

4.2.8.3 Кинематика планетарных редукторов
Передаточное отношение любого зубчатого механизма рассчитывается по формуле (4.15):
U12 =ω1/ω2 =r2/r1 =z2/z1.
Определим передаточное отношение планетарного редуктора (рисунок 4.40, а). Скорость точки О2одинакова для колеса и водила:
VH =VO2 =ω2r2 = -ωH (r3-r2).
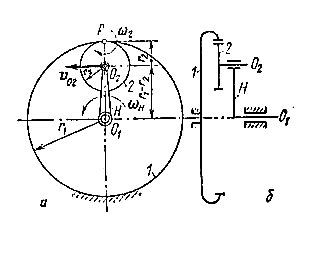
Рисунок 4.40. - К определению передаточного отношения
планетарного редуктора
Так как 3-е колесо неподвижно (опорное), то передаточное отношение от 1-го колеса к водилу будет вычисляться по формуле:
U1Н =ω1/ωН = (r1-r3)/r1 = 1-r3/r1 = 1-U13.
Или U31Н = 1 -UН13. (4.49)
Переставив слагаемые, получим:
U31Н + UН13 = 1.(4.50)
Формула (4.50) гласит: сумма передаточных отношений в планетарном механизме при любых останавливаемых звеньях всегда равна 1.
В формуле (4.50) верхний индекс указывает индекс неподвижного звена. ТогдаU31Н - передаточное отношение 1-го колеса к водилу Н при неподвижном колесе 3;UН13 - передаточное отношение 1-го колеса к 3-му при неподвижном водиле Н.
Определим передаточное отношение через числа зубьев. Для планетарного редуктора (рисунок 4.39, а) по формуле (4.50) имеем
![]() (4.51)
(4.51)
Для дифференциального редуктора (рис. 4.39, б)
![]() (4.52)
(4.52)
Определим передаточное отношение дифференциального редуктора через угловые скорости (рисунок 4.39, б).
Пусть звенья, входящие в кинематические пары со стойкой, движутся с угловыми скоростями ω1, ω3и ωН. Сообщим всем звеньям механизма дополнительное вращение вокруг оси ОНс угловой скоростью «-ωН», равной по величине и противоположной по направлению. Тогда звенья механизма будут иметь скорости:
ω 1Н
= ω1 - ωН
1Н
= ω1 - ωН
ω3Н = ω3 - ωН(4.53)
ωНН = ωН - ωН = 0.
Передаточное отношение от 1-го звена ко 2-му рассчитывается по формуле:
UН13= ω1Н/ ω3Н. (4.54)
Подставляя выражения (4.53) в формулу (4.54), имеем:
UН13
=![]()
Эту формулу можно обобщить для дифференциального механизма с любым числом колес до n:
UН1n=![]() (4.55)
(4.55)
Выражение (4.55) носит название формулы Виллисадля определения передаточного отношения дифференциального редуктора. Угловая скорость ω2не входит в эту формулу, т.к. колесо 2 является паразитным.
Механизмы дифференциалов широко применяются в автомобилях, счетных машинах, сельскохозяйственных машинах и т.д. Широкое распространение получили конические планетарные механизмы.
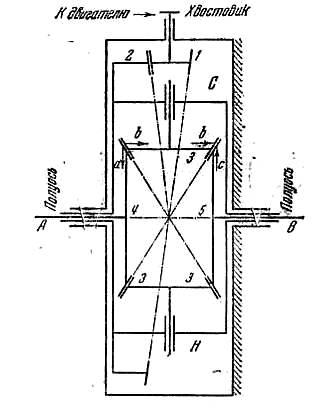
а- схема конического автомобильного дифференциала;
б- положение колес автомобиля при повороте.
Рисунок 4.41
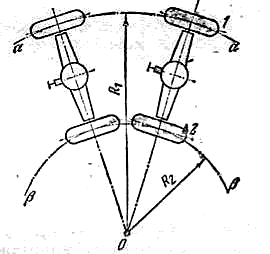
На рисунке 4.41, апоказан конический дифференциал, применяемый в автомобилях. При повороте ведущих колес автомобиля (рисунок 4.41,б) колесо1, катящееся во внешней кривой α-α, должно пройти больший путь, чем колесо2, катящееся по внутренней кривой β-β. Следовательно, скорость колеса1оказывается больше, чем колеса2. Чтобы воспроизвести это движение колес с различными угловыми скоростями, и применяется дифференциал.
Коническое зубчатое колесо 1(рисунок 4.41) получает вращение от двигателя. Это зубчатое колесо входит в зацепление с коническим зубчатым колесом2, вращающимся свободно на полуосиА. С колесом2 скреплена коробкаН, служащая водилом. В коробкеНсвободно на своих осях вращаются два одинаковых сателлита3. Сателлиты3находятся в зацеплении с двумя одинаковыми зубчатыми колесами4и5, скрепленными с полуосямиАиВ. Если колеса автомобиля двигаются по прямым, то можно считать, что моменты сил сопротивления на осяхАиВравны и, следовательно, сателлиты3находятся относительно их собственных осей вращения в равновесии, и они не поворачиваются вокруг своих осей. Тогда коробкаНвместе с сателлитами3и полуосиАиВвращаются как одно целое в одну и ту же сторону с одинаковой угловой скоростью. Как только колеса автомобиля начнут двигаться по кривым различных радиусовR1иR2(рисунок 4.41,б) сателлиты3начнут поворачиваться вкруг своих осей, и весь механизм будет работать как дифференциальный механизм.
Рассмотрим кинематику дифференциала. Передаточное отношение согласно формуле (4.55) будет иметь вид:
UН45=![]() ,
(4.56)
,
(4.56)
где n4иn5– числа оборотов в минуту коле 4 и 5;nH– число оборотов коробки Н (водила). Колесо 4 входит в зацепление с паразитными колесами 3 (сателлитами), которые в свою очередь сцепляются с колесом 5, одинаковым с колесом 4.
UН45=![]() .
(4.57)
.
(4.57)
Знак минус поставлен потому, что колеса 4 и 5 вращаются в разные стороны. Тогда окончательно имеем
UН45=![]() .
(4.58)
.
(4.58)
Разновидностей планетарных редукторов очень много. В нашу задачу не входит рассмотрение их структуры. Мы же должны сделать упор на синтезе (проектировании) зубчатых механизмов с подвижными осями.