Рис. 120
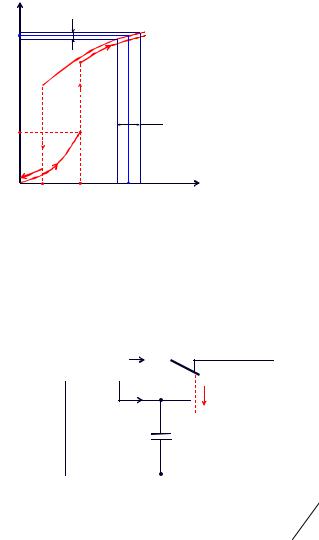
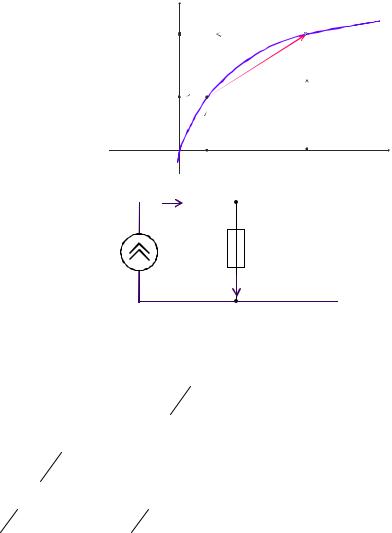
При питании от источника с большим сопротивлением ( ZИ → ∞ ) при незначительном изменении тока (I) наблюдаются скачки напряжения (U).
a) При плавном увеличении I наблюдается скачок U от U1 до U2 при
изменении ϕ |
от ϕ = −90 до ϕ |
2 |
= 90 |
. Это релейный эффект с |
|
1 |
|
|
опрокидыванием фазы, причем U2 > U1.
Напряжение после скачка опережает ток на 900 и явно несинусоидально:
2 |
12.5 |
13 |
13.5 |
14 |
14.5 |
15 |
Рис. 121
При наличии потерь энергии в катушке и ZИ → ∞ также наблюдаются скачки напряжения U.
b)При плавном уменьшении I наблюдается скачок U от U0 до 0. При наличии потерь энергии в катушке и ZИ → ∞ также наблюдаются скачки напряжения U.
|
|
U |
|
U2 |
ZИ → ∞ |
|
c I(U) |
|
|
|
U0 |
b |
|
U1 |
d |
|
|
I |
|
0 |
Iа I0 |
|
|
|
|
Рис. 122 |
Таким образом, |
при ZИ → ∞ невозможно экспериментально получить |
участок db I(U) |
и достигнуть устойчивый феррорезонанс в точке b. |
При питании от источника с ZИ → 0 можно без скачков снять всю ВАХ I(U) и в точке b получить устойчивый феррорезонанс.
|
|
|
|
|
|
|
B |
U |
|
|
|
|
|
|
|
|
|
U2 |
|
c |
ZИ → 0 |
|
|
|
|
|
|
|
|
I(U) |
|
|
|
|
|
|
|
|
U0 |
b |
|
|
|
|
|
|
|
|
|
U1 |
|
d |
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
0 |
Iа |
I0 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 123 |
|
|
I |
a |
|
1 |
|
проводимость, |
характеризующая потери энергии в |
ga ≈ |
|
|
|
|
– |
|
|
|
|
U0 |
|
Ом |
|
|
|
|
|
катушке.
