

11.2.3. Оптимизация параметров в условиях неопределенности
Задача оптимизации может быть усложнена, если есть неопределенные параметры. К таким параметрам относятся величины, точные значения которых неизвестны или которые могут изменяться.
Решим задачу
оптимизации, учитывая то, что время
чистого запаздывания
![]() находится в пределах – от 46 до 54 с.
Необходимо синтезировать регулятор,
который обеспечит выполнение требований,
предъявляемых к замкнутой системе, при
любых значениях параметра
находится в пределах – от 46 до 54 с.
Необходимо синтезировать регулятор,
который обеспечит выполнение требований,
предъявляемых к замкнутой системе, при
любых значениях параметра![]() из указанного диапазона.
из указанного диапазона.
Для решения
поставленной задачи, инициализируем в
командном окне MATLAB переменную
![]() с
и изменим параметры блока Time
Delay: параметр Time Delay (рис. 11.22).
с
и изменим параметры блока Time
Delay: параметр Time Delay (рис. 11.22).
Р исунок
11.22 - Настройка параметров блока Transport
Delay
исунок
11.22 - Настройка параметров блока Transport
Delay
Выберем пункт меню Optimization>Uncertainty окна блока NCD Outport. Появится окно Uncertain Variables, предназначенное для задания неопределенностей модели (рис. 11.23).
Р исунок
11.23 - Задание интервала неопределенности
исунок
11.23 - Задание интервала неопределенности
Здесь необходимо указать имена переменных, значения которых варьируются, их верхние и нижние границы, а также указать какие границы неопределенных переменных учитывать при параметрической оптимизации. Установим следующие значения (рис. 11.23):
поле Uncertain variables - t0,
поле Lower bounds - 46 с,
поле Upper bounds - 54 с.
Поставим "галочки"
напротив полей Constrain lower bound simulation и
Constrain upper bound simulation (учитывать при
моделировании и верхние, и нижние
допустимые границы параметра
![]() ).
Теперь можно приступить к процессу
оптимизации, нажав на кнопку Start. Для
каждого этапа оптимизации в окне
отображается по три графика (рис. 11.24).
).
Теперь можно приступить к процессу
оптимизации, нажав на кнопку Start. Для
каждого этапа оптимизации в окне
отображается по три графика (рис. 11.24).
Р исунок
11.24 - Иллюстрация процесса оптимизации
при наличии неопределенных параметров
исунок
11.24 - Иллюстрация процесса оптимизации
при наличии неопределенных параметров
По окончании
процесса оптимизации, оптимальные
значения настраиваемых переменных,
соответствующих окончательным кривым,
сохраняются в рабочем пространстве
MATLAB:
![]() ,
,![]() ,
,![]() .
.
12. Разработка замкнутых систем регулирования (метод желаемой лачх)
В отечественной литературе классическим стал метод синтеза корректирующих устройств с помощью логарифмических амплитудно частотной и фазовой частотной характеристик разомкнутой системы (диаграмм Боде по зарубежной терминологии).
Низкочастотная
часть ЛАЧХ определяет точность системы,
среднечастотная (вблизи частоты среза
![]() )
– устойчивость и качество переходного
процесса, высокочастотная – чувствительность
к помехам. Если система содержит
интегратор, низкочастотная часть имеет
ненулевой наклон (20 дБ
на декаду для одного интегратора),
постоянный сигнал отслеживается без
установившейся ошибки. Для системы с
двумя интеграторами ЛАЧХ имеет в области
низких частот наклон 40 дБ
на декаду, без установившейся ошибки
отслеживается не только постоянный, но
и линейно возрастающий сигнал. Более
сложные требования к точности требуют,
чтобы ЛАЧХ не заходила в некоторые
запретные области.
)
– устойчивость и качество переходного
процесса, высокочастотная – чувствительность
к помехам. Если система содержит
интегратор, низкочастотная часть имеет
ненулевой наклон (20 дБ
на декаду для одного интегратора),
постоянный сигнал отслеживается без
установившейся ошибки. Для системы с
двумя интеграторами ЛАЧХ имеет в области
низких частот наклон 40 дБ
на декаду, без установившейся ошибки
отслеживается не только постоянный, но
и линейно возрастающий сигнал. Более
сложные требования к точности требуют,
чтобы ЛАЧХ не заходила в некоторые
запретные области.
