

Higher_Mathematics_Part_1
.pdfΑx + Βy + Cz + D = 0, |
(2.12) |
which is called a general equation of a plane.
Remark. For arbitrary values of A, B and C, which are not equal to zero, the equation (2.11) defines a bundle of planes, i.e. a set of planes which pass
through the given point Μ0 (x0 , y0 , z0 ) that is a centre of the bundle.
8.2. Incomplete equations of a plane
The equation (2.12) is called incomplete if at least one of the coefficients A,B,C ,D is equal to zero. Some cases of the incomplete general equation of a plane are shown in Table 8.1.
|
|
Table 8.1 |
|
|
|
|
|
Condition |
The equation of a plane |
Position of a plane |
|
|
|
|
|
D = 0 |
Ax + By + Cz = 0 |
It passes through the origin |
|
of coordinates |
|||
|
|
||
|
|
|
|
А = 0 |
By + Cz + D = 0 |
It is parallel to an axis Ох |
|
|
|
|
|
А = 0, В = 0 |
Cz + D = 0 |
It is parallel to a plane Оху |
|
|
|
|
|
А = 0, В = 0, D = 0 |
z = 0 |
It is the plane Оху |
|
|
|
|
|
А = 0, D = 0 |
By + Cz = 0 |
It passes through an axis Ох |
|
|
|
|
Other cases of the incomplete equations may be considered in the similar manner.
8.3. Equations of a plane passing through three given points
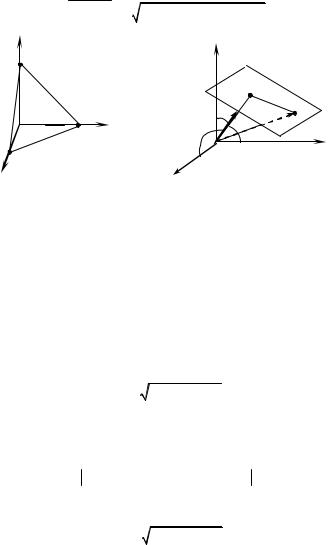
Let three points Μ1 (x1 , y1 , z1 ) , Μ2 (x2 , y2 , z2 ), Μ3 (x3 , y3 , z3 ) be given. They do not lie on the same straight line (Fig. 2.9). These points unequivocally determine a plane. We shall find an equation of this plane.
To this end we shall take any point Μ(x, y, z) in this plane and we shall find vectors:
|
|
JJJJG |
|
|
M2 |
M3 |
M1M |
={x −x1 ; y −y1; z −z1} , |
|
|
JJJJG |
|
|
|
M |
|
|
|
|
|
Μ1Μ2 |
={x2 −x1 ; y2 −y1; z2 −z1} |
||
М1 |
|
JJJJG |
|
|
Fig. 2.9 |
|
Μ1Μ3 |
={x3 −x1 ; y3 −y1 ; z3 −z1} . |
|
101

So as all four points as well as the found vectors lie in one plane, these
vectors are coplanar. Due to the condition of coplanarity their triple product |
||||||||||
JJJJJG |
|
JJJJJJJG |
JJJJJJJG |
|
|
|
|
|
|
|
M1M |
M1M 2 |
M1M2 |
= 0. It may be represented in coordinate form |
|
||||||
|
|
|
|
|
x −x1 |
y −y1 |
z −z1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
x2 −x1 |
y2 −y1 |
z2 −z1 |
|
= 0. |
(2.13) |
|
|
|
|
|
x3 −x1 |
y3 −y1 |
z3 −z1 |
|
|
|
The formula (2.13) is the equation of a plane passing through three given points.
Having expanded this determinant by elements of the first row we can get a general equation of a plane.
8.4. Equation of a plane in segments on axes
Let a plane intersect coordinate axes at points Α(a; 0; 0) , Β(0; b; 0) and C(0; 0; c). (Fig. 2.10.) Then the equation (2.13) looks as following:
x −a y z
−a b 0 = 0 −a 0 c
It is equivalent to the equation |
|
|
|
|
|
|
|
|
x |
+ |
y |
+ |
z |
= 1. |
(2.14) |
|
a |
b |
c |
||||
|
|
|
|
|
|||
The latter (2.14) is called a plane equation in segments on axes.
