

Розділ 2. Кінематика
Кінематика - розділ механіки, в якому вивчається рух матеріальних тіл з геометричної точки зору, без урахування маси та діючих на них сил. Способи завдання руху точки: 1) природний, 2) координатний, 3) векторний. Траєкторія точки - безперервна крива, яку описує точка при своєму русі.
Природний
спосіб.
Вказується траєкторія точки, закон її
руху по цій траєкторії, початок і напрямок
відліку дугової координати:
![]() закон
руху точки. При прямолінійному русі:
закон
руху точки. При прямолінійному русі:
![]()
Координатний
спосіб.
Положення точки в просторі визначається
трьома координатами, зміни яких визначають
закон руху точки:
![]() Якщо
рух у площині, то два рівняння руху.
Рівняння руху описують рівняння
траєкторії в параметричній формі.
Виключивши з рівнянь параметр
t, отримуємо рівняння траєкторії в
звичайному вигляді:
Якщо
рух у площині, то два рівняння руху.
Рівняння руху описують рівняння
траєкторії в параметричній формі.
Виключивши з рівнянь параметр
t, отримуємо рівняння траєкторії в
звичайному вигляді:
![]() (для
площини).
(для
площини).

Векторний
спосіб.
Положення точки визначається її
радіус-вектором
![]() проведеним
з будь-якого центру. Крива, яка викреслюється
кінцем будь-якого вектора, називається
годографом
цього вектора. Тобто траєкторія - годограф
радіус-вектора. Зв'язок між координатним
і векторним способами:
проведеним
з будь-якого центру. Крива, яка викреслюється
кінцем будь-якого вектора, називається
годографом
цього вектора. Тобто траєкторія - годограф
радіус-вектора. Зв'язок між координатним
і векторним способами:
![]() ,
,![]() -
орти одиничні
-
орти одиничні
вектори, спрямовані з будь-якою віссю) модуль
![]() спрямовуючи
косинуси:
спрямовуючи
косинуси:
![]()
 i
т. д.
i
т. д.
Перехід від координатного способу до природного:
Швидкість
точки.
Вектор швидкості:
![]() -
перша похідна від радіус-вектора за
часом (точка позначає похідну за часом);
-
перша похідна від радіус-вектора за
часом (точка позначає похідну за часом);
![]()
Проекції
швидкості:
![]() Модуль
швидкості:
Модуль
швидкості:
![]() ,
спрямовуючи
косинуси:
,
спрямовуючи
косинуси:![]() i
i
т. д. Якщо модуль швидкості не змінюється з плином часу, то рух називається рівномірним.
При
природному способі:
![]() -
модуль швидкості, вектор швидкості:
-
модуль швидкості, вектор швидкості:
![]() ,
,![]() -
орт дотичній, тобтошвидкість
завжди спрямована по
-
орт дотичній, тобтошвидкість
завжди спрямована по
дотичній
до траєкторії.
Якщо
V> 0, то рух відбувається в бік позитивного
відліку дугової координати і навпаки.
Рух в полярній системі координат:
![]() -
полярний радіус, -
-
полярний радіус, -![]() кут.
кут.
Проекції
швидкості на радіальні напрями
![]() поперечний напрямок
поперечний напрямок
![]() модуль швидкості
модуль швидкості
![]()
Прискорення
точки.![]()
![]() Проекції
прискорення:
Проекції
прискорення:
![]() ї
т.д. Модуль прискорення:
ї
т.д. Модуль прискорення:
![]() спрямовуючї
косинуси:
спрямовуючї
косинуси:
![]() и
т.д.
и
т.д.
При
завданні
руху
в полярних
координатах: проекції
прискорення
на радіальний
напрям
![]() поперечний
напрямок
поперечний
напрямок
![]() модуль
прискорення
модуль
прискорення
![]() При
природному способі
завдання
руху
повне
прискорення
розкладають
на нормальне
і дотичне
(тангенціальне)
прискорення:
При
природному способі
завдання
руху
повне
прискорення
розкладають
на нормальне
і дотичне
(тангенціальне)
прискорення:
![]()
Модуль
нормального прискорення:
![]() I
I![]() радіус
кривизни
траєкторії,
нормальне
прискорення
направлено по нормалі
до траєкторії
радіус
кривизни
траєкторії,
нормальне
прискорення
направлено по нормалі
до траєкторії
![]() до
дотичної)
завжди
до
до
дотичної)
завжди
до

ц![]() ентрукривизни
тобто
в бік
увігнутості.
