

6.3. Интегрирующее звено
Уравнение интегрирующего звена:
|
|
(6.34) |
 .
.Передаточная функция звена
|
|
(6.35) |
 .
.Примером такого звена является усилитель постоянного тока с конденсатором в цепи обратной связи (рис. 6.9).
Р исунок
6.9 - Интегратор на базе операционного
усилителя
исунок
6.9 - Интегратор на базе операционного
усилителя
Коэффициент передачи для такой электрической схемы определяется выражением:
|
|
(6.36) |
 .
.
Если, на вход
интегратора подать единичный ступенчатый
сигнал ![]() ,
то выходной сигнал будет изменяться в
соответствии с выражением:
,
то выходной сигнал будет изменяться в
соответствии с выражением:
|
|
(6.37) |
 .
.Переходная характеристика звена изображена на рис. 6.10.
Р исунок
6.10 - График переходной характеристики
интегрирующего звена
исунок
6.10 - График переходной характеристики
интегрирующего звена
Частотные функции звена:
|
|
(6.38) |
|
|
(6.39) |
|
|
(6.40) |
|
|
(6.41) |
|
|
(6.42) |
|
|
(6.43) |
 .
. .
. .
. .
.
Графики ЛАЧХ и
ЛФЧХ при изменении
![]() от 0 до 10
от 0 до 10![]() и значении
и значении![]() ,
изображены на рис. 6.11.
,
изображены на рис. 6.11.
Р исунок
6.11 - ЛАЧХ и ЛФЧХ интегрирующего звена
исунок
6.11 - ЛАЧХ и ЛФЧХ интегрирующего звена
![]() представляет собой
прямую, имеющую наклон минус 20 дБ/дек.
Действительно, при увеличении
представляет собой
прямую, имеющую наклон минус 20 дБ/дек.
Действительно, при увеличении
![]() на декаду, т.е. в десять раз,
на декаду, т.е. в десять раз,
![]() .
.
Таким образом,
величина
![]() уменьшилась на
уменьшилась на![]() ,
т.е. на 20 дБ.
,
т.е. на 20 дБ.
Запаздывание по
фазе выходного сигнала
 .
.
6.4. Дифференцирующее звено
Уравнение дифференцирующего звена:
|
|
(6.44) |
 .
.Передаточная функция звена
|
|
(6.45) |
Примером такого звена является усилитель постоянного тока с конденсатором в цепи задания (рис. 6.12).
Р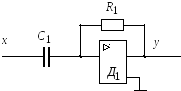 исунок
6.12 -Дифференцирующее
звено
на базе операционного усилителя
исунок
6.12 -Дифференцирующее
звено
на базе операционного усилителя
Коэффициент передачи для такой электрической схемы определяется выражением:
|
|
(6.46) |
Если, на вход
дифференцирующего звена подать линейно
нарастающий сигнал
![]() ,
то выходной сигнал будет изменяться в
соответствии с выражением:
,
то выходной сигнал будет изменяться в
соответствии с выражением:
|
|
(6.47) |
 .
.Переходная характеристика звена изображена на рис. 6.13.
Р исунок
6.13 - График переходной характеристикидифференцирующего
звена
исунок
6.13 - График переходной характеристикидифференцирующего
звена
Выходная величина звена пропорциональна скорости изменения входной величины.
Частотные функции звена:
|
|
(6.48) |
|
|
(6.49) |
|
|
(6.50) |
|
|
(6.51) |
|
|
(6.52) |
|
|
(6.53) |
 .
.Графики ЛАЧХ и
ЛФЧХ при изменении
![]() от 0 до 10
от 0 до 10![]() и значении
и значении![]() ,
изображены на рис. 6.14.
,
изображены на рис. 6.14.
Р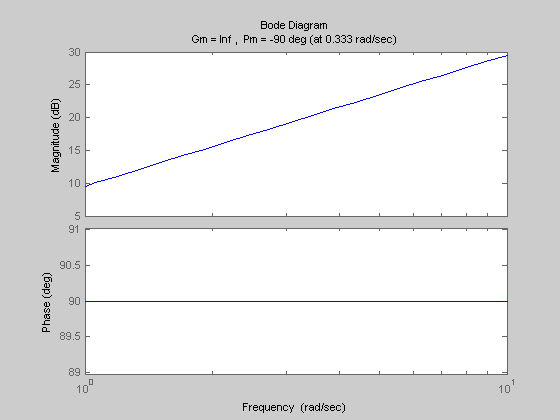 исунок
6.14 - ЛАЧХ и ЛФЧХдифференцирующего
звена
исунок
6.14 - ЛАЧХ и ЛФЧХдифференцирующего
звена
![]() представляет собой
прямую, имеющую наклон плюс 20 дБ/дек.
Действительно, при увеличении
представляет собой
прямую, имеющую наклон плюс 20 дБ/дек.
Действительно, при увеличении
![]() на декаду, т.е. в десять раз,
на декаду, т.е. в десять раз,
![]() .
.
Таким образом,
величина
![]() увеличилась на
увеличилась на![]() ,
т.е. на 20 дБ.
,
т.е. на 20 дБ.
Запаздывание по
фазе выходного сигнала
 .
.
Как передаточная функция, так соответственно и частотные характеристики дифференцирующего звена зеркально отражают передаточную функцию и соответствующие частотные характеристики интегрирующего звена.
Идеальное дифференцирующее звено реализовать невозможно, так как величина всплеска выходной величины при подаче на вход единичного ступенчатого воздействия всегда ограничена. На практике используют реальные дифференцирующие звенья, обладающие инерционностью, вследствие чего осуществляемое ими дифференцирование является приближенным. Передаточная функция такого звена:
|
|
(6.54) |
 .
.
При достаточно
малых
![]() звено можно
рассматривать как идеальное
дифференцирующее.
звено можно
рассматривать как идеальное
дифференцирующее.