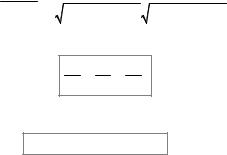
8.5. Normal equation of a plane. Distance from a point to a plane
|
|
The normal equation of a plane may be received if the plane is defined by |
||||||||
the length |
p of the perpendicular |
ΟP dropped from the origin of coordinates |
||||||||
onto the plane and by the angles α, |
β, γ |
formed by the perpendicular ΟP with |
||||||||
coordinate axes (Fig.2.10). |
|
|
|
|
|
|
||||
|
|
Let us |
take a point M (x, y, z) in |
the plane. It is |
easy |
to |
see that the |
|||
|
|
|
|
JJJJG |
onto theJJJGnormal vector |
|
|
G |
||
projection |
of the vector OM |
of |
the |
plane n0 = |
||||||
= |
{ |
|
} |
|
PrJJG |
OM = p . |
|
|
|
|
|
cos α, cosβ, cos γ |
is equal to p: |
|
|
|
|||||
|
|
|
|
|
|
n0 |
|
|
|
|
102 |
|
|
|
|
|
|
|
|
||
So we get |
JJJJG |
|
|
G |
|
|
|
|
|
|
|
|
x cos α + y sin β + z cos γ |
|
|||
p := |
OM |
n0 |
= |
. |
||||
|
G |
|
|
|
|
|||
|
|
|
|
|
||||
|
|
n0 |
|
|
|
cos2 α + cos2 β + cos2 γ |
|
|
|
|
|
|
|
||||
z
z
C(0, 0, c)
|
|
|
|
p Р |
|
О |
y |
|
|
М |
|
|
γ |
n0 |
|||
B(0, b, 0) |
α |
||||
|
β |
y |
|||
A(a, 0, 0) |
|
х |
О |
||
x |
|
|
|
||
Fig. 2.10 |
|
|
Fig. 2.11 |
||
So as cos2 α + cos2 β + cos2 γ = 1 we get the final equation
x cosα+ y cos β+ z cos γ− p = 0. |
(2.15) |
The equation (2.15) is called the normal equation of a plane.
Properties of this equation:
a)the sum of squares of coefficient before x, y, z is equal to 1;
b)the constant term is introduced in the equation with the sign «–».
To reduce the general equation (2.12) to the normal view it is necessary to multiply it by so called the normalizing factor.
μ = ± |
1 |
, |
|
A2 + B2 + C2 |
|||
|
|
whose sign is chosen opposite to the sign D .
The normal equation (2.15) is applied to find the distance d of the point Μ0 (x0 , y0 , z0 ) to the plane. This distance may be calculated by the formulas
d = x0 cos α + y0 cosβ + z0 cos γ − p ,
or
d = |
|
Ax0 |
+ By0 + Cz0 |
+ D |
|
. |
(2.16) |
|
|
||||||
|
|
A2 + B2 + C2 |
|
||||
|
|
|
|
|
|
||
The value
δ = x0 cos α + y0 cosβ + z0 cos γ,
is named a deviation of the point Μ0 (x0 , y0 , z0 ) from a plane.
103
If the point Μ0 and the origin of coordinates lie on the same side out of the plane, then, δ < 0 and otherwise δ > 0.
8.6. Angle between two planes, conditions of parallelism and perpendicularity of planes
Given planes
α1: Α1 x + Β1 y +C1 z + D1 = 0 , α2: Α2 x + Β2 y +C2 z + D2 = 0 . An angle between these planes may be found by the formula
|
G |
|
Α1 Α2 + Β1B2 +C1C2 |
|
|
cos ϕ = |
nG1 nG2 |
= |
. |
||
|
|||||
|
| n1| | n1| |
|
Α12 + B12 +C12 Α22 + B22 +C22 |
|
The condition of parallelism of planes is
A1 = B1 = C1 .
