3.47 - Вал в подшипнике
Так как при равновесии подшипника G = R21, то сила N = Gcosφ.
Тогда сила трения определится:
Fтр=ƒGcosφ
Момент, приложенный к подшипнику, уравновешивается моментом трения:
Мтр= Fтрr =ƒGrcosφ,
где r– радиус вала. Коэффициент трения ƒ=tgφ. Поэтому
Мтр=Gr cosφ tgφ = Grsinφ,
так как tgφ =sinφ/cosφ.
Обозначим ρ = r sinφ. Тогда момент трения
Mтр= Gρ = R21ρ. (3.113)
Круг
трения
Если
из центра вала О описать окружность
радиусом ρ,
то полная реакция R21
будет направлена по касательной к этой
окружности (рисунок 3.48). Круг радиусом
ρ
называется
кругом
трения.



























Рисунок 3.48 - Круг трения
2. Пята-подпятник. В этом случае на поверхности соприкосновения пяты и подпятника возникает сила трения верчения, подчиняющаяся закону Кулона.


 а)Fтрб)Fтр
а)Fтрб)Fтр






































 GNGNR
GNGNR



























 Rr
Rr



а- кольцевая пята,б- сплошная пята.
Рисунок 3.49 - Пята с подпятником
Момент трения для кольцевой пяты (рисунок 3.49, а)
![]() (3.114)
(3.114)
Момент трения для сплошной пяты, когда r= 0 (рисунок 3.49,б)
![]() (3.115)
(3.115)
Мы рассмотрели сухое трение в низших кинематических парах. Этого достаточно для понимания природы трения.
Вопросы для самоконтороля
В чем отличие сухого трения от жидкостного? Полусухого от полужидкостного?
От чего зависти коэффициент трения?
Как направлена реакция в поступательной кинематической паре с учетом силы трения?
Записать формулы силы трения для поступательного движения, для вращательного движения, для винтового движения.
Что такое угол трения? Конус трения? Круг трения?
Главы 1, 2 и 3 рассматривали кинематику, динамику и анализ движения механизмов с низшими кинематическими парами. В 4-ой главе рассмотрим синтез (проектирование) механизмов с высшими кинематическими парами.
Глава 4синтез механизмов с высшими кинематическими парами
§ 4.1Синтез кулачковых механизмов
4.1.1 Применение и классификация кулачковых механизмов
При проектировании механизмов часто нужно знать закон движения ведомого звена. Если проектируются механизмы с низшими кинематическими парами, то закон движения известен – это либо прямая линия (например, для строгания), либо окружность (сверление). Но чаще ведомое звено совершает сложное движение по заданному закону. По данной траектории и проектируют кулачковые механизмы.