Запас устойчивости
по амплитуде
![]() (в дБ) – это расстояние от ЛАЧХ до
горизонтальной прямой
(в дБ) – это расстояние от ЛАЧХ до
горизонтальной прямой![]() дБ
на частоте, на которой фазовая
характеристика пересекает прямую
дБ
на частоте, на которой фазовая
характеристика пересекает прямую![]() .
На этой частоте система должна иметь
коэффициент усиления меньше 1 (или
.
На этой частоте система должна иметь
коэффициент усиления меньше 1 (или![]() ).
).
Запас устойчивости
по фазе
![]() (в градусах) – это расстояние от частотной
характеристики до горизонтальной прямой
(в градусах) – это расстояние от частотной
характеристики до горизонтальной прямой![]() на частоте среза
на частоте среза![]() .
На этой частоте фазовая характеристика
должна иметь значениебольше
.
На этой частоте фазовая характеристика
должна иметь значениебольше
![]() .
.
Допустимым считается запас по амплитуде не менее 6 дБ и запас по фазе не менее 30 градусов.
«Подъем» ЛАЧХ означает увеличение коэффициента усиления контура, фазовая характеристика при этом не изменяется. Точность системы (при отработке низкочастотных сигналов) повышается, однако увеличивается и влияние высокочастотных помех. Поскольку частота среза увеличивается, повышается быстродействие системы. При этом переходные процессы приобретают выраженный колебательный характер, запасы устойчивости уменьшаются, при дальнейшем увеличении коэффициента усиления теряется устойчивость.
Обычно требуется, чтобы система имела высокую точность (большой коэффициент усиления по контуру) для низких частот и подавляла высокочастотные помехи (имела низкое усиление в области высоких частот). Частота среза выбирается исходя из требований к быстродействию. Таким образом, типичная ЛАЧХ имеет вид, показанный на рисунке. Серым цветом показаны запретные области, которые определяются требованиями к точности и подавлению помех.

Для обеспечения
хорошего качества переходных процессов
рекомендуется, чтобы ЛАЧХ пересекала
ось
![]() с наклоном 20 дБ/дек. Это объясняется
тем, что наклон 20 дБ/дек, соответствующий
апериодическому звену, приводит к
наименьшей колебательности переходного
процесса. Точки перехода от низкочастотной
части к среднечастотной и далее к
высокочастотной должны отстоять от
оси
с наклоном 20 дБ/дек. Это объясняется
тем, что наклон 20 дБ/дек, соответствующий
апериодическому звену, приводит к
наименьшей колебательности переходного
процесса. Точки перехода от низкочастотной
части к среднечастотной и далее к
высокочастотной должны отстоять от
оси![]() на 12-16 дБ.
на 12-16 дБ.
В общем случае
строится желаемая ЛАЧХ
![]() ,
удовлетворяющая требованиям к системе,
затем ЛАЧХ последовательного
корректирующего устройства определяется
как разность между и
,
удовлетворяющая требованиям к системе,
затем ЛАЧХ последовательного
корректирующего устройства определяется
как разность между и![]() и ЛАЧХ существующей разомкнутой системы.
и ЛАЧХ существующей разомкнутой системы.
Разработку устройств с помощью ЛАЧХ удобно проводить, построив предварительно границы желаемой области ЛАЧХ разомкнутой системы. Различают две предельные границы такой желаемой области: низкочастотную и высокочастотную (рис. 8.10). Первая строится в соответствии с требованиями, предъявляемыми к точности работы системы в установившемся режиме, а вторая – исходя из требований, предъявляемых к помехоустойчивости.
