

11.2. Расчет и моделирование сау ленточного дозатора
Рассмотрим процесс
поступления в смеситель сыпучего
материала массой
![]() кг. Длина конвейера
кг. Длина конвейера![]() м, скорость движения ленты
м, скорость движения ленты![]() м/мин. В этом случае передаточные функции
модели системы имеют вид.
м/мин. В этом случае передаточные функции
модели системы имеют вид.
Задание частоты вращения двигателя:
 .
.(11.12)
Передаточная функция преобразователя и двигателя:
 .
.(11.13)
Передаточная функция заслонки:
 .
.(11.14)
Передаточная функция транспортера:
|
|
(11.15) |
 ,
,
где
 с - транспортное запаздывание.
с - транспортное запаздывание.
На рис. 11.3 представлена структурная схема бункера с заслонкой.
Р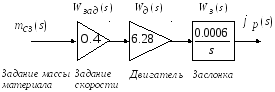 исунок
11.3 - Структурная схемабункера
с заслонкой
исунок
11.3 - Структурная схемабункера
с заслонкой
Эквивалентная передаточная функция бункера с заслонкой (рис. 11.3):
|
|
(11.16) |
 .
.
На графике
переходного процесса в бункера с
заслонкой (рис. 11.4) видно, что заслонка
полностью открывается за время
![]() с.
с.
Р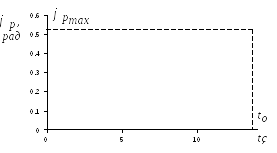 исунок
11.4 - График переходного процесса вбункере с
заслонкой
исунок
11.4 - График переходного процесса вбункере с
заслонкой
На рис. 11.5 приведена структурная схема модели заполнения смесителя сыпучим материалом при полностью открытой заслонке, а на графике 11.6 - переходной процесс заполнения смесителя сыпучим материалом при полностью открытой заслонке.
Р исунок
11.5 - Структурная схема моделизаполнения
смесителя сыпучим материалом при
полностью открытой заслонке
исунок
11.5 - Структурная схема моделизаполнения
смесителя сыпучим материалом при
полностью открытой заслонке
Р исунок
11.6 - Переходной процесс заполнениясмесителя
сыпучим материалом при полностью
открытой заслонке
исунок
11.6 - Переходной процесс заполнениясмесителя
сыпучим материалом при полностью
открытой заслонке
Из рис. 11.6 следует,
что время заполнения смесителя сыпучим
материалом массой
![]() кг при транспортном запаздывании
кг при транспортном запаздывании![]() и полностью открытой заслонке составляет
550 с.
и полностью открытой заслонке составляет
550 с.
Если выполнить систему управления заполнением смесителя без регуляторов, то она будет неработоспособна, поскольку содержит цепочку последовательно соединенных интегрирующих звеньев (рис. 11.3, 11.5). Каждое звено сдвигает фазу на девяносто градусов, что в сумме дает сто восемьдесят градусов. Сдвиг фазы на сто восемьдесят градусов в замкнутой системе равнозначен введению положительной обратной связи.
Постановка задачи оптимизации заполнения смесителя сыпучим материалом. При заданных структурных схемах бункера с заслонкой (рис. 11.3) и смесителя (рис. 11.5) построить систему регулирования со следующими показателями качества:
перерегулирование отсутствует,
время полного открытия заслонки не должно превышать величины
 с,
с,время переходного процесса заполнения смесителя сыпучим материалом должно быть минимальным.
Выполним систему управления заполнением смесителя сыпучим материалом двухуровневой (рис. 11.7). Внутренний контур управляет положением заслонки, а внешний - заполнением смесителя.
Р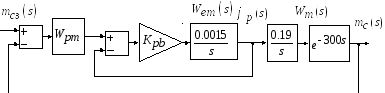 исунок
11.7 -Структурная
схема системы заполнения
смесителя сыпучим материалом при
полностью открытой заслонке
исунок
11.7 -Структурная
схема системы заполнения
смесителя сыпучим материалом при
полностью открытой заслонке
11.2.1. Расчет параметров регулятора и моделирование переходных процессов в контуре управления положением заслонки
В контуре управления положением заслонки применим регулятор в виде пропорционального звена, поскольку заслонка представлена интегрирующим звеном и в замкнутой системе регулирования статическая ошибка будет равна нулю. Структурная схема системы изображена на рис. 11.8.
Р исунок
11.8 -Структурная
схема контура управления положением
заслонки
исунок
11.8 -Структурная
схема контура управления положением
заслонки
Постановка задачи
оптимизации контура управления положением
заслонки. При заданной структуре объекта
управления ![]() найти значение коэффициента
найти значение коэффициента
![]() ,
который обеспечит в замкнутой системе
регулирования следующие показатели
качества:
,
который обеспечит в замкнутой системе
регулирования следующие показатели
качества:
перерегулирование отсутствует,
время регулирования не больше 15 с,
время переходного процесса не больше 20 с.
Построим Simulink-модель в соответствии со схемой, представленной на рис. 11.9.