|
|
|
|
|
|
+ j |
ВАХ I(U) с учетом потерь энергии |
|
|
Ia = U ga |
|
|
|
можно рассчитать, изменяя U, по |
IС |
|
|
I |
|
|
|
формуле |
|
|
ϕ < 0 U +1 |
|
|
|
|
|
|
|
|
I (U ) = U 2 g 2 + [I |
L |
(U ) − ωCU ]2 , |
|
|
a |
|
|
|
|
|
|
|
которая следует из векторной |
IL |
|
диаграммы |
|
|
|
|
Рис. 124 |
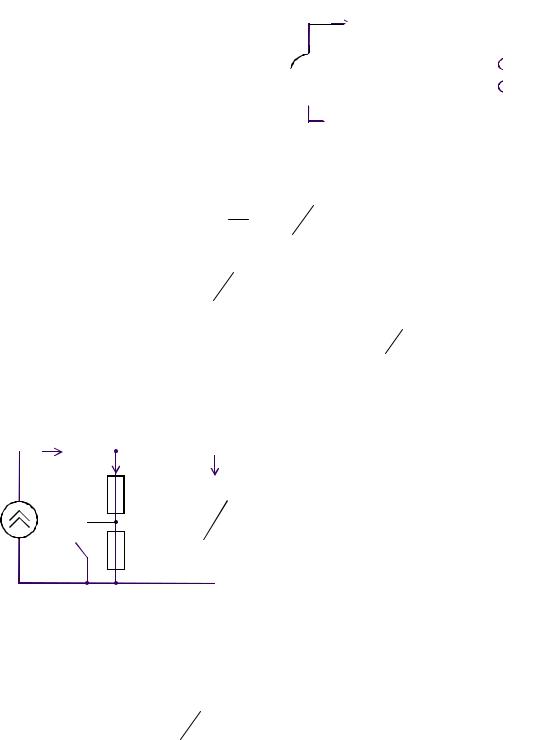
Феррорезонанс токов может применяться:
a)для стабилизации переменного напряжения источника с ZИ → ∞
.
I IH
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
+ |
|
И U |
|
|
|
|
|
|
|
|
|
|
|
U Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
ZИ→∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стабилизатор |
I>>IH
Рис. 125
UU
U2 c
c
U0 b
b
I
U1 d
I
0 Iа I0 I
Рис. 126
Коэффициент стабилизации напряжения
|
KСТ |
= |
( I ) U |
> 1, причём ( I ) / I > ( U ) / U . |
|
I ( U ) |
|
|
|
|
b) для защиты от повышения переменного тока сети.
w1 I СЕТИ
ТТ
Происходит отключение нагрузки при I |
СЕТИ |
≥ I |
0 |
w2 |
, причём |
|
|
|
w1 |
|
|
|
|
|
w1 < w2 – количество витков. |
|
|
|
|
|
Переходные процессы в нелинейных цепях
Расчет переходных процессов имеет ряд особенностей, обусловленных зависимостью параметров нелинейных элементов от величин напряжений и токов.
1.Для нелинейных цепей неприменим метод наложения – классический метод и интеграл Дюамеля нельзя использовать.
2.Нелинейные цепи характеризуются нелинейными дифференциальными уравнениями – операторный метод нельзя использовать.
3.Для расчета переходных процессов в нелинейных цепях используют приближенные методы и численные расчеты на ЭВМ.
Метод условной линеаризации
Дает ориентировочное решение и заключается в условной замене нелинейных элементов линейными элементами.
Напряжения и токи переходного процесса находятся в виде приближенных функций времени классическим или операторным методом. Этот метод наиболее удобно применять для нелинейных цепей с постоянными источниками.
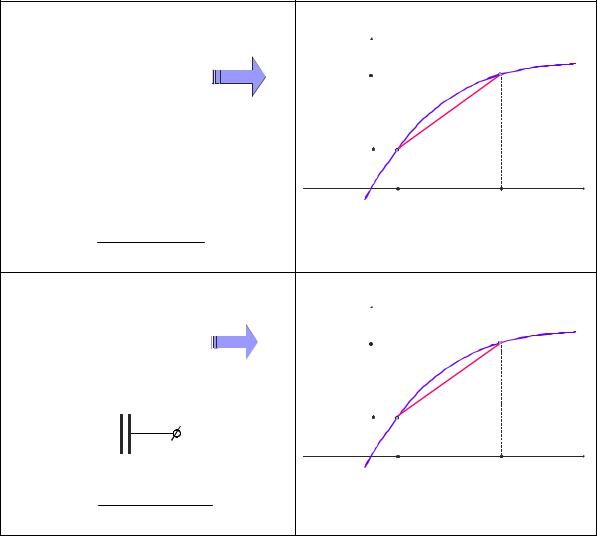
Условимся, что замена нелинейных элементов линейными осуществляется следующим образом:
Резистивный элемент.