Нормальне
прискорення
характеризує
зміну
V
за напрямком.
ентрукривизни
тобто
в бік
увігнутості.
Нормальне
прискорення
характеризує
зміну
V
за напрямком.
Модуль дотичного прискорення направлено
по
дотичній
до траєкторії,
або
в бік
швидкості,
або
в зворотний.
Дотичне
прискорення
характеризує
зміну
швидкості
по величині.
При прискореному
русі напрямок
дотичного
прискорення
та швидкості
співпадають,
при сповільненому
- протилежні.![]()
![]() .
Вектор прискорення
лежить у суміжній площині, його проекція
на бінормаль дорівнює 0 (головна нормаль
лежить в дотичній площині, тобто в
площині плоскої кривої, бінормаль
-
.
Вектор прискорення
лежить у суміжній площині, його проекція
на бінормаль дорівнює 0 (головна нормаль
лежить в дотичній площині, тобто в
площині плоскої кривої, бінормаль
-![]() до
головної нормалі та дотичної). Окремі
випадки руху точки: 1) прямолінійне:
радіус кривизни
до
головної нормалі та дотичної). Окремі
випадки руху точки: 1) прямолінійне:
радіус кривизни
![]() (
нескінченно
великий)
(
нескінченно
великий)![]() 2)
2)Рівномірний криволінійний рух:
2)
2)Рівномірний криволінійний рух:![]() Прискорення
з'являється тільки за рахунок зміни
напрямку швидкості. Закон руху:
Прискорення
з'являється тільки за рахунок зміни
напрямку швидкості. Закон руху:
![]() при
при
![]()
Рівномірний прямолінійний рух:
 Єдиний
рух, де а=0.
Єдиний
рух, де а=0.Рівномірний криволінійний рух:

 ,
,
При рівноприскореному русі знаки однакові, при рівноуповільненому - різні. Найпростіші рухи твердого тіла: поступальний і обертання навколо нерухомої вісі. Поступальний рух тіла - такий рух твердого тіла, при якому будь-яка пряма, проведена в цьому тілі, при переміщенні, залишається паралельна сама до себе. При поступальному русі всі точки тіла описують однакові траєкторії і мають в кожний момент часу однакові по модулю і напрямку швидкості і прискорення. Обертальний рух тіла - такий рух твердого тіла, при якому всі точки, що належать деякій прямій, незмінно пов'язані з тілом, залишаються нерухомими. Ця пряма називається віссю обертання тіла. При цьому русі всі точки тіла рухаються в площинах, перпендикулярних вісі обертання,
та
описують кола, центри яких лежать на
вісі обертання. Рівняння
(закон) обертального руху:![]() -
кут повороту тіла в радіанах.
-
кут повороту тіла в радіанах.![]()
Кутова
швидкість:
![]() [рад/с]
- визначає швидкість зміни кута повороту.
[рад/с]
- визначає швидкість зміни кута повороту.
Вектор
кутової швидкості тіла, що здійснює
обертання навколо осі, спрямований
вздовж вісі обертання так, що якщо
дивитися йому назустріч обертання буде
проти
год. стрілки, "n" - число обертів за
хв. [об/хв],![]()
![]()
Кутове
прискорення тіла:![]() I
I![]() Вектор
кутового прискорення
Вектор
кутового прискорення
також
спрямований вздовж вісі обертання. При
прискореному русі збігається за напрямом
з кутовою швидкістю і протилежно при
уповільненому обертанні. Окремі
випадки обертання тіла: 1) Рівномірне
обертання:
![]()
2)
Рівномірне обертання:
![]() ;
;
![]() тут
початковий кут
тут
початковий кут
![]()

Швидкості
та прискорення точок обертового тіла.
![]()
![]()
Швидкість
будь-якої точки твердого тіла, обертового
навколо нерухомої вісі, дорівнює
векторному добутку вектора кутової
швидкості тіла на радіус-вектор цієї
точки. Модуль векторного
добутку:![]() -
відстань від
точки М до до вісі обертання. Вектор
швидкості спрямований по дотичній до
кола, по якому переміщюється
точка М, в бік обертання.
-
відстань від
точки М до до вісі обертання. Вектор
швидкості спрямований по дотичній до
кола, по якому переміщюється
точка М, в бік обертання.
Формули
Эйлера:
![]() -
проекції вектора кутової швидкості.