A2 B2 C2
The condition of perpendicularity of planes is
Α1 Α2 + Β1B2 +C1C2 = 0.
Micromodule 8
EXAMPLES OF PROBLEMS SOLUTION
Example 1. Coordinates of four points are given M0 (2; 3;1), M1(1; 2; −1), M2 (3;1;−2), M3 (−2; 3;−2). Find:
a)an equation of the plane M1 M2 M3 ;
b)an equation of the plane passing through the point M0 and parallel to the
plane M1 M2 M3 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
c) an equation of the plane passing through the point M |
0 |
perpendicular to |
|||||||||||||||||
|
|
JJJJJJJG |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
the vector |
M1M3; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d) distance from the point M0 |
to the plane M1 |
M2 M3 . |
|
|
|
|
|
|
|||||||||||
Solution. a) We can take an arbitrary point M(x, y, z) |
on the plane M1 M2 M3 |
||||||||||||||||||
and consider three vectors |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
JJJJJG |
|
{ |
} |
JJJJJJG |
|
{ |
|
} |
JJJJJJG |
|
{ |
|
} |
||||||
1 |
M |
= |
1 |
M |
2 |
= |
|
1 |
M |
3 |
|
= |
−3; 1; |
||||||
M |
|
x − 1, y − 2, z + 1 , M |
|
|
2, − 1, − 1 , M |
|
|
|
− 1 . |
||||||||||
104 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

According to the formula (2.13) we get the equation
x − 1 |
y − 2 |
z + 1 |
|
|
|||
2 |
−1 |
−1 |
= 0, |
−3 |
1 |
−1 |
|
It may be rewritten as a general equation of the plane M1M2 M3 . 2x + 5y − z − 13 = 0.
b) We can write down the equation of a plane passing through the point M0 and parallel to the plane M1M2 M3 taking into account the fact that parallel planes have collinear normal vectors. The normal vector of the plane M1M2 M3
is a vector nG = |
{ |
2; 5; − |
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 . |
|
|
|
|
|
|
|
|
|
|
|
|
||
By the formula (2.11) the equation of a desired plane looks as follows: |
|
|
|||||||||||||
2(x −2) +5( y −3)−(z −1) = 0 or 2x +5y −z −18 = 0 . |
|
|
|||||||||||||
с) To write down the equation of a plane passing through the point |
M |
0 |
|||||||||||||
perpendicularly to the vector |
JJJJJJG |
|
|
|
|
|
|
|
|||||||
Ì 1Ì |
3 , we take advantage of the equation (2.11) |
||||||||||||||
|
|
|
|
|
|
|
JJJJJJG |
|
|
|
|
|
|
|
|
where coordinates of |
the vector |
Ì 1Ì 3 are |
coordinates of a normal vector: |
||||||||||||
−3(x − 2) + ( y − 3) − (z − 1) = 0, or 3x − y + z − 4 = 0. |
|
|
|
|
|||||||||||
d) The distance from the point M0 (2; 3;1) |
to the plane M1M2 M3 , given by |
||||||||||||||
the equation 2x +5y −z −13 = 0, may be found by the formula (2.16): |
|
|
|||||||||||||
|
|
d = |
|
2 2 + 5 3 − 1 − 13 |
|
= |
|
5 |
. |
|
|
||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2 2 + 52 + (− 1)2 |
|
|
|
30 |
|
|
|||||
Example 2. Find an equation of a plane passing through the point M0 (1; − 2; 4) and parallel to two vectors a = {2; − 1; 0} and b = {3; − 1; 3} .
G Solution. So as the plane is parallel to the vectors a and b the normal vector
n of the required plane is perpendicular to these vectors. Therefore weGcan take
a cross product of the vectors a and b for the normal vector: n = aG× b (recall the definition of a cross product of two vectors), that is
GG
G G G |
i |
j |
k |
G |
G G |
n = a × b = 2 |
−1 |
0 = −3i |
− 6 j + k. |
||
|
3 |
−1 |
3 |
|
|
105
By the formula (2.11) we write down the equation of the required plane −3(x − 1) − 6( y + 2) + (z − 4) = 0 , or 3x + 6 y − z + 13 = 0 .