Р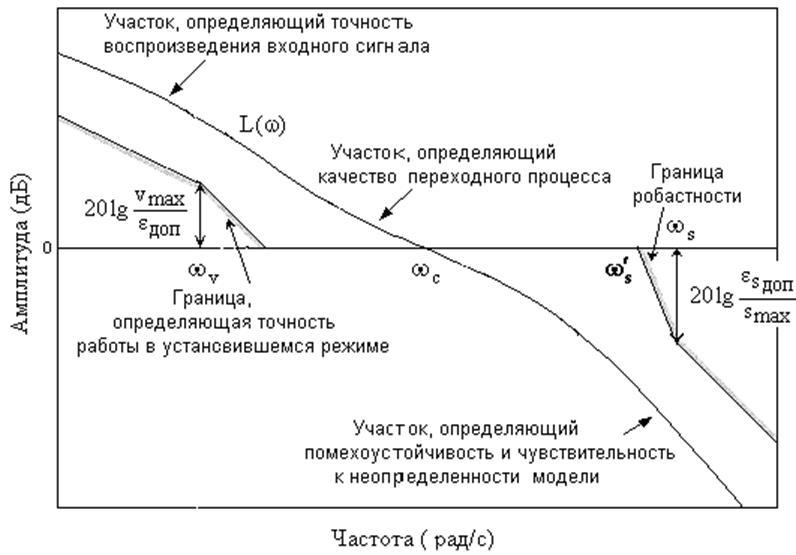 исунок
8.10 – Типичная ЛАЧХ
исунок
8.10 – Типичная ЛАЧХ
Формирование границы точности работы системы в установившемся режиме связано с заданной точностью воспроизведения задающего воздействия. В ряде случаев в задании на проектирование систем автоматизации в качестве задающего воздействия выступает низкочастотный гармонический сигнал.
Частота задающего
сигнала может принимать любые значения
в диапазоне от нуля до верхнего предельного
значения
![]() ,
а его амплитуда на этой частоте не
превышает значения
,
а его амплитуда на этой частоте не
превышает значения![]() .
Амплитуда выходного сигнала на той же
частоте
.
Амплитуда выходного сигнала на той же
частоте![]() .
Кроме верхних предельных значений
частоты и амплитуды, в задании также
указывается величина установившейся
ошибки
.
Кроме верхних предельных значений
частоты и амплитуды, в задании также
указывается величина установившейся
ошибки![]() выходного сигнала.
выходного сигнала.
Условие требуемой
точности воспроизведения данного
гармонического сигнала применительно
к ЛАЧХ разомкнутой системы
![]() запишется в виде:
запишется в виде:
 ,
,
![]() .
.
Уравнение предельной границы точности работы системы в установившемся режиме:
 ,
,
![]() .
.
Проектируемая
система будет обеспечивать требуемую
точность отработки задающего сигнала,
если ЛАЧХ разомкнутой системы в диапазоне
частот
![]() будет располагаться не ниже такой
границы точности.
будет располагаться не ниже такой
границы точности.
Наряду с заданной
точностью воспроизведения гармонического
воздействия система должна, как правило,
безошибочно воспроизводить в установившемся
режиме постоянное задающее воздействие,
то есть должна обладать астатическими
свойствами. Следовательно, низкочастотный
участок ЛАЧХ проектируемой разомкнутой
системы должен иметь наклон, по меньшей
мере, равный
![]() .
Если желаемый порядок астатизма равен
единице, то граница точности работы в
установившемся режиме в диапазоне
частот гармонического задающего сигнала
должна иметь вид прямой, выходящей из
точки с координатами
.
Если желаемый порядок астатизма равен
единице, то граница точности работы в
установившемся режиме в диапазоне
частот гармонического задающего сигнала
должна иметь вид прямой, выходящей из
точки с координатами и имеющей наклон
и имеющей наклон![]() .
.
Таким образом, низкочастотная часть ЛАЧХ разомкнутой системы определяет статическую точность системы в замкнутом состоянии:
горизонтальная линия над осью частот говорит о наличии статической ошибки со значением
 ,
,уклону
 соответствует
астатизм первого порядка (система
обеспечивает нулевую ошибку при
постоянном входном воздействии),
соответствует
астатизм первого порядка (система
обеспечивает нулевую ошибку при
постоянном входном воздействии),уклону
 соответствует
астатизм второго порядка (система
обеспечивает нулевую ошибку слежения
за линейно возрастающим входным
воздействием).
