

Конспект лекций
.pdfРис. 5.9. Приклад перевірочної бази при розточки фундаментної рами двигуна (А. П. Соколовський)
Для того щоб забезпечити паралельність осі отворів при їх розточки по відношенню до площини з’єднання фундаментної рами з блоком циліндрів (площина А) при установки рами на розточувальному верстаті необхідно ретельно виставити горизонтальність площини А. Шпиндель розточувального верстата здійснює строго горизонтальний рух подачі вздовж осі отвору. Таким чином досягається паралельність осі отвору, який оброблюється та поверхні А. Правильне положення поверхні А досягається за допомогою застосування спеціальних клинових підкладок, які вставляють між опорною площиною В та опорами С. Вивірку положення поверхні А здійснюють за допомогою точних ватерпасів або іншими засобами.
Часто в якості перевірочної бази використовують поверхні, які оброблюються. В цьому випадку знижується припуск на обробку. Іншими різновидностями перевірочних баз можуть служити розміточні риски по яким визначається положення заготовки або різальних інструментів.
Вимірювальні бази це поверхні від яких визначають розташування оброблюваної поверхні з застосуванням вимірювальних пристроїв.
5.2.Принципи базування
5.2.1.Правило шести точок
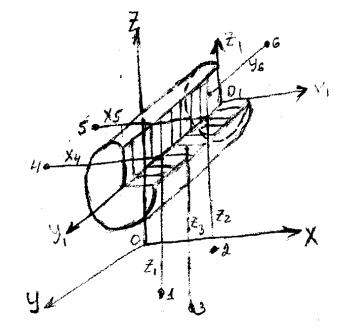
Воснові правила базування лежить відоме у теоретичній механіки положення про те, що вільне абсолютно тверде тіло може мати шість ступіней свободи відносно вибраної системи координат, тобто переміщення паралельно координатним осям та три обертання навколо них. Тому положення тіла у прямокутній системі координат можна визначити шістьома незалежними координатами (рис. 5.10). При цьому кожна з координат обмежує одну ступінь
121

вільності. З тілом зв’язана рухома система координат O1X1Y1Z1. ЇЇ положення в системі координат OXYZ визначають координати x, y, z. Положення рухомої системи координат буде визначеним якщо вибрати на площині X1 O1Y1 три точки, які не лежать на прямій лінії, на Y1 O1Z1 – дві, на X1 O1Z1 – одну і задати значення їх координат (z1, z2, z3, x4, x5, y6) відносно нерухомої системи координат OXYZ. Незмінність значень координат є умовою дії шести геометричних зв’язків.
Рис. 5.10. Визначення положення твердого тіла в прямокутній системі координат
В реальних умовах базування заготовок у пристроях позиційні зв’язки реалізуються через безпосередній контакт відповідних поверхонь або їх елементів заготовок і пристроїв. При цьому число опорних точок повинно відповідати числу обмежуючих зв’язків. Забезпечення контакту поверхонь заготовки та опорних точок пристроїв та збереження нерухомості заготовки в процесі її обробки здійснюється за рахунок прикладення сил. Прикладені сили при цьому не беруть участі у базуванні. Треба відмітити що при дії сил на опорні точки виникають додаткові зв’язки за рахунок сил тертя у точках контакту. Вони заважають здійснювати повний контакт з усіма опорними точками і тому можуть бути причиною похибок при базуванні.
122

Розглянемо правило шести точок на прикладах базування деталей типової геометричної форми: призматичні (корпусні деталі), циліндричні (вали) та дисків.
Призматичні тіла це деталі з розвинутими плоскими поверхнями (Рис. 5.11).
Рис. 5.11. Базування призматичної деталі
Одна з площин заготовки А, яка лежить в координатній площині заготовки x1 o1y1 і являється як правило найбільш розвинутою, зв’язується трьома зв’язками (z1, z2, z3) з системою координат OXYZ і полишає заготовку трьох ступіней вільності. Ця система координат відноситься до пристрою або верстату. Ці три зв’язка повністю визначають положення площини так як через три точки у просторі можна провести тільки одну площину. Зв’язок z1 накладає обмеження на переміщення заготовки уздовж координатної осі Z. Додавання зв’язка z2 обмежує обертання заготовки навколо осі X а додавання третього зв’язку навколо осі Y. База яка обмежує три ступіні вільності називається опорною (установчою) базою.
Площина Б заготовки лежить у координатній площині заготовки y1 o1z1 і як правило має оди із розмірів найбільший, в даному випадку це розмір у напрямку осі Y. Лінія або напрямок завжди проходить у просторі однозначно
123

через дві точки. Тому зв’яжемо у цьому напрямку площину Б заготовки з координатною площиною YOZ двома зв’язками (x4, x5). Зв’язок x4 обмежує переміщення заготовки вздовж осі X а додавання зв’язку x5 обмежує обертання навколо осі Z. База, яка обмежує два зв’язка, називається напрямною базою.