Example 3. Evaluate the volume of the pyramid bounded by the coordinate planes and the plane 3x −5y +2z −30 = 0 .
Solution. So as the pyramid is rectangular it is easy to find its volume by the |
||||||||||||
formula V = 1 |
|
OA |
|
|
|
OB |
|
|
|
OC |
|
where А, В, С are intersection points of the plane |
|
|
|
|
|
|
|||||||
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
with coordinate axes. (see Fig. 2.10). |
||||||||||||
On the axis Оx |
|
coordinates y and z are equal to zero, therefore having |
||||||||||
substituted y |
= 0 and z = 0 |
in the equation of the last plane, we can find |
3x −30 = 0 , |
or x =10 . So |
Α(10; 0; 0) is an intersection point of that plane |
with the axis Оx. Similarly we can find intersection points of the plane with the axes Оу and Оz.
So, | OA |=10 , | OB |= 6 , | OC |=15 and
V = |
1 |
1 0 6 1 5 = 1 5 0 (of cubic units). |
|
|
|
|
|
||
|
|
|
|
|
|
||||
6 |
|
|
|
|
|
|
|
|
|
|
|
Micromodule 8 |
|
|
|
|
|
|
|
CLASS AND HOME ASSIGNMENTS |
|
|
|
|
|
||||
1. Coordinates of points M0 (0; −2; 4) , M1 (1; 5; |
−5) , |
M2 (3; |
0; −2) , |
||||||
M3 (−1; 3; 2) are given. Find: |
|
|
|
|
|
|
|
||
а) an equation of the plane M1M2 M3 ; |
|
|
|
|
|
|
|
||
b) an equation of the plane passing through the point M0 |
parallelly to the |
||||||||
plane M1M2 M3 ; |
M |
|
|
|
|
|
|
||
c) an equation of the plane passing through the point |
0 |
and perpendicular |
|||||||
JJJJJJG |
|
|
|
|
|
|
|||
to the vector M1M3 ; |
|
|
|
|
|
|
|
||
d) distance of the point M0 to the plane M1M2 M3 . |
|
|
|
|
|
|
|
||
2. Find an equation ofGthe plane passing through the point |
M0 |
(2; |
−1; |
6) |
|||||
and parallel to the vectors a = {3; − 2; 1} and b = {−1; − 4; 3} . |
|
|
|
|
|
||||
3. Find an equation of the plane passing through the points M1 (2; |
3; |
−1) |
|||||||
and M2 (0; 2; 2) and parallel to the vector a = {4; − 1; 3} . |
|
|
|
|
|
|
|||
4. Evaluate the volume of the pyramid bounded by the plane |
2x +3y − |
||||||||
−6z = 24 and coordinate planes. |
|
|
|
|
|
|
|
||
5. Find direction cosines of a normal vector of |
the |
plane |
2x +6y − |
||||||
−3z +14 = 0 and evaluate the distance from the origin to this plane.