Проекція обертальної (окружної)
швидкості:
-
проекції вектора кутової швидкості.
Проекція обертальної (окружної)
швидкості:![]() Якщо
вісь оберту співпадає з
Якщо
вісь оберту співпадає з
віссю
![]() Прискорення:
Прискорення:
![]() .
Обертальне прискорення
.
Обертальне прискорення![]() модуль
оберт. приск.
модуль
оберт. приск.
![]() спрямований
по дотичній до траєкторії точки, тобто
паралельно швидкості. Доцентрове
(вісіпрагнуюче)
прискорення
спрямований
по дотичній до траєкторії точки, тобто
паралельно швидкості. Доцентрове
(вісіпрагнуюче)
прискорення
![]() ,
,
![]() направлено по радіусу до вісі (центру)
обертання.Модуль повного приск.:
направлено по радіусу до вісі (центру)
обертання.Модуль повного приск.:![]()
Кут,
між векторами повного і вісіпрагнуючого
прискорення:![]()
Плоский рух твердого тіла.
Плоским
(плоскопаралельним) наз. такий рух, при
якому всі його точки перемыщуються
паралельно деякій нерухомій площині.
Рівняння
плоского руху:
![]() точка
А наз. полюсом. Плоский рух тв.тела
складається з поступального руху, при
якому всі точки тіла
точка
А наз. полюсом. Плоский рух тв.тела
складається з поступального руху, при
якому всі точки тіла
рухаються
так само, як полюс (А),і з обертального
руху
навколо цього полюса. Поступальне
переміщення залежить
від вибору полюса, а величина та напрямок
кута поворота
не залежать. Швидкості
точок тіла
при
плоскому
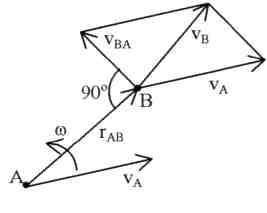
русі:
![]() ;
;![]() ,
,![]() ,
тобто швидкість
якої-небудь точки В плоскої фігури
дорівнює геометричній
сумі швидкості полюса А і швидкості
точки В при обертанні
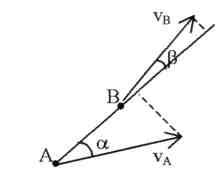
плоскої фігури навколо полюса А. Теорема:
при плоскому русі проекції швидкостей
двох точок тіла на вісь, проходящю через
ці точки,
рівні меж собой:
,
тобто швидкість
якої-небудь точки В плоскої фігури
дорівнює геометричній
сумі швидкості полюса А і швидкості
точки В при обертанні
плоскої фігури навколо полюса А. Теорема:
при плоскому русі проекції швидкостей
двох точок тіла на вісь, проходящю через
ці точки,
рівні меж собой:![]() Миттєвий
центр швидкостей
- точка плоскої фігури, швидкість якої
в даний момент дорівнює нулю - Р. Якщо
тіло рухається непоступально, тобто
Миттєвий
центр швидкостей
- точка плоскої фігури, швидкість якої
в даний момент дорівнює нулю - Р. Якщо
тіло рухається непоступально, тобто
![]() то
м.ц.ш. завжди існує. При поступальномурусі
м.ц.ш. знаходиться в
то
м.ц.ш. завжди існує. При поступальномурусі
м.ц.ш. знаходиться в
![]()
![]() –
швидкість будь-якої
плоскої фігури має модуль, рівний добутку
кутової швидкості фігури
на довжину відрізку, з’єднуючий точку
с м.ц.ш, і направлена
–
швидкість будь-якої
плоскої фігури має модуль, рівний добутку
кутової швидкості фігури
на довжину відрізку, з’єднуючий точку
с м.ц.ш, і направлена
![]() цьому
відрізку в
цьому
відрізку в
бік
обертання фігури.
![]() ,
швидкості точок тіла пропорційні їх
відстаням
,
швидкості точок тіла пропорційні їх
відстаням
 до
м.ц.ш.
до
м.ц.ш.![]() , кутова швидкіть тіла дорівнює відношенню
швидкості
будь-якої точки до її відстані до м.ц.ш.