Площина В заготовки, яка лежить у координатній площині заготовки x1 o1z1, для створення останнього шостого зв’язку зв’яжемо з координатною площиною Z1X1 O1. Цей зв’язок накладає останнє обмеження на переміщення заготовки у напрямку осі Y і називається упорною базою.
Таким чином накладені шість зв’язків обмежують усі шість ступіней вільності на переміщення заготовки. На рис. 5.12 приведено реальне базування призматичної заготовки на шість установчих штифтів. Штифти 1, 2, 3 відтворюють установчу (опорну) базу, штифти 4, 5 напрямну базу і штифт 6 упорну базу.
Рис. 5.12. Реальна схема базування призматичної заготовки на 6 опорних штифтах.
124
Заготовки з розвинутими циліндричними поверхнями відносяться до типу валів. Схема базування таких заготовок приведена на рис. 5.13 .
Рис. 5.13. Схема базування циліндричної заготовки
Циліндрична поверхня заготовки являється найбільш розвинутою і контактує при установки у пристроях з відповідними площинами по прямих лініях, які являється установчими напрямними базами. Як раніше визначалось такі бази накладають два зв’язка (1, 2 та 4, 5) і обмежують дві ступіні вільності. Умовно ці зв’язки віднесені до осі заготовки. Зв’язок 1 обмежує переміщення уздовж осі Z. Зв’язок 2 обмежує обертання навколо осі X. Зв’язок 4 обмежує переміщення уздовж осі X. Зв’язок 5 обмежує обертання навколо осі Z. Зв’язок 6 обмежує переміщення уздовж осі Y. Зв’язок 3, який є зв’язком між площиною YOX площиною перетину Y1O1X1, обмежує обертання навколо осі Y.
125
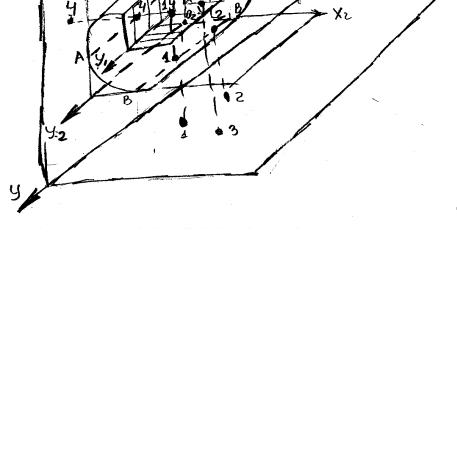
Рис. 5.13. Схема базування циліндричної заготовки Циліндрична поверхня заготовки являється найбільш розвинутою і
контактує при установки у пристроях з відповідними площинами по прямих лініях, які являється установчими напрямними базами (А-А і В-В, рис. 5.13). Як раніше визначалось кожна з таких баз накладає два зв’язки (1, 2 та 4, 5) і обмежують дві ступіні вільності. Умовно ці зв’язки віднесені до осі заготовки(О1-Z1). Зв’язок 1 обмежує переміщення уздовж осі Z. Зв’язок 2 обмежує обертання навколо осі X. Зв’язок 4 обмежує переміщення уздовж осі X. Зв’язок 5 обмежує обертання навколо осі Z. Зв’язок 6 обмежує переміщення уздовж осі Y. Зв’язок 3, який є зв’язком між площиною YOX площиною перетину Y1O1X1, обмежує обертання навколо осі Y.
Реальне відтворення схеми базування (рис. 5.13) представлено на рис. 5.14.
126
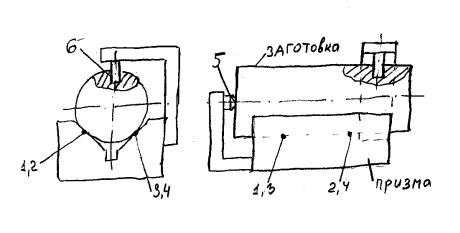
Рис. 5.14. Реальна схема базування циліндричної заготовки у призмі.
Заготовка базується на призмі, яка утворює дві напрямні бази 1 - 2 та 3 – 4. Переміщення уздовж осі заготовки обмежує упорна база 5, а обертання навколо осі упорна база 6. Таким чином у даній схемі базування реалізовані дві напрямні та дві упорні бази, які пов’язані з відповідними поверхнями пристроїв.
Короткі циліндричні заготовки з розвинутими торцевими поверхнями відносяться до класу деталей типа диски. Схема базування таких заготовок приведена на рис. 5.15 .