106

6. Show that three planes |
x − 2y + z − 7 = 0 , 2x + y −z +2 = 0 and |
x−3y+ |
||||||||||
+2z −11 = 0 have a common point and find coordinates of this point. |
|
|
|
|||||||||
7. Prove that the plane |
3x − 4 y − 2z + 5 = 0 intersects a line |
segment |
||||||||||
connecting two points M1 (3; |
−2; 1) and M2 (−2; 5; 2) . |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Answers |
|
|
|
|
|
1. а) 29x +20y +14z −59 = 0 ; b) 29x +20y +14z −16 = 0 ; c) 2x +2y − |
||||||||||||
−7z +32 = 0; d) |
16 |
|
. 2. x +5y +7z =39 . 3. 3y +z =8. 4. 64. 5. cosα= |
2 |
, |
|||||||
|
|
|
1437 |
|
|
|
|
7 |
|
|||
cos β= |
6 |
, cos γ = − |
3 |
; d = 2 . 6. (1; –2; 2). 7. Hint. You have to show that |
||||||||
|
|
|||||||||||
7 |
|
7 |
|
|
|
|
|
|
|
|
||
deviations of points M1 |
and M2 from the plane have opposite sings. |
|
|
|
||||||||
|
|
|
|
|
|
|
Micromodule 8 |
|
|
|
|
|
|
|
|
|
|
SELF–TEST ASSIGNMENTS |
|
|
|
|
|
||
8.1. Coordinates of points |
M0 , M1 , M2 , M3 are given. Find: |
|
|
|
||||||||
а) an equation of the plane M1M2 M3 ; |
|
M0 parallel to the |
||||||||||
b) an equation of the plane passing through the point |
|
|||||||||||
plane M1M2 M3 ; |
|
|
|
|
|
|
|
|
|
|
||
в) an equation of the plane passing through the point M |
0 |
and perpendicular |
||||||||||
|
|
JJJJJJJG |
|
|
|
|
|
|
|
|||
to the vector Ì 1Ì |
3 . |
|
|
|
|
|
|
|
|
|
||
8.1.1.M0 (0; –1; 1), M1(1; 0; 1), M2(4; 6; 1), M3(6; –1; 0).
8.1.2.M0 (0; 1; 1), M1(–13; 0; 6), M2(10; 1; –3), M3(–2; 1; 3).
8.1.3.M0 (0; 4; 1), M1(6; –8; –2), M2(–4; 10; –1), M3(0; –2; –3).
8.1.4.M0 (0 ;1; 2), M1(2; 0; 2), M2(8; –1; 7), M3(12; 1; 1).
8.1.5.M0 (0; 1; –2), M1(1; –12; 8), M2(0; 11; –10), M3(0; –1; 2).
8.1.6.M0 (1; –1; 0), M1(7; –5; –1), M2(–3; 13; 0), M3(1; 1; –2).
8.1.7.M0 (1; 3; 1), M1(0; –2; –1), M2(–3; –1; 6), M3(–5; –3; 0).
8.1.8.M0 (1; 2; 3), M1(14; 3; –2), M2(–9; 2; 7), M3(3; 2; 1).
8.1.9.M0 (–3; 1; –1), M1(–7; 0; 5), M2(11; 1; –5), M3(–1; –1; –1).
8.1.10.M0 (0; –1; 1), M1(1; 0; 1), M2(4; 6;1), M3(6; –1; 0).
8.1.11.M0 (1; 0;–1), M1(–2; –1; 4), M2(11; 0; 5), M3(–1; 0;1).
8.1.12.M0 (–2; –2; 3), M1(4; 6; 2), M2(–6; 12; 3), M3(–2; 0; 1).
8.1.13.M0 (1;−2;−1) , M1 (2;−1;−1) , M 2 (5; 0; 4) , M3 (7;−2;−2) .
107
8.1.14.M0 (2; 0; 0) , M1 (−4; 5; 1) , M2 (2; 0;−4) , M3 (−2; 0;−2) .
8.1.15.M0 (3;−1; 2) , M1 (7; 5; 0) , M2 (−1;−5; 2) , M3 (1;−1;−2) .
8.1.16.M0 (2; 1; 0) , M1 (3; 2; 0) , M2 (6; 3; 5) , M3 (8; 1;−1) .
8.1.17.M0 (3; 5;1) , M1 (−3; 9; 2) , M2 (7;−9; 1) , M3 (3; 3; 3) .
8.1.18.M0 (−1;1; 0) , M1 (0;1; 1) , M2 (1; 6; 4) , M3 (−1; 0; 6) .
8.1.19.M0 (4;−2;−6) , M1 (2;−4; 4) , M2 (4;−2;1) , M3 (0;−2; 2) .
