

2.10.2. Центральний не пружний удар двох куль.
При цьому ударі тіла деформуються в точці дотику і потім рухаються з однаковою швидкістю U. Рівняння збереження імпульсу має вигляд
![]() ,
,
і звідси
![]() .
(9)
.
(9)
Робота А, витрачена на деформацію, дорівнює різниці енергій шарів до удару і після удару
![]() ,
,
і після підстановки значення
![]() з (9) одержимо
з (9) одержимо
![]() .
.
2.10.3. Частково пружний удар, коефіцієнт відновлення.
При частково пружному ударі не повністю відновлюється відносна швидкість системи. Можна покласти, що
![]() ,
,
де
![]()
коефіцієнт відновлення швидкості. З
рівняння збереження імпульсу тепер
можна знайти швидкості тіл після удару
коефіцієнт відновлення швидкості. З
рівняння збереження імпульсу тепер
можна знайти швидкості тіл після удару
![]() ,
(10)
,
(10)
![]() .
(11)
.
(11)
Рівняння збереження енергії тепер запишеться як
![]() .
(12)
.
(12)
П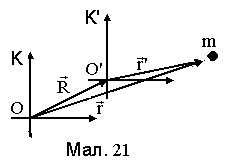 ідставляючи
(10-11) у (12) одержимо величину роботи А на
не пружну деформацію тіл
ідставляючи
(10-11) у (12) одержимо величину роботи А на
не пружну деформацію тіл
![]() .
(13)
.
(13)
Робота А чисельно дорівнює втраті тілами кінетичної енергії.
Зауважимо, що при k=1 удар буде абсолютно пружним, при k=0 не пружним і при 0 k 1 частково пружним.
2.11. Принцип відносності Галілея
2.11.1. Механічний принцип відносності Галілея полягає у тому, що усі механічні явища в різних інерційних системах протікають за однаковими для цих явищ законами за змістом і формою.
Перетворення координат Галілея: час у різних інерційних системах протікає однаково t=t', а координати при переході з нерухомої системи відліку до рухомої (див. мал. 21) перетворюються лінійно:
![]() ,
,
де
![]() швидкість рухомої системи відносно
нерухомої.
швидкість рухомої системи відносно
нерухомої.
З цього виразу можна одержати рівняння перетворення швидкостей
![]() .
.
В цьому виразі
![]()
абсолютна швидкість,
тобто швидкість тіла в нерухомій системі
відліку,
абсолютна швидкість,
тобто швидкість тіла в нерухомій системі
відліку,
![]()
швидкість тіла в
рухомій системі відліку, яку називають
відносною.
Такі ж вирази можна одержати і для
прискорень
швидкість тіла в
рухомій системі відліку, яку називають
відносною.
Такі ж вирази можна одержати і для
прискорень
![]() ,
,
![]() .
.
2.11.2. Рівняння другого закону
Ньютона в нерухомій системі відліку
має вигляд
![]() m,
в рухомій
m,
в рухомій
![]() ,
де
,
де![]()
сила інерції.
сила інерції.
У випадку, коли система K'
інерційна, тобто
![]() ,
то
,
то![]() ,
,![]() і рівняння другого закону Ньютона
зберігають свій вигляд як у нерухомій
так і у рухомій інерційній системі
відліку. Це і пояснює принцип відносності
Галілея.
і рівняння другого закону Ньютона
зберігають свій вигляд як у нерухомій
так і у рухомій інерційній системі
відліку. Це і пояснює принцип відносності
Галілея.
2.12.Динаміка обертового руху
2.12.1. Момент сили
В обертовому русі замість сили
обертовому русі замість сили![]() використовується момент сили
використовується момент сили![]() ,
а замість імпульсу
,
а замість імпульсу![]() вживається момент імпульсу
вживається момент імпульсу![]() .
Момент сили
.
Момент сили
![]() визначається так, щоб вектори кутової
швидкості та кутового прискорення, які
виникають внаслідок його дії, збігалися
з напрямком
визначається так, щоб вектори кутової
швидкості та кутового прискорення, які
виникають внаслідок його дії, збігалися
з напрямком![]() .
Таким чином зазначеній умові відповідає
момент сили
.
Таким чином зазначеній умові відповідає
момент сили![]() ,
який дорівнює векторному добуткові
радіус-вектора
,
який дорівнює векторному добуткові
радіус-вектора![]() точки прикладання сили відносно початку
відліку О (див. Мал. 22) й вектора сили
точки прикладання сили відносно початку
відліку О (див. Мал. 22) й вектора сили![]()
![]() .
(1)
.
(1)
![]() ,
причому плече сили дорівнює висоті
паралелограма, опущеної на основуF.
,
причому плече сили дорівнює висоті
паралелограма, опущеної на основуF.
Дві
рівні за величиною сили
![]() ,
що лежать в одній площині і діють на
тіло в протилежних напрямках,називаються
парою сил. Їх моменти
сил відносно точки О будуть
,
що лежать в одній площині і діють на
тіло в протилежних напрямках,називаються
парою сил. Їх моменти
сил відносно точки О будуть
![]() ,
а результуючий момент
,
а результуючий момент![]() за величиною
за величиною
![]() ,
,
де
![]() плече сили F1,
плече сили F1,
![]() плече силиF2,
плече силиF2,
![]() плече пари сил, а F=F1=F2.
плече пари сил, а F=F1=F2.
2.12.2. Момент імпульсу
Момент імпульсу
![]() тіла визначається як вектор, що дорівнює
векторному добуткові радіус-вектора
тіла визначається як вектор, що дорівнює
векторному добуткові радіус-вектора
![]() (див. Мал. 15) положення
тіла й вектора імпульсу
(див. Мал. 15) положення
тіла й вектора імпульсу
![]() тіла
тіла
![]() .
(2)
.
(2)
Розглянемо
момент імпульсу докладніше, прийнявши
до уваги визначення імпульсу та кутових
і лінійних характеристик обертового
руху. Н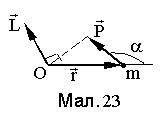 ехай
точкове тіло обертається по колу з
радіусом-вектором положення тіла
ехай
точкове тіло обертається по колу з
радіусом-вектором положення тіла
![]()
лінійній швидкості
лінійній швидкості
![]() .
Вираз (1) у цьому випадку можна послідовно
перетворити у вигляд:
.
Вираз (1) у цьому випадку можна послідовно
перетворити у вигляд:
![]() (3)
(3)
![]() ,
,
де
![]() ,
(4)
,
(4)
момент інерції тіла.
де J величина моменту інерції тіла.
В (3) ми використали відому формулу для подвійного векторного добутку (див. Математичний додаток)
![]() .
.
Таким чином момент імпульсу
(3) дорівнює добуткові моменту інерції
тіла J
на його кутову швидкість
![]() ,
які є аналогами маси тіла m
та його швидкості
,
які є аналогами маси тіла m
та його швидкості
![]() у поступальному русі.
у поступальному русі.