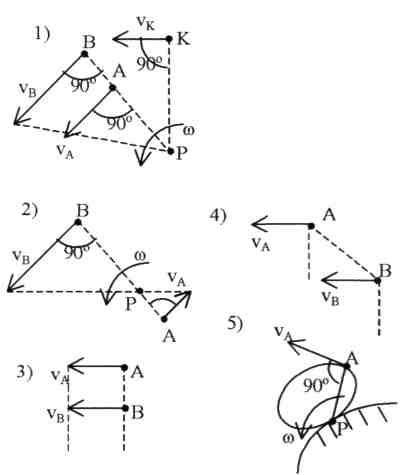
Визначення положення м.ц.щ.:
1) м.ц.ш. – точка перетину перпенди-кулярів,
відновленних до швидкостей точок (напр.
в точці В і точці
К); 2) якщо швидкості точок А і В паралельні
меж собою
і перпендикулярні АВ, то для визначення
м.ц.ш.
повинні бути відомі модулі і напрямки
швидкостей (див.
, кутова швидкіть тіла дорівнює відношенню
швидкості
будь-якої точки до її відстані до м.ц.ш.
Визначення положення м.ц.щ.:
1) м.ц.ш. – точка перетину перпенди-кулярів,
відновленних до швидкостей точок (напр.
в точці В і точці
К); 2) якщо швидкості точок А і В паралельні
меж собою
і перпендикулярні АВ, то для визначення
м.ц.ш.
повинні бути відомі модулі і напрямки
швидкостей (див.![]() і
і
![]() );
3) якщо вони прицьому
рівні між собою, то м.ц.ш. знаходиться в
);
3) якщо вони прицьому
рівні між собою, то м.ц.ш. знаходиться в
![]() а
кутова швидкість
а
кутова швидкість
![]() 4)
якщо відомо,
4)
якщо відомо,
що
швидкості двох точок А і В рівні,
паралельні
і не перпендикулярні АВ, то м.ц.ш. в![]() і
кутова швидкість
і
кутова швидкість
![]() якщо
це має
якщо
це має
місце тільки до деяких моментів часу, то маємо миттєвий поступальний рух; 5) якщо плоска фігура котиться без ковзання по нерухомій поверхні, то м.ц.ш. плоскої фігури буде в точці дотику. Теорема Шаля: плоску фігуру можно перемістити із одного положення в будь-яке інше на площині одним поворотом цієї фігури навколо деякого нерухомого центра. Цей центр на нерухомій площині, співпадає з м.ц.ш.
і називається миттєвим центром обертiв (вісь обертань). При русі плоскої фігури м.ц.ш. безупинно змінює своє положення. Геометричне місце м.ц.ш, відзначених на нерухомій площині, називається нерухомою центроідою. Геометричне місце м.ц.ш, відзначених на площині фігури, наз. рухомою центроідою (колесо котиться по прямій: нерухома центроіда - пряма, рухома - коло). При русі плоскої фігури рухома центроіда котиться без ковзання по нерухомій центроіді (теорема Пуансо).

Прискорення
точок:
![]()
![]() -
прискорення будь-якої точки (В) фігури
геометрично складається з прискорення
полюса (А) та доцентрового і обертального
прискорень під обертальним рухом тіла
відносно полюса.
-
прискорення будь-якої точки (В) фігури
геометрично складається з прискорення
полюса (А) та доцентрового і обертального
прискорень під обертальним рухом тіла
відносно полюса.
![]()
![]() ,
, ,
,![]() .
Миттєвий
центр прискорень - точка (Q) плоскої
фігури, прискорення якої в даний момент
часу дорівнює нулю. Для
його побудови з точки А відкладаємо під
кутом
.
Миттєвий
центр прискорень - точка (Q) плоскої
фігури, прискорення якої в даний момент
часу дорівнює нулю. Для
його побудови з точки А відкладаємо під
кутом
![]() до
прискорення
до
прискорення
![]()
Відрізок
![]() при
цьому кут відкладається від прискорення
в сторону, напрямку кутового прискорення
при
цьому кут відкладається від прискорення
в сторону, напрямку кутового прискорення
![]() .
Модулі прискорень точок плоскої фігури
пропорційні відстані від цих точок до
мит.ц. прискорень, а вектори прискорень
складають з відрізками, що з'єднують ці
точки
.
Модулі прискорень точок плоскої фігури
пропорційні відстані від цих точок до
мит.ц. прискорень, а вектори прискорень
складають з відрізками, що з'єднують ці
точки
і
м.ц.ш. один і той самий кут
![]()
![]() .
Миттєвий центр швидкостей
.
Миттєвий центр швидкостей
Р і миттєвий центр прискорень Q є різними точками плоскої фігури. Сферичний рух твердого тіла.