Кулачковые механизмы получили широкое распространение в машинах и приборах. Например, в двигателях внутреннего сгорания (в механизмах газораспределения) они используются для открывания и закрывания впускных клапанов, в токарных полуавтоматах для регулирования хода резца и т.д. Поэтому, в зависимости от назначения, разновидностей кулачковых механизмов великое множество. Основное достоинство: простота изготовления и получение любой траектории ведомого звена – толкателя.
Простейший кулачковый механизм состоит из кулачковой шайбы 1 (или просто кулачка); ролика 2, который огибает кулачковую шайбу; толкателя 3 (штанги) и опоры 4 (рисунок 4.1 а ,б).
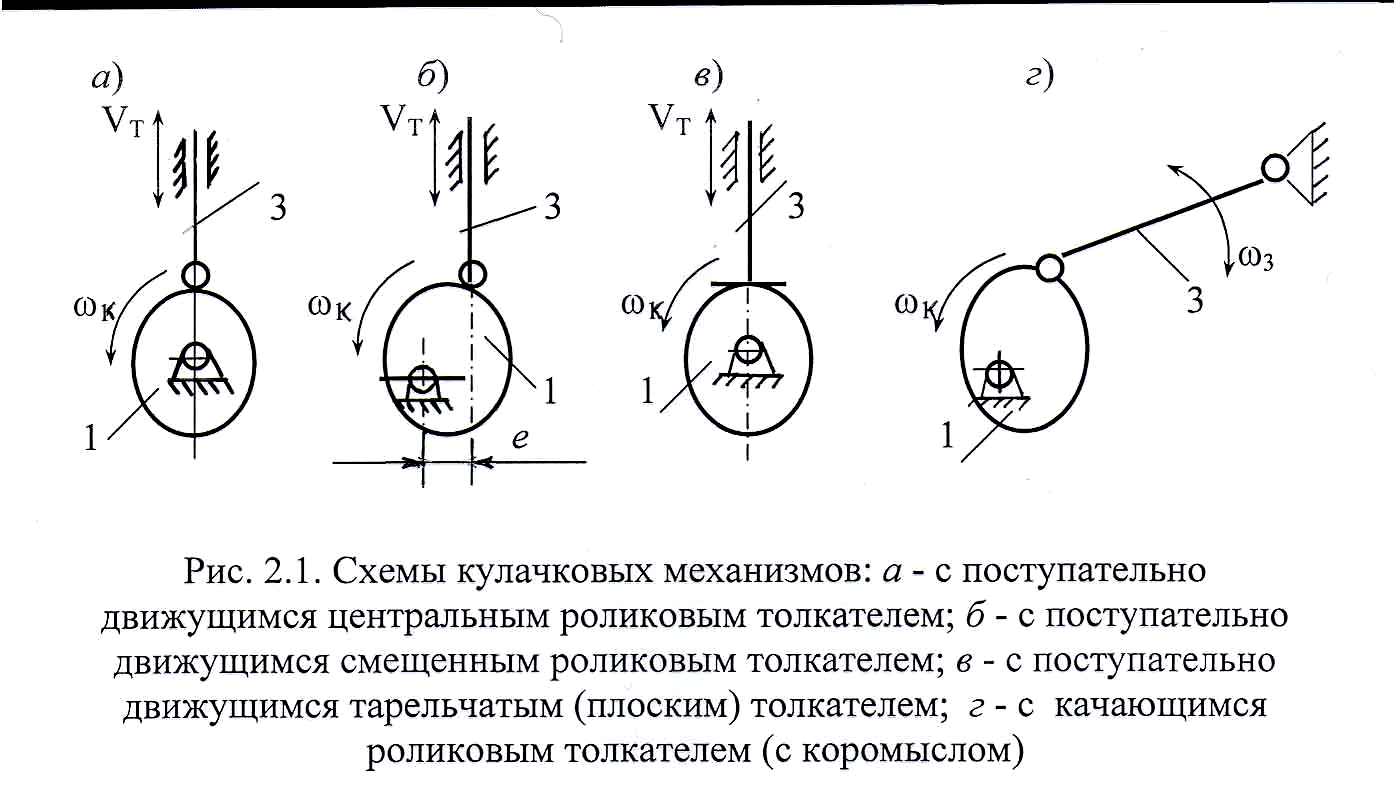
а - с поступательно движущимся центральным роликовым толкателем;
б - с поступательно движущимся смещенным роликовым толкателем;
в - с поступательно движущимся тарельчатым (плоским) толкателем;
г - с качающимся роликовым толкателем (с коромыслом).
Рисунок 4.1 - Схемы плоских кулачковых механизмов
Ведущее звенов кулачковых механизмах называетсякулачком.На кинематических схемах кулачок обозначается цифрой 1.Ведомое звеноназываетсятолкателем, обозначается предпоследней цифрой.
По характеру движения толкателя кулачковые механизмы делятся:
с поступательно движущимся толкателем (рисунок 4.1, а-в);
с качающимся толкателем (рисунок 4.1, г).
Если траектория движения толкателя совпадает с осью вращения кулачка, то такой механизм называется кулачковым механизмом с центральным роликовым толкателем (рисунок 4.1, а). Если траектория движения толкателя не совпадает с осью вращения кулачка (образуется расстояниее– эксцентриситет или смещение), то такой механизм называется кулачковым механизмом со смещенным роликовым толкателем (рисунок 4.1,б).
Кулачок очерчен профилем. Профиль кулачка– сечение кулачка плоскостью, параллельной плоскости движения кулачка.
Кулачковые также как и все другие механизмы бывают:
Плоские– кулачковые механизмы, движение звеньев которых осуществляются в параллельных плоскостях (рисунок 4.1,а-г).
Пространственные– кулачковые механизмы, все точки которых движутся по замкнутым пространственным кривым (рисунок 4.2,а).
Плоские кулачковые механизмы также различают по характеру контакта кулачка и толкателя, а также по характеру движения кулачка и толкателя (таблица 4.1).
Таблица 4.1 - Классификация кулачковых механизмов по характеру контакта
|
Характер движения кулачок- -толкатель |
Вид контакта | |||
|
Ролик |
Прямая |
Точка |
Кривая | |
|
В-В |
ω |
ω |
ω |
ω |
|
В-П
|
ω |
ω |
|
|
|
П-В
|
VК |
VК |
VК |
|
|
П-П |
VК |
|
VК |
VК |
|
Примечание.ωК, ωТ– угловые скорости кулачка и толкателя; VT,VК- линейные скорости толкателя и кулачка. | ||||