соответствует
астатизм второго порядка (система
обеспечивает нулевую ошибку слежения
за линейно возрастающим входным
воздействием).
Динамические
свойства (качество переходного процесса)
определяются среднечастотным диапазоном
ЛАЧХ, здесь главную роль играет частота
среза
![]() ,
с ее увеличением возрастает быстродействие
системы. Для обеспечения хорошего
качества переходных процессов
рекомендуется, чтобы ЛАЧХ пересекала
ось частот с наклоном
,
с ее увеличением возрастает быстродействие
системы. Для обеспечения хорошего
качества переходных процессов
рекомендуется, чтобы ЛАЧХ пересекала
ось частот с наклоном![]() и протяженность этого участка должна
составлять примерно одну декаду. Это
объясняется тем, что наклон
и протяженность этого участка должна
составлять примерно одну декаду. Это
объясняется тем, что наклон
![]() ,
соответствующий апериодическому звену,
приводит к наименьшей колебательности
переходного процесса. Точки перехода
(излома асимптотической ЛАЧХ) от
низкочастотной части к среднечастотной
и далее к высокочастотной должны
отстоять от оси частот на 12-16 дБ.
,
соответствующий апериодическому звену,
приводит к наименьшей колебательности
переходного процесса. Точки перехода
(излома асимптотической ЛАЧХ) от
низкочастотной части к среднечастотной
и далее к высокочастотной должны
отстоять от оси частот на 12-16 дБ.
Вторая граница
желаемого расположения ЛАЧХ разомкнутой
системы (граница робастности) формируется
в соответствии с требованиями
помехоустойчивости. Это требование
обусловлено наличием помех и высокочастотных
шумов датчиков, измеряющих выходное
воздействие. Пусть шумы занимают спектр
частот, лежащий выше предельной частоты
![]() ,
заметно превышающий предельную частоту
,
заметно превышающий предельную частоту![]() спектра задающего воздействия. Амплитуда
сигнала шума на предельной частоте не
превышает значения
спектра задающего воздействия. Амплитуда
сигнала шума на предельной частоте не
превышает значения![]() .
Допустимая ошибка по шуму равна
.
Допустимая ошибка по шуму равна![]() .
.
Условие малого влияния шума на измеряемую величину можно записать в виде:
 ,
,
![]() .
.
В этом случае верхняя предельно допустимая граница робастности, называемая также границей помехоустойчивости, определится:
 ,
,
![]() .
.
Для того, чтобы проектируемая система подавляла в достаточной степени шум, ее ЛАЧХ должна проходить не выше границы помехоустойчивости на частотах измерения шума. Чем меньшие значения принимает ЛАЧХ системы в области высоких частот, тем меньшее влияние на управляемую величину оказывают шумы и тем выше робастность (грубость) системы.
Литература
1. Попов Э.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1989.-304 с.
2. Щербина Г.С., Егоров О.П., Потап О.Е., Кирсанов В.В. Теория автоматического управления. Линейные непрерывные АСУ. Учебное пособие.- Днепропетровск, НМетАУ, 2007.-90 с.
3. Медведев В.С., Потемкин В.Г. Control System Toolbox. Mathlab 5 для студентов.- М.: Диалог-МИФИ, 1999.-287 с.
4. Mathcad: математический практикум для экономистов и инженеров: Учеб. пособие. - М.: Финансы и статистика, 1999.-656 с.
5. Зворыкин В.Б. Системы подчиненного управления электроприводами постоянного тока (часть I). Учеб. пособие. - Днепропетровск: НМетАУ, 2003.-96 с.
6. Зворыкин В.Б. Системы подчиненного управления электроприводами постоянного тока (часть II). Учеб. пособие. - Днепропетровск: НМетАУ, 2003.-91 с.
7. Кухтенко А.И. Проблема инвариантности в автоматике.- К.: ДТВЦ, 1963. 376 с.