8.1.20.M0 (−1;−3; 1) , M1 (5;−7; 0) , M2 (−5; 1;1) , M3 (−1;−1;−1) .
8.1.21.M0 (−1; 0; 3) , M1 (0;1; 3) , M2 (3; 2; 8) , M3 (5; 0; 2) .
8.1.22.M0 (2;−1;−3) , M1 (−1;−2; 2) , M2 (2;−1;−7) , M3 (0;−1; 1) .
8.1.23.M0 (−2; 3; 2) , M1 (10; 7; 1) , M2 (−1; 0; 2) , M3 (−2;1; 0) .
8.1.24.M0 (1; 0; 2) , M1 (0; 1; 2) , M2 (−1; 4;12) , M3 (1; 6; 0) .
8.1.25.M0 (3; 2;−2) , M1 (−4;−9; 0) , M2 (6; 9;−1) , M3 (2;−3;1) .
8.1.26.M0 (2;−1;−5) , M1 (−1;1; 3) , M2 (3; 2;−6) , M3 (1; 2; 0) .
8.1.27.M0 (2; 3;1) , M1 (1; 2; 1) , M2 (−2; 1;−4) , M3 (−4; 3; 2) .
8.1.28.M0 (0;−1;1) , M1 (−1; 4;12) , M2 (0;−5; 1) , M3 (0; 1;−1) .
8.1.29.M0 (0;−8;−2) , M1 (3;−4;−1) , M2 (−2; 5;−1) , M3 (0; 4; 6) .
8.1.30.M0 (0;−2;1) , M1 (13;−3;−4) , M2 (−10; 2; 5) , M3 (2; −2;1) .
8.2. Evaluate the volume of the pyramid bounded by the given plane and coordinate planes. Sketch the figure.
8.2.1. |
4x −3y +12z −60 = 0 . |
8.2.2. 5x −4 y +3z +120 = 0 . |
|
8.2.3. |
2x −3y + z −18 = 0 . |
8.2.4. 6x −2 y +3z +12 = 0 . |
|
8.2.5. |
4x −5y +2z −20 = 0 . |
8.2.6. 3x +4y +6z +24 = 0 . |
|
8.2.7. |
2x −5y +5z −20 = 0 . |
8.2.8. x −3y +4z +12 = 0 . |
|
8.2.9. |
2x −3y +10z −30 = 0 . |
8.2.10. 5x −3y + z +15 = 0 . |
|
8.2.11. 4x −y +6z −12 = 0 . |
8.2.12. 7x +2 y −z +14 = 0 . |
||
8.2.13. 3x −2 y +8z −24 = 0 . |
8.2.14. 3x + y −7z +21 = 0 . |
||
8.2.15. x −4 y +2z −8 = 0 . |
8.2.16. x −5y −3z +15 = 0 . |
||
8.2.17. 6x −2 y −3z −18 = 0 . |
8.2.18. 5x + y −z +10 = 0 . |
||
8.2.19. 9x −15y +5z −45 = 0 . |
8.2.20. 6x +6 y −7z +42 = 0 . |
||
8.2.21. 9x −4y +12z −36 = 0 . |
8.2.22. 6x +5y −10z +30 = 0 . |
||
8.2.23. 11x −4y +11z −44 = 0 . |
8.2.24. |
4x +7 y −14z +28 = 0 . |
|
8.2.25. 12x −9y +4z −36 = 0 . |
8.2.26. |
2x +9 y −3z −18 = 0 . |
|
8.2.27. 13x −2y +13z −26 = 0 . |
8.2.28. |
2x −7 y −14z −14 = 0 . |
|
8.2.29. 6x −4y +3z −24 = 0 . |
8.2.30. |
x −3y −5z −15 = 0 . |
|
108

Micromodule 9
BASIC THEORETICAL INFORMATION. STRAIGHT LINE IN SPACE. MUTUAL POSITION OF A STRAIGHT LINE AND A PLANE
General equation of a straight line in space, symmetric and parametric equations. Equations of a straight line passing through two given points. Angle between two straight lines, conditions of parallelism and perpendicularity of two straight lines. Intersection point of a straight line and a plane, an angle between a straight line and a plane, conditions of parallelism and perpendicularity of a straight line and a plane, conditions when a straight line lies in a plane.