u
i +
а 

 в
в
Rн = uуст − u(0+ ) , Ом iуст − i(0+ )
Eн = u(0+ ) − Rн i(0+ ) , В
iуст
i(0+ )
 u 0 u(0+ ) uуст В
u 0 u(0+ ) uуст В
Рис. 128
Индуктивный элемент |
|
|
|
|
|
Вб |
Ψ |
Ψ (iL ) |
|
|
|
|
|
|
|
|
Ψ (0+ ) |
|
|
|
|
Lн |
Ψуст |
|
|
iL |
|
|
|
|
|
|
+ uL |
0 |
iL уст |
iL (0+ ) |
A |
L |
= Ψ уст − Ψ(0+ ) |
, Гн |
Рис. 129 |
|
|
н |
iL уст − iL (0+ ) |
|
|
|
|
|
|
|
|
|
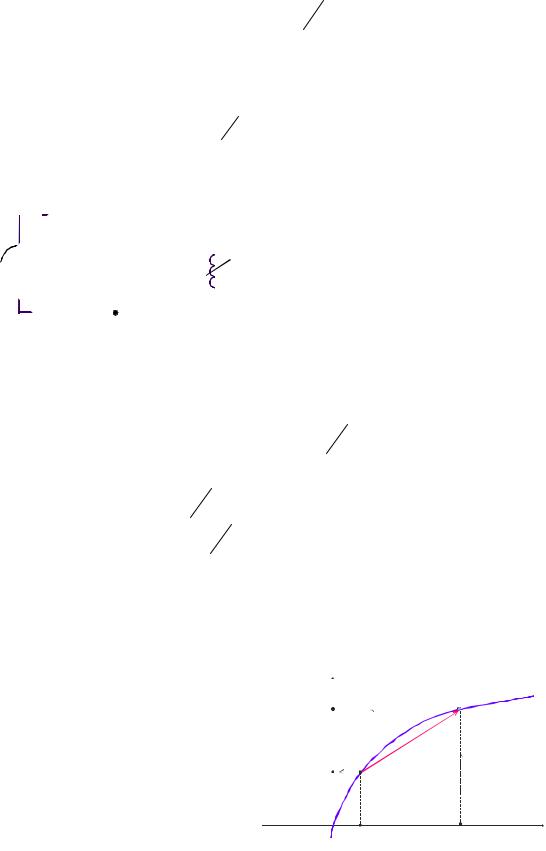
Емкостный элемент |
|
|
|
|
|
Кл |
q |
q(uC ) |
|
|
|
|
|
|
|
|
qуст |
|
|
|
iС |
q(0+ ) |
|
|
|
|
uС |
|
|
|
uС |
|
0 |
uС (0+ ) |
uСуст |
В |
Cн |
qуст − q(0+ ) |
, Ф |
Рис. 130 |
|
|
= |
|
|
|
|
uC уст − uC (0+ ) |
|
|
|
Порядок расчёта переходных процессов методом условной линеаризации с использованием классического метода
1.ННУ. Определяем независимые начальные условия в цепи до коммутации iL (0− ) или uC (0− ) .
2.ЗНУ. Определяем искомую величину при t(0+) – i(0+) или u(0+) .
3.Из расчета установившегося режима после коммутации находим установившиеся значения при t = ∞ – iуст и uуст .
4.Линеаризуем участок характеристики НЭ и определяем его условно линейные параметры.
5.Определяем корень характеристического уравнения p через входное сопротивлениеZ ( p) = 0 , в схеме после коммутации.
6.Определяем постоянную интегрирования из начальных условий
А= i(0+) − iуст (0) или В = u(0+ ) − uуст (0) .
95
7.Записываем окончательное решение
i(t) ≈ iуст + iсв(t) = i(∞) + Ae pt или u(t) ≈ uуст + uсв(t) = u(∞) + Be pt
Пример
|
|
|
|
а |
|
iC |
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
e(t) = const В, |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
E |
|
|
|
u |
С = 100 мкФ, |
|
|
|
uC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i(u) – ВАХ нелинейного элемента. |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
Определить: |
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
i(t) = ? |
|
|
Рис. 131 |
|
|
|
|
|
|
|
|
|
1.ННУ. Определяем независимые начальные условия в цепи до коммутации uC (0− ) = uC (0+ ) = Е .