Сферичний
рух -
рух твердого тіла, одна з точок якого у
весь час руху залишається нерухомою
(напр. рух вовчка). Точки тіла рухаються
по сферичних поверхнях. Положення тіла
визначають за допомогою трьох кутів.
Для цього задаються дві системи координат:
нерухома Oxyz і рухома![]() пов'язана
з твердим тілом. Лінія OJ - лінія вузлів,
задаються кути:
пов'язана
з твердим тілом. Лінія OJ - лінія вузлів,
задаються кути:![]() -
кут прецесії,
-
кут прецесії,![]() -
кут нутації,
-
кут нутації,![]() -
кут власного обертання - кути Ейлера.
Таким чином, рівняння сферичного руху:
-
кут власного обертання - кути Ейлера.
Таким чином, рівняння сферичного руху:![]() Кути
відлічується від осей проти ходу час.стр.
Теорема
Ейлера-Даламбера:
кожне переміщення тіла, яке має нерухому
точку, можна замінити одним поворотом
навколо деякої миттєвої осі обертання,
що проходить через цю точку. Швидкості
всіх
Кути
відлічується від осей проти ходу час.стр.
Теорема
Ейлера-Даламбера:
кожне переміщення тіла, яке має нерухому
точку, можна замінити одним поворотом
навколо деякої миттєвої осі обертання,
що проходить через цю точку. Швидкості
всіх

т![]() очок
тіла, що лежать на миттєвій осі обертання
в даний момент часу дорівнюють нулю.
Вектор кутової швидкості (миттєвої
кутової швидкості) відкладається від
нерухомої точки за миттєвою віссю в
таку сторону, щоб, дивлячись назустріч
цьому вектору, бачити обертання, що
відбувається проти год.стр. Вектор
кутової швидкості з часом змінюється
не тільки за чисельної величини, але і
за напрямком. Кінець вектора описує
годограф
очок
тіла, що лежать на миттєвій осі обертання
в даний момент часу дорівнюють нулю.
Вектор кутової швидкості (миттєвої
кутової швидкості) відкладається від
нерухомої точки за миттєвою віссю в
таку сторону, щоб, дивлячись назустріч
цьому вектору, бачити обертання, що
відбувається проти год.стр. Вектор
кутової швидкості з часом змінюється
не тільки за чисельної величини, але і
за напрямком. Кінець вектора описує
годограф
швидкості
вектора
![]() .
Кутове прискорення:
-
швидкість
.
Кутове прискорення:
-
швидкість
кінця
вектора
![]() ,
збігається за напрямком з дотичною до
годографу вектора кутової швидкості.
У випадку сферич. Руху, на відміну від
випадку обертання навколо нерухомої
осі вектор
,
збігається за напрямком з дотичною до
годографу вектора кутової швидкості.
У випадку сферич. Руху, на відміну від
випадку обертання навколо нерухомої
осі вектор![]() не
співпадає з напрямком
не
співпадає з напрямком![]() .
Швидкості точок при сферич. русі.:
.
Швидкості точок при сферич. русі.:
![]() - векторний добуток,
- векторний добуток,
![]() -
радіус-вектор точки, проведений з
нерухомої точки, модуль
-
радіус-вектор точки, проведений з
нерухомої точки, модуль![]() h-
відстань від точки до миттєвої осі
обертання. Формули Ейлера:
h-
відстань від точки до миттєвої осі
обертання. Формули Ейлера:

![]() ,
обертальне прискорення
,
обертальне прискорення
![]()
модуль
об. приск.
![]() відстань
від точки до вектора
відстань
від точки до вектора
![]() направлено
направлено
![]() но
площині, що проходить через точку М і
вектор
но
площині, що проходить через точку М і
вектор
![]() Вісепрагнуюче
прискорення
Вісепрагнуюче
прискорення![]() ,
,![]()
направлено до осі обертання.
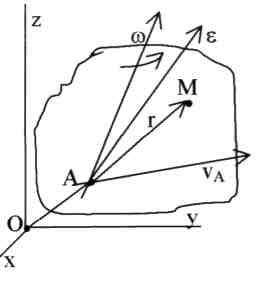
Рух
вільного тв.тіла (загальний випадок
руху).
Вільне тв.тіло має шість ступенів
свободи. При розгляді руху віл.тв.тіла,
крім нерухомої системи координат Oxyz,
вводиться рухома система координат
![]() яка
пов'язана з тілом в точці А. Тоді руху.