127
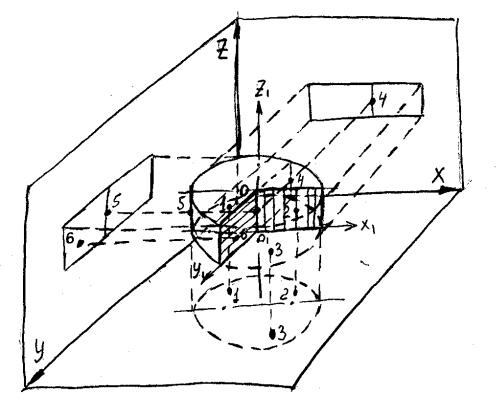
Рис. 5.15. Схема базування заготовки типа диск.
Самою розвинутою на таких заготовках є торцева поверхня. Тому як правило ця поверхня може бути установчою (опорною) базою. Вона відтворюється як і для призматичної заготовки трьома з’язками 1, 2, 3, які зв’язують торцеву поверхню заготовки, яка лежить у координатній площині X1O1Y1 з координатною площиною XOY пристрою або верстата. Ці три зв’язки обмежують переміщення заготовки вздовж осі Z та обертання навколо осей X і Y. Переміщення заготовки уздовж осей X і Y обмежують відповідно зв’язки 5 та 4. Останнє можливе переміщення може бути обмежене, якщо накласти зв’язок між площиною перетину Z1O1Y1 заготовки та координатною площиною Z OY.
Реальне відтворення схеми базування (рис. 5.15) представлено на рис. 5.16. Опорна площина А відтворює установчу (опорну) базу. Коротка призма відтворює дві упорні бази 4 та 5. Палець 6 відтворює упорну базу. Таким чином у даному випадку використовується комплект з 1 установчої бази та 3 упорних баз.
128
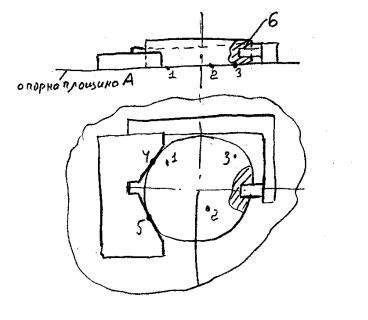
Рис. 5.16. Реальна схема базування заготовки типа диск
5.2.2. Принцип постійності (незмінності) баз
5.2.3.
Додержання принципу постійності баз, які використовуються для установки заготовок при обробленні, зменшує похибки обробки, особливо похибки взаємного розташування оброблених поверхонь. Тому при обробленні заготовок на різних операціях необхідно по можливості вибирати для комплектів баз одні і ті ж поверхні заготовок. В деяких випадках цей принцип виконати буває не можливим. Ці випадки пов’язані з конструктивними особливостями деталі, коли при обробленні засовки на різних операціях неможливо за базові прийняти одні і ті ж поверхні. Причиною зміни баз може бути також спрощення конструкції пристроїв, досягнення потрібної точності більш простим способом, економічні міркування тошо.
129
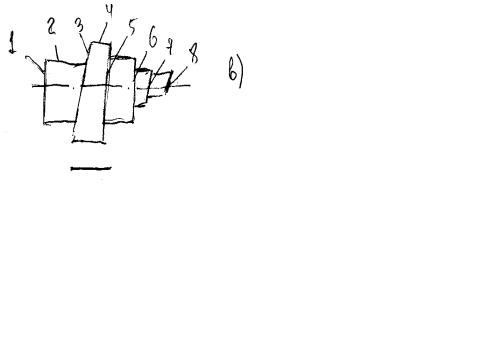
Рис. 5.17. Обробка циліндричної заготовки при зміні баз
На рис. 5.17 представлена схема впливу зміни баз при обробленні циліндричної заготовки на похибки взаємного розташування торцевих поверхонь. Непаралельність поверхонь 1 і 3 (рис. 5.17а) перебільшена. Базування заготовки по поверхням 3 та 4 полишає заготовку 5 ступенів вільності (3 по поверхні 3 та 2 по поверхні 4). Тому обробка торцевих поверхонь 7 та 8 буде здійснюватись паралельно базовій поверхні 3 (рис. 5.17б). . Базування заготовки по поверхням 1 та 2 полишає заготовку 5 ступенів вільності (3 по поверхні 1 та 2 по поверхні 2). Тому обробка торцевих поверхонь 5 та 6 буде здійснюватись паралельно базовій поверхні 1 (рис. 5.17в). Таким чином між поверхнями 5 і 6 та 7 і 8 виникає додаткова похибка непаралельності зі зміною баз.
На рис. 5.18. представлений приклад впливу зміни баз на виникнення похибки розміру.
130