Literature: [1, chapter 8, item 8.2, 8.3], [4, section 3, item 3.5], [6, chapter 3, § 4—5], [7, chapter2, § 6], [10, chapter2, § 3,4], [11, chapter 2, § 2].
9.1. Symmetric equations of a straight line in space
Let a point Μ0 (x0 , y0 , z0 ) |
and a vector a = {l; m; n} |
be given in space. |
|||||||
Only one straight line passes through this point and is parallel to the vector aG |
|||||||||
(Fig. 2.12). Its equations are: |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
x − x0 |
= |
y − y0 |
= |
z − z0 |
. |
|
(2.17) |
|
|
l |
m |
|
|||||
|
|
|
|
n |
|
|
|||
The equations (2.17) are called symmetric equations of a straight line in space. The proof of these equations is similar to the case of a straight line in a plane (formula (2.3)).
М0
a
Fig. 2.12
9.2. Parametric equations of a straight line
Having denoted each ratio in the equations (2.17) as t:
x − x0 |
= |
y − y0 |
= |
z − z0 |
= t, |
|
l |
m |
n |
||||
|
|
|
109
|
x = x0 + lt |
|
|
we get the equations: |
|
+ mt |
(2.18) |
y = y0 |
|||
|
|
+ nt, |
|
|
z = z0 |
|
|
where t is called a parameter of the line. It can take on any real value.
The equations (2.18) are called parametric equations of a straight line in space.
9.3. Equations of a straight line passing through two given points
Let a straight line |
|
|
L |
pass |
through |
two |
points |
Μ1(x1; y1; z1) and |
|||||||||
Μ2 (x2; y2; z2 ). A vector |
|
|
|
= { x2 − x1; y2 − y1; |
z2 − z1} |
lying on the straight |
|||||||||||
M1M2 |
|||||||||||||||||
line L is a direction vector of this straight line. Then |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
x − x1 = |
y − y1 = |
z − z1 |
|
|
||||||||||
|
|
|
x |
− x |
|
y |
2 |
− y |
|
z |
2 |
− z |
|
|
|
||
|
|
2 |
1 |
|
|
1 |
|
|
|
1 |
|
|
|
||||
is an equation of a straight line passing through two given points.
9.4. General equations of a straight line
Two nonparallel planes intersect each other along a straight line. These
planes are given by the equations |
Α x + Β y +C z + D = 0 and |
Α x + Β y + |
||||||||
|
|
1 |
JG |
|
1 |
1 |
1 |
JG |
2 |
2 |
+C2 z + D2 = 0 . Their normal vectors n1 |
= |
{ A1, B1, C1} and n2 = { A2 , B2 , C2} |
||||||||
JJG |
JJG |
|
|
|
|
|
|
|
|
|
are not collinear, that is, n1 |
× n2 = 0 |
Then the system of the equations |
|
|||||||
|
A1x + B1 y + C2 z + D1 = 0 |
|
|
(2.19) |
||||||
|
A x + B y + C |
2 |
z + D |
= 0, |
|
|
||||
|
2 |
2 |
|
|
2 |
|
|
|
|
|
determines a straight line in space and this system is called |
general equations of |
|||||||||
the straight line (Fig. 2.13).
Usually for practical application the symmetric equations of a straight line are more convenient. To reduce the general equation (2.19) to symmetric form
(2.17) it is necessary to find a point Μ0 (x0 , y0 , z0 ) on the straight line L and a direction vector aG = {l; m; n} of the straight line.
To find such a point we take one of its coordinates, for example z, which is equal to zero or z = z0 . Then from the system (2.19) we have to find corres-
ponding values of two other coordinates. If the system is inconsistent then an arbitrary value may applied to another coordinate. It is possible to take a cross
110