св.тв.тела являє собою складний рух,
який можна розглядати як складається
з поступального руху разом з полюсом
(А) та сферіч. руху. навколо полюса. Рів-я
руху віл.тв.тіла:
яка
пов'язана з тілом в точці А. Тоді руху.
св.тв.тела являє собою складний рух,
який можна розглядати як складається
з поступального руху разом з полюсом
(А) та сферіч. руху. навколо полюса. Рів-я
руху віл.тв.тіла:![]()
(кути
Эйлера).
Перші три рів-я визначають поступальну
частина руху. і залежать від вибору
полюса, інші три визначають сферич.
руху. навколо полюса і від вибору полюса
не залежать. Швидкість будь-якої точки
віл.тв.тіла = геометричній сумі швидкості
полюса і швидкості цієї точки в її
сферичному русі навколо полюса.![]()
Прискорення точки віл.тв.тіла = геометричній сумі прискорення полюса, вісепрагнуючого прискорення точки та її обертального прискорення, визначених щодо миттєвої осі і осі кутового прискорення, що проходять через полюс.
![]() ,
два останніх члена дають прискорення
точки в її русі навколо полюса.
,
два останніх члена дають прискорення
точки в її русі навколо полюса.
Складний
рух точки (тіла)
- такий рух, при якому точка (тіло)
одночасно бере участь у кількох рухах
(наприклад, пасажир, що переміщуються
рухомим вагоном). У цьому випадку
вводиться рухома система координат
(Oxyz), яка здійснює певний рух щодо
нерухомої (основної) системи координат![]() Абсолютним
рухом точки наз. рух- по відношенню до
нерухомої системі координат. Відносний
рух - рух по відношенню до рухомого
системи координат (рух по вагону).
Переносний рух - рух рухомої сист.
координат щодо нерухомої (рух вагона).
Теорема про складання швидкостей:
Абсолютним
рухом точки наз. рух- по відношенню до
нерухомої системі координат. Відносний
рух - рух по відношенню до рухомого
системи координат (рух по вагону).
Переносний рух - рух рухомої сист.
координат щодо нерухомої (рух вагона).
Теорема про складання швидкостей:![]()

![]()
- орти
(одиничні
вектора) рухомої системи координат, орт
обертається навколо миттєвої осі, тому
швидкість його кінця
![]()
і
т.д.,![]()
![]() -
відносна
швидкість.
-
відносна
швидкість.
![]() ;
переносна
швидкість:
;
переносна
швидкість:![]() тому
абсолютна
тому
абсолютна
швидкість
точки = геометричній сумі її переносной
![]() і
відносной
і
відносной![]()
швидкостей
![]() ,
модуль:
,
модуль:
![]() .
Теорема
про складання
.
Теорема
про складання
прискореннь
(теорема Коріоліса):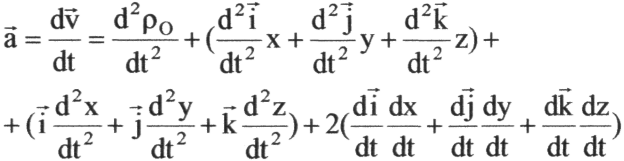
![]() і
т.д.
Складові
виразу,
що
визначає
прискорення
і
т.д.
Складові
виразу,
що
визначає
прискорення
![]() :
1)
:
1)![]() -
прискорення
полюса
О;
-
прискорення
полюса
О;
2)
3) -
відносне
прискорення точки;
-
відносне
прискорення точки;
4)![]() отримуємо
:
отримуємо
:![]()
Перші
три складових представляють собою
прискорення точки в переносному русі:
![]() прискорення
полюса О;
прискорення
полюса О;![]() -
обертальне приск.,
-
обертальне приск.,![]() -
-
вісепрагнуюче
приск., тобто
![]() .
Теорема
про складання прискорень (теорема
Коріоліса):
.
Теорема
про складання прискорень (теорема
Коріоліса):
![]() ,
где
,
где
![]() - прискорення Коріоліса (коріолісове
прискорення) - у випадку непоступательного
переносного руху абсолютне прискорення
= геометричній сумі переносного,
відносного і коріолісова прискорень.
Коріолісово прискорення характеризує:
1) зміна модуля та напрямку переносной
швидкості точки із-за її відносного
руху; 2) зміна напрямку відносної швидкості
точки із-за обертального переносного
руху. Модуль прискорення Коріоліса:
- прискорення Коріоліса (коріолісове
прискорення) - у випадку непоступательного
переносного руху абсолютне прискорення
= геометричній сумі переносного,
відносного і коріолісова прискорень.