Р исунок
11.9 - Модель контура управления положением
заслонки с оптимизатором
исунок
11.9 - Модель контура управления положением
заслонки с оптимизатором
Данная система представляет собой замкнутую структуру, которая состоит из следующих компонентов:
объект регулирования с передаточной функцией
 ,
которой в модели соответствуют интегратор
(блок Transfer Fcn);
,
которой в модели соответствуют интегратор
(блок Transfer Fcn);ПИД - регулятор (PID Controller из библиотеки Simulink Extract);
цепь обратной связи и узел сравнения.
В модель также введены источник входного сигнала в виде единичного скачка (блок Step), осциллограф (блок Scope) и блок NCD Outport (Signal Constrain) из библиотеки NCD Blockset, подключенный к выходу системы. Блок NCD Outport (Signal Constrain) предназначен для настройки ПИД - регулятора.
Инициализируем в
командном окне Matlab переменные
![]() и зададим начальные параметры блока
PID Controller (рис. 11.10), вводя в поле параметра
Proportional переменную
и зададим начальные параметры блока
PID Controller (рис. 11.10), вводя в поле параметра
Proportional переменную![]() ,
в поле Integral -
,
в поле Integral -![]() ,
а в поле Derivative -
,
а в поле Derivative -![]() .
.
Р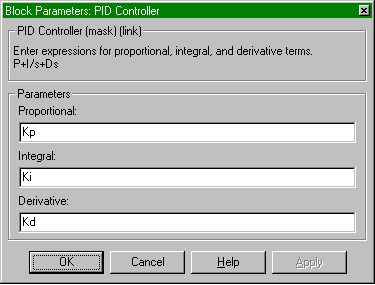 исунок
11.10 - Предварительная настройка параметров
блока PID Controller
исунок
11.10 - Предварительная настройка параметров
блока PID Controller
Таким образом, сформирована Simulink-модель объекта управления, и теперь можно приступить к заданию ограничений, которые накладываются на выход системы.
Дважды щелкнув по блоку NCD Outport, откроем окно, представленное на рис. 11.11.
Р исунок
11.11 - Рабочее окно блока NCD Outport
исунок
11.11 - Рабочее окно блока NCD Outport
Установим коридор, в пределах которого должен находиться выходной сигнал (блок NCD Outport), в соответствии с требованиями задания. Это можно сделать, передвигая границы коридора, с помощью мыши. Местоположение этих линий можно установить точно (не в визуальном режиме) с помощью диалоговой панели Constraint Editor, которая появляется при нажатии правой кнопки мыши по линии или при выборе пункта меню Edit>Edit Constraint (рис. 11.12).
Р исунок
11.12 - Диалоговая панель Constraint Editor
исунок
11.12 - Диалоговая панель Constraint Editor
После задания границ коридора окно должно выглядеть так, как показано на рис. 11.13.
Р исунок
11.13 - Рабочее окно блока NCD Outport
исунок
11.13 - Рабочее окно блока NCD Outport
Далее
выбираем
пункт
меню
Optimization>Parameters. При
этом открывается окно (рис. 11.14).
Поскольку предполагается настраивать
только пропорциональную часть регулятора,
в поле Tunable Variables задается имя переменной
![]() .
В этом окне также изменим значение поля
Discretization interval на 0.5 и поставим "галочку"
напротив поля Stop optimization as soon as the
constraints are achieved (прекратить процесс
оптимизации после того, как выполнены
все ограничения). После внесения указанных
изменений нажимаем кнопку Done.
.
В этом окне также изменим значение поля
Discretization interval на 0.5 и поставим "галочку"
напротив поля Stop optimization as soon as the
constraints are achieved (прекратить процесс
оптимизации после того, как выполнены
все ограничения). После внесения указанных
изменений нажимаем кнопку Done.
Р исунок
11.14 - Настройка параметров оптимизации
и интервала дискретизации
исунок
11.14 - Настройка параметров оптимизации
и интервала дискретизации
Теперь все готово для начала процесса оптимизации. Нажимаем на кнопку Start и наблюдаем за процессом. Поиск иллюстрируется начальной и конечной формами переходного процесса, представленными на рис. 11.15. В командном окне MATLAB отображается информация о ходе оптимизации.
Р исунок
11.15 - Ограничения, которые отвечают
условиям задачи, и переходная функция
контура регулирования положения залонки
исунок
11.15 - Ограничения, которые отвечают
условиям задачи, и переходная функция
контура регулирования положения залонки
Как следует из
рис. 11.15, оптимизированная переходная
характеристика при
![]() полностью
отвечает заданным ограничениям.
полностью
отвечает заданным ограничениям.
По окончании процесса оптимизации, оптимальные значения настраиваемых переменных, соответствующие окончательной кривой, сохраняются в рабочем пространстве MATLAB. Полученные оптимальные величины можно увидеть, набрав в командной строке имя нужного параметра.
Структурная схема модели системы управления положением заслонки с оптимизированным коэффициентом усиления изображена на рис. 11.16.
Р исунок
11.16 -Структурная
схема оптимизированного контура
управления положением заслонки
исунок
11.16 -Структурная
схема оптимизированного контура
управления положением заслонки