

Динаміка матеріальної системи
Матеріальна
система -
сукупність матеріальних точок, рух яких
взаємопов’язаний. Маса системи = сумі
мас всіх точок (або тіл), утворюючих
систему:
![]() Центр
мас
(центр інерції) – геометрична точка,
радіус–вектор
Центр
мас
(центр інерції) – геометрична точка,
радіус–вектор
![]() ,
який визначається рівністю:
,
який визначається рівністю:![]() ,
де
,
де![]() - радіус-вектори точок, утворюючих
систему. Координати центру мас
- радіус-вектори точок, утворюючих
систему. Координати центру мас![]() і так далі.Зовнішні
сили
і так далі.Зовнішні
сили
![]() - сили, діючі на точки системи з сторони
тіл, невходячих в систему.Внутрішні
сили
- сили, діючі на точки системи з сторони
тіл, невходячих в систему.Внутрішні
сили
![]() - сили, викликані взаємодією точок,
входячих в систему. Властивості внутрішніх
сил: 1.Геометрична сума (головний вектор)
всіх внутрішніх сил = 0; 2.Геометрична
сума моментів всіх внутрішніх сил
відносно довільної точки = 0.Диференційне
рівняння руху системи матеріальних
точок:
- сили, викликані взаємодією точок,
входячих в систему. Властивості внутрішніх
сил: 1.Геометрична сума (головний вектор)
всіх внутрішніх сил = 0; 2.Геометрична
сума моментів всіх внутрішніх сил
відносно довільної точки = 0.Диференційне
рівняння руху системи матеріальних
точок:
![]() або в проекціях на осі координат:
або в проекціях на осі координат:![]() і так далі для кожної точки (тіла) системи.Геометрія
мас.
і так далі для кожної точки (тіла) системи.Геометрія
мас.
Момент
інерції матеріальної точки
відносно деякої осі називається добуток
маси m цієї точки на квадрат відстані
цієї точки h до осі: mh2.
Момент
інерції тіла (системи) відносно
осі
![]() .
При безперервному розподіленні мас
(тіл) сума переходить в інтеграл:
.
При безперервному розподіленні мас
(тіл) сума переходить в інтеграл:![]() відносно координатних осей.
відносно координатних осей.![]() ρm
–
радіус інерції тіла – відстань від осі
до точки, в котрій потрібно зосередити
m всього тіла, щоб його момент інерції
дорівнював моменту інерції тіла. Момент
інерції відносно осі (осьовий момент
інерції) завжди >0.Полярний момент
інерції
ρm
–
радіус інерції тіла – відстань від осі
до точки, в котрій потрібно зосередити
m всього тіла, щоб його момент інерції
дорівнював моменту інерції тіла. Момент
інерції відносно осі (осьовий момент
інерції) завжди >0.Полярний момент
інерції
![]() .
.
Центробіжний
момент інерції Jxy
для
матеріальної точки називається добуток
її координат x і y на її масу m. Для тіла
центробіжними моментами інерції
називаються величини, які визначаються
рівностями:
![]() Центробіжні моменти інерції симетричні
відносно своїх індексів, тобто
Центробіжні моменти інерції симетричні
відносно своїх індексів, тобто![]() і т.д. На відміну від осьових, центробіжні
моменти інерції можуть мати любі знаки
та обертатися в нуль.Головною
віссю інерції тіла називається
вісь, для якої обидва центробіжних
моменти інерції, які містять індекс
цієї осі, дорівнюють нулю. Наприклад,
якщо
і т.д. На відміну від осьових, центробіжні
моменти інерції можуть мати любі знаки
та обертатися в нуль.Головною
віссю інерції тіла називається
вісь, для якої обидва центробіжних
моменти інерції, які містять індекс
цієї осі, дорівнюють нулю. Наприклад,
якщо
![]() - головна вісь інерції.Головною
центральною
віссю інерції називається
головна вісь інерції, яка проходить
через центр мас тіла. 1.Якщо тіло має
площину симетрії то люба вісь,
перпендикулярна до цієї площини, буде
головною віссю інерції тіла для точки,
в якій вісь перетинає площину. 2. Якщо
тіло має вісь симетрії,то ця вісь
являється головною віссю інерції тіла
( вісь динамічної симетрії). Розмірність
всіх моментів інерції (кгм2
).