Коріолісово прискорення характеризує:
1) зміна модуля та напрямку переносной
швидкості точки із-за її відносного
руху; 2) зміна напрямку відносної швидкості
точки із-за обертального переносного
руху. Модуль прискорення Коріоліса:
![]() ,
напрямок вектора
,
напрямок вектора
![]()
 визначається
за правилом векторного добутку, або за
правилом Жуковського: проекцію відносної
швидкості на площину, перпендикулярну
переносній кутовий швидкості, треба
повернути на
визначається
за правилом векторного добутку, або за
правилом Жуковського: проекцію відносної
швидкості на площину, перпендикулярну
переносній кутовий швидкості, треба
повернути на
![]() в
напрямку обертання. Коріолісове приск.
= 0 у трьох випадках:
1)
в
напрямку обертання. Коріолісове приск.
= 0 у трьох випадках:
1)![]() тобто
у випадку поступального переносного
руху або в момент звернення кут. швидкості
в
0; 2)
тобто
у випадку поступального переносного
руху або в момент звернення кут. швидкості
в
0; 2)![]() тобто
тобто![]() коли
відносна швидкість
коли
відносна швидкість
![]() параллельна
осі
параллельна
осі
переносного
обертання. У разі руху в одній площині-кут
між
![]() та
вектором
та
вектором![]()
Складний рух твердого тіла При складанні двох поступальних рухів результуючий рух також є поступальним і швидкість результуючого руху дорівнює сумі швидкостей складових рухів. Складання обертань тв. тіла навколо пересічних осей. Вісь обертання, положення якої в просторі змінюється з часом наз. миттєвою віссю обертання тіла. Вектор кутової швидкості - ковзний вектор, спрямований вздовж
м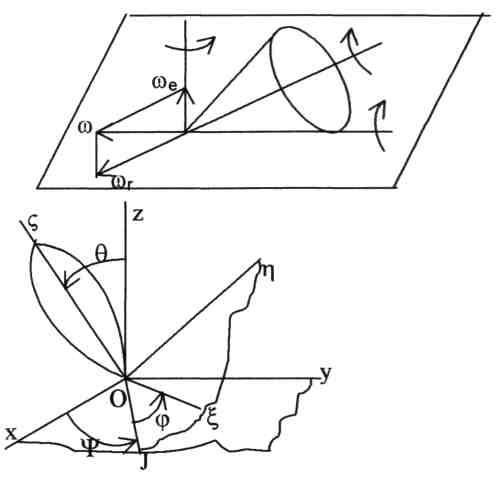 иттєвої
осі обертання. Абсолютна кутова швидкість
тіла = геометричній сумі швидкостей
складових обертань - правило паралелограма
кутових швидкостей.
иттєвої
осі обертання. Абсолютна кутова швидкість
тіла = геометричній сумі швидкостей
складових обертань - правило паралелограма
кутових швидкостей.
![]() Якщо
тіло бере участь одночасно в миттєвих
обертань навколо декількох осей,
пересічних в одній точці, то
Якщо
тіло бере участь одночасно в миттєвих
обертань навколо декількох осей,
пересічних в одній точці, то
![]()
![]() При
сферичному русі твердого тіла, одна з
точок якого у весь час руху залишається
нерухомої, маємо рівняння сферичного
руху:
При
сферичному русі твердого тіла, одна з
точок якого у весь час руху залишається
нерухомої, маємо рівняння сферичного
руху:
![]() -
кут
прецессіі,
-
кут
прецессіі,
![]() -
кут
нутаціі,
-
кут
нутаціі,![]() -
кут власного обертання - кути Ейлера.
Кутова швидкість прецессіі
кут. Швид-кість нутаціі
-
кут власного обертання - кути Ейлера.
Кутова швидкість прецессіі
кут. Швид-кість нутаціі
![]() кут.
швид. власного обертання
кут.
швид. власного обертання
![]()
![]() -
модуль кутової швидкості тіла навколо
миттєвої
-
модуль кутової швидкості тіла навколо
миттєвої
осі. Через проекції на нерухомі осі координат:
![]()
- кінематичні рівняння Ейлера. Складання обертань навколо 2-х паралельних осей.