 КωТ
КωТ




 КωТ
КωТ

 КωТ
КωТ




 КωТ
КωТ










 К
VT
К
VT




 КVT
КVT

 ωК
ωК 
 VT
VT ωК VT
ωК VT














 ωТ
ωТ






 ωТ
ωТ


 ωТ
ωТ




 ωТ
ωТ VК
VК








 VT
VT




 VT
VT






 VT
VT
По числу звеньев кулачковые механизмы делятся на
простые – состоят из 3-х звеньев (рисунок 4.1).
сложные – состоят из более чем 4-х звеньев (рисунок 4.2, б).
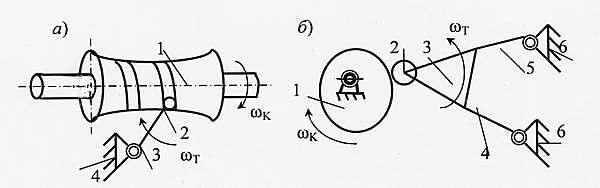
а- пространственный кулачковый механизм;
б- сложный кулачковый механизм.
Рисунок 4.2
При работе кулачковых механизмов необходимо постоянное соприкосновение ведущего и ведомого звеньев. Это касание может быть обеспечено: а) чисто геометрически, если выполнить кулачок в форме паза, боковые поверхности которого огибают ролик (рисунок 4.3, а);
б) с помощью пружины или силовое замыкание (рисунок 4.3, б).
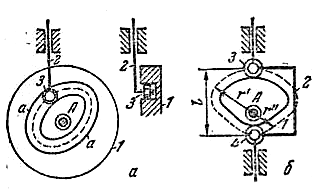

а- с геометрическим замыканием с пазовым кулачком;
б- с геометрическим замыканием с двумя кулачками в рамке;
в- с силовым замыканием с поступательно движущимся толкателем;
г- с силовым замыканием с качающимся коромысловым толкателем.
Рисунок 4.3 - Плоские кулачковые механизмы
Достоинства кулачковых механизмов:простота конструкций; возможность получить любой закон движения толкателя.
Недостатки:быстрый износ в высшей кинематической паре.
При проектировании кулачковых механизмов решаются 2 задачи:
Анализ работы кулачкового механизма – по заданным размерам и профилю кулачка определяется закон движения ведомого звена (толкателя);
Синтез кулачкового механизма – по заданному закону движения толкателя определяются размеры кулачка.
В дальнейшем мы рассмотрим только 2-ую задачу проектирования.