- головна вісь інерції.Головною
центральною
віссю інерції називається
головна вісь інерції, яка проходить
через центр мас тіла. 1.Якщо тіло має
площину симетрії то люба вісь,
перпендикулярна до цієї площини, буде
головною віссю інерції тіла для точки,
в якій вісь перетинає площину. 2. Якщо
тіло має вісь симетрії,то ця вісь
являється головною віссю інерції тіла
( вісь динамічної симетрії). Розмірність
всіх моментів інерції (кгм2
).
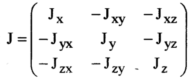
Центр обіжний момент інерції залежить не тільки від напрямків координатних осей, але й від вибору початкових координат.
Тензор інерції в даній точці:
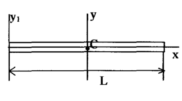
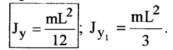
Моменти
інерції деяких однорідних тіл: стержень
мас m і довжини L
 Однорідний суцільний диск з центром
в точці С радіусу R і маси m:
Однорідний суцільний диск з центром
в точці С радіусу R і маси m:![]() Повний
циліндр
Повний
циліндр![]() циліндр з масою розподіленою по ободу
(обруч):
циліндр з масою розподіленою по ободу
(обруч):![]()
Т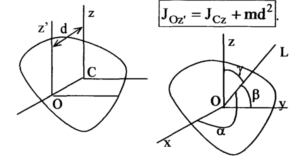 еорема
Гюйгенса-Штейнера момент інерції тіла
відносно довільної осі дорівнює моменту
інерції відносно осі їй паралельній
та про ходячій через центр мас тіла плюс
добуток маси тіла на квадрат відстані
між осями:
еорема
Гюйгенса-Штейнера момент інерції тіла
відносно довільної осі дорівнює моменту
інерції відносно осі їй паралельній
та про ходячій через центр мас тіла плюс
добуток маси тіла на квадрат відстані
між осями:
Найменший момент інерції буде відносно тієї осі, яка проходить через центр мас. Момент інерції відносно довільної осі L:
![]()
![]() якщо
координати осі являються головними
відносно свого початку, то :
якщо
координати осі являються головними
відносно свого початку, то :
![]() Теорема
про
рух центра мас системи. Добуток
маси системи на прискорення її центра
мас дорівнює геометричній сумі всіх
діючих на систему зовнішніх сил
Теорема
про
рух центра мас системи. Добуток
маси системи на прискорення її центра
мас дорівнює геометричній сумі всіх
діючих на систему зовнішніх сил
![]() диференційне рівняння руху центра мас.
В проекціях на осі координат:
диференційне рівняння руху центра мас.
В проекціях на осі координат:![]() Закон
збереження руху центра мас. Якщо
головний вектор (векторна сума) зовнішніх
сил залишається весь час рівним нулю,
то центр мас механічної системи
знаходиться в спокої або рухається
прямолінійно та рівномірно. Аналогічно
в проекціях на осі, якщо
Закон
збереження руху центра мас. Якщо
головний вектор (векторна сума) зовнішніх
сил залишається весь час рівним нулю,
то центр мас механічної системи
знаходиться в спокої або рухається
прямолінійно та рівномірно. Аналогічно
в проекціях на осі, якщо
![]() якщо при цьому в початковий момент
якщо при цьому в початковий момент![]()
Кількість
руху системи Q (іноді
позначають К) – вектор, рівний геометричній
сумі (головному вектору) кількостей
руху всіх точок системи:
![]() М - маса всієї системи VС
– швидкість центра мас.
М - маса всієї системи VС
– швидкість центра мас.
Теорема
про зміну кількості руху системи:
 - похідна по часу від кількості руху
механічної системи геометрично дорівнює
головному вектору зовнішніх сил, діючих
на цю систему. В проекціях:
- похідна по часу від кількості руху
механічної системи геометрично дорівнює
головному вектору зовнішніх сил, діючих
на цю систему. В проекціях:![]() і т.д. Теорема про зміну кількості руху
системи в інтегральній формі:
і т.д. Теорема про зміну кількості руху
системи в інтегральній формі: -імпульс
зовнішніх сил.
-імпульс
зовнішніх сил.