2.ЗНУ. Определяем искомую величину при t(0+) . i(0+ ) находим графически по i(u) и u(0+ ) = uC (0+ ) = E .
3.Из расчета установившегося режима после коммутации находим
установившиеся значения при t = ∞ – iуст = 0 или u уст = 0 .
4.Линеаризуем участок характеристики НЭ и определяем его условно линейные параметры.
Аi
Rн = uуст − u(0+ ) = ... Ом,
iуст − i(0+ )
Ен = u(0+ ) − Rн i(0+ ) = 0 .
В результате при t > 0 получим схему:
i(u)
i(0+ )


|
|
|
|
u(0 |
|
u |
0 |
+ ) В |
|
|
|
|
|
а |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
Rн |
С |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eн |
|
|
|
uC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
5.Определяем корень характеристического уравнения p через входное сопротивлениеZ ( p) = 0 , в схеме после коммутации.
Z ( p) = R + |
1 |
= 0 , p = − |
1 |
= ... , 1 . |
|
|
н |
pC |
|
RнС |
с |
|
|
|
|
|
6.Определяем постоянную интегрирования из начальных условий
А= i(0+ ) − iуст = ...
7.Записываем окончательное решение
i(t) ≈ i + Ae pt = i(0 |
|
|
|
− t |
+ |
) e RнС А. |
|
уст |
|
|
|
|
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J = const, R = ... Ом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С = 100 мкФ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ(iL ) – ВбАХ нелинейного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
индуктивного элемента. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определить: |
|
Рис. 132 |
|
|
|
|
|
uJ (t) = ? |
1. |
ННУ. Определяем независимые начальные условия в цепи до |
|
коммутации i |
|
(0 |
|
) = i |
|
(0 |
|
) = |
J R |
= J . |
|
L |
− |
L |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R + R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
ЗНУ. |
Определяем |
|
|
искомую |
величину при t(0+) – |
|
i |
R |
(0 |
+ |
) = J − i |
L |
(0 |
+ |
) = J |
2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uJ (0+ ) = R iR (0+ ) = R J 2 .
3.Из расчета установившегося режима после коммутации находим установившиеся значения при t = ∞ –
iL уст = J , uJ уст = 0 . Ψ уст находим графически по Ψ(iL ) и iL уст .
4.Линеаризуем участок характеристики НЭ и определяем его условно линейные параметры.
|
|
Ψ |
уст − Ψ(0+ ) |
Вб |
Ψ |
|
|
|
|
|
|
Lн |
= |
|
|
= ... , . |
Ψуст |
|
Ψ (iL ) |
|
|
|
|
|
iL уст − iL (0+ ) |
|
|
|
|
|
|
|
Ψ (0+ ) |
|
|
В результате при t > 0 получим |
|
|
iL |
|
|
|
схему: |
0 |
iL (0+ ) |
iL уст А |
 Lн
Lн
5.Определяем корень характеристического уравнения p через входное сопротивлениеZ ( p) = 0 , в схеме после коммутации.
Z ( p) = R + рLн = 0 , p = − R = ... , 1с .
Lн
6.Определяем постоянную интегрирования из начальных условий
В= uJ (0+ ) − uJ уст = R J 2 .
7.Записываем окончательное решение
|
|
|
|
|
|
|
|
u (0 ) − u |
|
|
|
|
|
|
R J |
|
− R t |
|
u (t) ≈ u |
|
|
+ |
|
|
|
e pt = |
e |
Lн В. |
|
|
|
|
|
|
|
|
J |
|
|
|
J уст |
|
|
J |
+ |
|
|
|
J |
уст |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iR |
|
|
|
|
|
iС |
|
|
R = ... Ом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J = const, |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
С = 100 мкФ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q(uC ) – КВХ нелинейного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
ёмкостного элемента. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 133 |
|
|
|
|
|
|
|
|
|
|
iR (t) = ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.ННУ. Определяем независимые начальные условия в цепи до коммутации uC (0− ) = uC (0+ ) = J R .