Содержание
|
|
|
Стр. |
|
|
Введение |
3 |
|
1. |
Принципы построения, методы анализа и синтеза линейных систем автоматического управления. |
5 |
|
1.1. |
Основные понятия и определения |
5 |
|
1.2. |
Принципы автоматического управления |
10 |
|
1.2.1. |
Управление по отклонению |
10 |
|
1.2.2. |
Управление по возмущению |
12 |
|
1.2.3. |
Комбинированное управление |
13 |
|
2. |
Понятие передаточной функции |
14 |
|
3. |
Частотные характеристики систем регулирования и ее элементов |
17 |
|
4. |
Показатели качества систем автоматического управления |
26 |
|
4.1. |
Оценка качества регулирования при стандартных воздействиях |
26 |
|
4.2. |
Корневые критерии качества |
30 |
|
4.3. |
Частотные оценки качества |
33 |
|
5. |
Структурные схемы систем автоматического управления |
37 |
|
5.1. |
Элементы структурных схем |
37 |
|
5.2. |
Преобразование структурных схем |
38 |
|
5.2.1. |
Последовательное соединение звеньев |
39 |
|
5.2.2. |
Параллельное соединение звеньев |
39 |
|
5.2.3. |
Звено, охваченное отрицательной обратной связью |
40 |
|
5.2.4. |
Перенос звеньев |
41 |
|
6. |
Типовые звенья систем автоматического управления |
42 |
|
6.1. |
Апериодическое звено первого порядка |
43 |
|
6.1.1. |
Временнные характеристики звена первого порядка |
43 |
|
6.1.2. |
Частотные характеристики звена первого порядка |
46 |
|
6.2. |
Пропорциональное звено |
50 |
|
6.3. |
Интегрирующее звено |
52 |
|
6.4. |
Дифференцирующее звено |
54 |
|
6.5. |
Звено чистого запаздывания |
56 |
|
6.6. |
Звено второго порядка |
57 |
|
6.6.1. |
Характеристики звена второго порядка |
57 |
|
6.6.2. |
Пример звена второго порядка |
61 |
|
7. |
Статический режим работы системы автоматического управления |
67 |
|
7.1 |
Статическая ошибка по управлению и возмущению |
67 |
|
7.2 |
Выбор типа регулятора |
72 |
|
8. |
Устойчивость линейных систем автоматического управления |
75 |
|
8.1. |
Понятие устойчивости |
75 |
|
8.2. |
Критерий Найквиста |
77 |
|
8.3. |
Понятие запаса устойчивости |
79 |
|
8.4. |
Анализ устойчивости по ЛЧХ |
80 |
|
9. |
Расчет регуляторов в системах подчиненного регулирования |
84 |
|
9.1. |
Общие сведения |
84 |
|
9.2. |
Настройка контура регулирования на модульный оптимум |
85 |
|
9.3. |
Особенности настройки контуров регулирования |
90 |
|
9.3.1. |
Объект регулирования в виде колебательного звена |
90 |
|
9.3.2. |
Интегрирующее звено в составе регулятора |
91 |
|
9.3.3. |
Интегрирующее звено в составе объекта регулирования |
92 |
|
9.3.4. |
Двукратно интегрирующая система регулирования |
94 |
|
10. |
Расчет регуляторов линейных САУ по логарифмическим частотным характеристикам |
98 |
|
10.1. |
Принципы расчета регуляторов |
98 |
|
10.2. |
Расчет и моделирование линейных САУ |
99 |
|
10.2.1. |
Расчет параметров регулятора и моделирование переходных процессов в контуре управления положением задвижки |
104 |
|
10.2.2. |
Расчет параметров регулятора и моделирование переходных процессов в контуре управления высотой воды в баке |
110 |
|
11. |
Расчет и моделирование САУ с запаздыванием |
115 |
|
11.1. |
Общие сведения о ленточном дозаторе |
115 |
|
11.2. |
Расчет и моделирование САУ ленточного дозатора |
118 |
|
11.2.1. |
Расчет параметров регулятора и моделирование переходных процессов в контуре управления положением заслонки |
122 |
|
11.2.2. |
Расчет параметров регулятора и моделирование переходных процессов в контуре управления заполнением смесителя |
128 |
|
11.2.3. |
Оптимизация параметров в условиях неопределенности |
133 |
|
12. |
Разработка замкнутых систем регулирования (метод желаемой ЛАЧХ) |
135 |
|
|
Литература |
141 |