В
проекціях
![]() і т. д. кількість руху системи за деякий
проміжок часу дорівнює сумі імпульсів
діючих на систему зовнішніх сил за той
же проміжок часу.Закон
збереження кількості руху –
якщо сума всіх зовнішніх сил, діючих на
систему, = 0, то вектор кількості руху
системи буде постійним по модулю та
напрямку:
і т. д. кількість руху системи за деякий
проміжок часу дорівнює сумі імпульсів
діючих на систему зовнішніх сил за той
же проміжок часу.Закон
збереження кількості руху –
якщо сума всіх зовнішніх сил, діючих на
систему, = 0, то вектор кількості руху
системи буде постійним по модулю та
напрямку:
![]() аналогічно в проекціях:
аналогічно в проекціях:![]() З закону витікає, що внутрішні сили
змінити сумарну кількість руху системи
не можуть.Тіло
змінної
маси, маса
якого безперервно змінюється з часом
З закону витікає, що внутрішні сили
змінити сумарну кількість руху системи
не можуть.Тіло
змінної
маси, маса
якого безперервно змінюється з часом
![]() (пр.: ракета, паливо якої зменшується).
Диференційне рівняння руху точки змінної
маси:
(пр.: ракета, паливо якої зменшується).
Диференційне рівняння руху точки змінної
маси:![]() -рівняння
Мещерського ,
u – відносна швидкість віддаляючихся
частин.
-рівняння
Мещерського ,
u – відносна швидкість віддаляючихся
частин.
![]() секундні витрати палива,
секундні витрати палива,![]() Реактивна сила направлена в протилежну
сторону відносно швидкості витрати
палива.
Реактивна сила направлена в протилежну
сторону відносно швидкості витрати
палива.
Формула
Циолковського
 - визначає швидкість ракети, коли все
паливо буде витрачено – швидкість в
кінці активної ділянки mт
– маса палива, mk
- маса корпусу ракети, v0
– початкова швидкість.
- визначає швидкість ракети, коли все
паливо буде витрачено – швидкість в
кінці активної ділянки mт
– маса палива, mk
- маса корпусу ракети, v0
– початкова швидкість.
![]() - число Циолковського, m0
–
стартова маса ракети. Від режиму роботи
ракетного двигуна, тобто від того,
наскільки швидко спалюється паливо,
швидкість ракети в кінці періоду горіння
не залежить. Для досягнення першої
космічної швидкості 7,9 км/с при
- число Циолковського, m0
–
стартова маса ракети. Від режиму роботи
ракетного двигуна, тобто від того,
наскільки швидко спалюється паливо,
швидкість ракети в кінці періоду горіння
не залежить. Для досягнення першої
космічної швидкості 7,9 км/с при
![]() швидкість відкиду повинна бути 6 км/с,
що складно здійснити тому використовуються
складені (багатоступінчасті) ракети.
швидкість відкиду повинна бути 6 км/с,
що складно здійснити тому використовуються
складені (багатоступінчасті) ракети.
Головний
момент кількості руху матеріальної
системи (кінетичний момент)
![]() величина, рівна геометричній сумі
моментів кількостей руху всіх точок
системи відносно центра О.
величина, рівна геометричній сумі
моментів кількостей руху всіх точок
системи відносно центра О.![]() .Теорема
про зміну моменту кількості руху системи
(теорема про змінення кінетичного
моменту):
.Теорема
про зміну моменту кількості руху системи
(теорема про змінення кінетичного
моменту):
![]() - похідна по часу від кінетичного моменту
механічної системи відносно деякого
нерухомого центра геометрично дорівнює
головному моменту зовнішніх сил, діючих
на цю систему відносно того ж центру.
Аналогічні рівності відносно осей
координат:
- похідна по часу від кінетичного моменту
механічної системи відносно деякого
нерухомого центра геометрично дорівнює
головному моменту зовнішніх сил, діючих
на цю систему відносно того ж центру.
Аналогічні рівності відносно осей
координат:![]() і т.д.
і т.д.
Закон збереження кінетичного моменту: якщо
![]() Головний
момент кількості руху системи є
характеристикою обертального руху.
Кінетичний момент обертального тіла
відносно осі обертання дорівнює добутку
момента інерції тіла відносно цієї осі
на кутову швидкість тіла:
Головний
момент кількості руху системи є
характеристикою обертального руху.
Кінетичний момент обертального тіла
відносно осі обертання дорівнює добутку
момента інерції тіла відносно цієї осі
на кутову швидкість тіла:
![]() .
Якщо
.
Якщо![]() момент
інерції тіла.