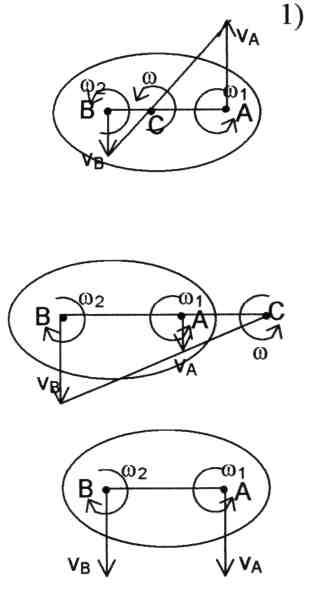 Обертання
спрямовані в одну сторону.
Обертання
спрямовані в одну сторону.![]() - миттєвий центр швидкостей і через неї
проходить миттєва вісь
- миттєвий центр швидкостей і через неї
проходить миттєва вісь
обертання,
![]() 2)
Обертання спрямовані в різні сторони.
2)
Обертання спрямовані в різні сторони.
![]()
С
- м.ц.ш. и мит. вісь обиртання,
![]() Вектори
Вектори
к![]() утових
швидкостей при обертанні навколо
утових
швидкостей при обертанні навколо![]() -их
осей складаються так само, як вектори
паралельних сил. 3) Пара обиртань -
обертання навколо
-их
осей складаються так само, як вектори
паралельних сил. 3) Пара обиртань -
обертання навколо![]() –их
осей спрямованих в різні сторони і
кутові швидкості по модулю рівні
(
–их
осей спрямованих в різні сторони і
кутові швидкості по модулю рівні
(![]() -пара
кутових швидкостей). У цьому випадку
-пара
кутових швидкостей). У цьому випадку
![]() результуючий
рух тіла - поступальний (або миттєво
поступальний) рух зі швидкістю
результуючий
рух тіла - поступальний (або миттєво
поступальний) рух зі швидкістю
![]() - момент пари кутових швидкостей
(поступальний рух педалі велосипеда
щодо рами). М.ц.ш знаходиться в
нескінченності.Складання
поступального і обертального рухів.
1) Швидкість поступального руху
- момент пари кутових швидкостей
(поступальний рух педалі велосипеда
щодо рами). М.ц.ш знаходиться в
нескінченності.Складання
поступального і обертального рухів.
1) Швидкість поступального руху
![]() до
осі обертання - плоскопаралельний рух
- швидке обертання навколо осі Рр з
кутовою швидкістю
до
осі обертання - плоскопаралельний рух
- швидке обертання навколо осі Рр з
кутовою швидкістю
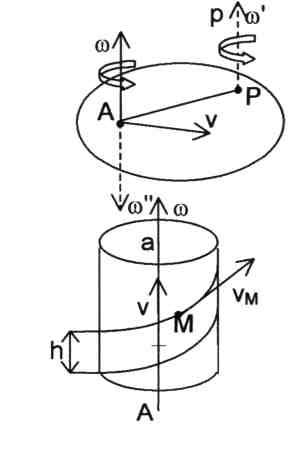
![]() 2)
Гвинтовий
рух - рух тіла складається з обертового
руху навколо осі Аа з кут.швид.
2)
Гвинтовий
рух - рух тіла складається з обертового
руху навколо осі Аа з кут.швид.
![]() і поступального зі швидкістю
і поступального зі швидкістю
![]() Вісь
Аа - ось гвинта. Якщо
Вісь
Аа - ось гвинта. Якщо
![]() та
та
![]() в
одну сторону, то гвинт - правий, якщо в
різні - лівий. Відстань, пройдена за час
одного оберту будь-якою точкою тіла, що
лежить на осі гвинта, наз. кроком гвинта
-
в
одну сторону, то гвинт - правий, якщо в
різні - лівий. Відстань, пройдена за час
одного оберту будь-якою точкою тіла, що
лежить на осі гвинта, наз. кроком гвинта
-![]() Якщо
Якщо![]() та
та
![]() постійні,
то
при
постійному кроці будь-яка
постійні,
то
при
постійному кроці будь-яка
![]() М,
що належить на осі гвинта описує гвинтову
лінію.
М,
що належить на осі гвинта описує гвинтову
лінію.
![]() направлена
по дотичній до гвинтової лінії.
направлена
по дотичній до гвинтової лінії.
3) Швидкість поступального руху утворює довільний кут з віссю обертання, в цьому випадку рух можна розглядати як складові з серії миттєвих гвинтових рухів, навколо безперервно змінюючихся гвинтових осей - миттєво-гвинтовий рух.