2. ЗНУ. |
|
Определяем |
искомую величину при t(0+) – |
i |
|
(0 |
+ |
) = |
uC (0+ ) |
= J |
, |
R |
|
|
|
|
2R |
2 |
|
|
|
|
|
|
|
|
q(0+ ) находим графически по q(uC ) и uC (0+ ) .
3.Из расчета установившегося режима после коммутации находим установившиеся значения при t = ∞ –
iR уст = J , uС уст = 2R J . qуст находим графически по q(uC ) и
uC уст .
98
4.Линеаризуем участок характеристики НЭ и определяем его условно линейные параметры.
|
|
q |
уст |
− q(0+ ) |
Сн |
= |
|
|
|
= ... Ф. |
|
|
|
|
|
uC уст − uC (0+ ) |
В результате при t > 0 получим схему:
|
Кл |
q |
|
|
|
|
qуст |
|
|
|
|
q(uC ) |
|
|
|
|
|
|
q(0+ ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uC |
0 |
uC (0+ ) |
uCуст B |
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
2R |
Cн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.Определяем корень характеристического уравнения p через входное сопротивлениеZ ( p) = 0 , в схеме после коммутации.
Z ( p) = 2R + |
1 |
= 0 , p = − |
1 |
= ... , 1 |
. |
|
|
|
|
|
рСн |
|
2RCн |
с |
|
|
|
|
|
6.Определяем постоянную интегрирования из начальных условий
A = iR (0+ ) − iR уст = −J 2 .
7.Записываем окончательное решение
|
−t |
|
J |
−t |
|
i R (t) ≈ iR + A e |
2RCн = J − |
e 2RCн А. |
|
|
|
уст |
2 |
|
|
|
|
|
Метод последовательных интервалов
Является приближенным численным методом, заключающимся в замене нелинейных дифференциальных уравнений алгебраическими уравнениями, содержащими конечные приращения исследуемых величин за малые интервалы времени.
а) нелинейные элементы u |
|
= |
|
d Ψ |
≈ |
ΔΨ |
, |
|
|
|
i |
= |
|
dq |
≈ |
|
q |
. |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
t |
|
|
C |
|
|
dt |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) линейные элементы u |
|
= L |
diL |
≈ L |
iL |
, i |
= С |
duC |
≈ C |
|
|
uC |
. |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
t |
C |
|
dt |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ uR |
|
|
|
|
|
|
|
|
|
|
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е = Em sin(ωt + α ) В, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R = ... Ом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С = 100 мкФ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ(iL ) – ВбАХ нелинейного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
индуктивного элемента. |
|
|
|
|
|
|
|
|
|
|
Рис. 134 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iL (t) = ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
По 2 закону Кирхгофа e = uR + uL = R iL |
+ |
d Ψ |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда E |
|
sin(ωt |
|
+ α ) ≈ R i |
(к) + |
ΔΨ(к) |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ΔΨ(к) = [E |
m |
sin(ωt |
к |
+ α ) − R i(к) ] |
t , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
при этом Ψ(к+1) |
= Ψ(к) + ΔΨ(к) , t |
к |
= к |
t , к = 0, 1, 2, 3 ... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Начальные условия |
к = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
(0) = i |
(0) |
|
= 0 |
|
Ψ |
|
(0) = Ψ(0) = 0 , причём |
t << T = |
2π |
|
|
|
|
L |
L |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Расчет удобно вести, заполняя следующую таблицу.
к |
t |
Ψ |
(k ) |
(k ) |
ΔΨ |
(к) |
Ψ |
(k +1) |
(k +1) |
по Ψ(iL ) |
|
к |
|
iL |
|
|
|
|
iL |
– |
c |
Вб |
A |
Вб |
Вб |
|
А |
0 |
0 |
Ψ |
(0) |
(0) |
ΔΨ |
(0) |
Ψ |
(1) |
|
(1) |
|
|
|
iL |
|
|
|
|
iL |
1 |
t |
Ψ |
(1) |
(1) |
ΔΨ |
(1) |
Ψ |
(2) |
|
(2) |
|
|
|
iL |
|
|
|
iL |
2 |
2· t |
Ψ |
(2) |
(2) |
ΔΨ |
(2) |
Ψ |
(3) |
|
(3) |
|
|
|
iL |
|
|
|
|
iL |