момент
інерції тіла.
Кінетична
енергія системи
- скалярна величина Т, рівна арифметичній
сумі кінетичної енергії всіх точок
системи:
![]() Якщо
система складається з декількох тіл,
то
Якщо
система складається з декількох тіл,
то![]() .
Поступальний рух:
.
Поступальний рух:![]() .
Обертальний рух:
.
Обертальний рух:![]() момент інерції відносно осі обертання.
Плоско паралельний (плоске) рух
момент інерції відносно осі обертання.
Плоско паралельний (плоске) рух![]() швидкість
центра мас. Загальний випадок:
швидкість
центра мас. Загальний випадок:![]() момент інерції тіла відносно миттєвої
осі. Теорема Кеніга:
момент інерції тіла відносно миттєвої
осі. Теорема Кеніга:![]() кінетична енергія механічної системи
= сумі кінетичної енергії центра мас
системи, маса якого дорівнює масі всієї
системи, і кінетичної енергії цієї
системи у її відносному русі відносно
центра мас. Робота сили:
кінетична енергія механічної системи
= сумі кінетичної енергії центра мас
системи, маса якого дорівнює масі всієї
системи, і кінетичної енергії цієї
системи у її відносному русі відносно
центра мас. Робота сили: .
Потужність:
.
Потужність:![]() Теорема про зміну кінетичної енергії
системи а диференційній формі:
Теорема про зміну кінетичної енергії
системи а диференційній формі:![]() - елементарні роботи, діючих на точку
зовнішніх та внутрішніх сил, в кінцевій
формі:
- елементарні роботи, діючих на точку
зовнішніх та внутрішніх сил, в кінцевій
формі:![]() .
Для незмінної системи
.
Для незмінної системи![]() тобто зміна кінетичної енергії твердого
тіла на деякому переміщенні дорівнює
сумі робот зовнішніх сил, діючих на тіло
на цьому переміщенні. Якщо сума робіт
реакції зв’язків на будь якому можливому
переміщенні системи дорівнює нулю, то
такі зв’язки називаються ідеальними.
Коефіцієнт корисної дії (ккд)
тобто зміна кінетичної енергії твердого
тіла на деякому переміщенні дорівнює
сумі робот зовнішніх сил, діючих на тіло
на цьому переміщенні. Якщо сума робіт
реакції зв’язків на будь якому можливому
переміщенні системи дорівнює нулю, то
такі зв’язки називаються ідеальними.
Коефіцієнт корисної дії (ккд) робота корисних сил опору (сил, для яких
призначена машина),
робота корисних сил опору (сил, для яких
призначена машина),![]() витрачена
робота,
витрачена
робота,![]() робота шкідливих сил опору (сили тертя,
опір повітря і т.п.).
робота шкідливих сил опору (сили тертя,
опір повітря і т.п.).![]() корисна
потужність машини,
корисна
потужність машини,![]() потужність двигуна, приводячого її в
рух.Закон
збереження повної механічної енергії:
потужність двигуна, приводячого її в
рух.Закон
збереження повної механічної енергії:
![]() Якщо система рухається під дією
потенційних сил, то сума кінетичної і
потенційної енергії зберігає постійне
значення. ( Т + П – інтеграл енергії).
Потенційні сили – сили, робота яких не
залежить від виду траєкторії за якою
переміщується точка ( пр.: сила тяжіння,
сила пружності) Не потенційні – наприклад:
сили тертя. Механічна енергія - сума
кінетичної та потенційної енергії.
Витрати механічної енергії зазвичай
означають перетворення її в теплоту,
електроенергію,звук або світло, а приток
механічної енергії пов'язаний з оберненим
процесом перетворення різних видів
енергії в механічну енергію.
Якщо система рухається під дією
потенційних сил, то сума кінетичної і
потенційної енергії зберігає постійне
значення. ( Т + П – інтеграл енергії).
Потенційні сили – сили, робота яких не
залежить від виду траєкторії за якою
переміщується точка ( пр.: сила тяжіння,
сила пружності) Не потенційні – наприклад:
сили тертя. Механічна енергія - сума
кінетичної та потенційної енергії.
Витрати механічної енергії зазвичай
означають перетворення її в теплоту,
електроенергію,звук або світло, а приток
механічної енергії пов'язаний з оберненим
процесом перетворення різних видів
енергії в механічну енергію.