

6.1.2. Частотные характеристики звена первого порядка
Комплексный коэффициент усиления для передаточной функции (6.2) определяется как:
|
|
(6.19) |
 .
.
Для построения
графика комплексного коэффициента
усиления воспользуемся пакетом Matlab
[3]. Зададим передаточную функцию (6.19),
введя в командной строке следующую
запись
![]() .
При правильной записи на экране появится
передаточная функция указанного звена.
После этого набираем команду
.
При правильной записи на экране появится
передаточная функция указанного звена.
После этого набираем команду![]() .
График комплексного коэффициента
усиления будет изображен в отдельном
окне. Чтобы не показывать на графике
отрицательные частоты надо в контекстном
меню выбрать пункты
.
График комплексного коэффициента
усиления будет изображен в отдельном
окне. Чтобы не показывать на графике
отрицательные частоты надо в контекстном
меню выбрать пункты![]() ,
,![]() .
.
Для значений
![]() ,
,![]() с
график АФХ представлен на рис. 6.2.
с
график АФХ представлен на рис. 6.2.
Р исунок
6.2 - Частотный годограф комплексного
коэффициента усиления (диаграмма
Найквиста)
исунок
6.2 - Частотный годограф комплексного
коэффициента усиления (диаграмма
Найквиста)
АФХ представляет
собой полуокружность с радиусом
![]() в четвертом квадранте комплексной
плоскости и центром в точке
в четвертом квадранте комплексной
плоскости и центром в точке на действительной оси.
на действительной оси.
Для построения
логарифмической амплитудно-частотной
и логарифмической фазовой частотной
характеристик введем команду
![]() .
.
ЛАЧХ в соответствии с уравнением (3.19):
|
|
(6.20) |
 .
.ЛФЧХ описывается уравнением (3.15):
|
|
(6.21) |
Для значений
![]() ,
,![]() с
в пакете Matlab построены ЛАЧХ и ЛФЧХ (рис.
6.3).
с
в пакете Matlab построены ЛАЧХ и ЛФЧХ (рис.
6.3).
Р исунок
6.3 - Графики ЛАЧХ и ЛФЧХ
исунок
6.3 - Графики ЛАЧХ и ЛФЧХ
При частоте
![]() получим значение, соответствующее
установившемуся режиму:
получим значение, соответствующее
установившемуся режиму:
 .
.
При больших частотах
![]() .
В этом случае
.
В этом случае![]() .
.
Выражение для ЛАЧХ приобретает вид:
|
|
(6.22) |
В этом случае
![]() представляет
собой прямую, имеющую наклон минус 20
дБ/дек. Действительно, при увеличении
представляет
собой прямую, имеющую наклон минус 20
дБ/дек. Действительно, при увеличении
![]() на декаду, т.е. в десять раз,
на декаду, т.е. в десять раз,
![]() .
.
Таким образом,
величина
![]() уменьшилась на
уменьшилась на![]() ,
т.е. на 20 дБ.
,
т.е. на 20 дБ.
При
![]() значение
значение![]() изменяется от
изменяется от![]() до
до![]() .
В точке
.
В точке фазовый сдвиг приобретает значение
фазовый сдвиг приобретает значение .
.
Для получения АЧХ
и ФЧХ надо из контекстного меню выбрать
пункт
![]() .
Открыть вкладку
.
Открыть вкладку![]() (рис. 6.4). Свойства осей следует перевести
из логарифмического масштаба в обычный
масштаб, как показано на рис. 6.4, а, б.
(рис. 6.4). Свойства осей следует перевести
из логарифмического масштаба в обычный
масштаб, как показано на рис. 6.4, а, б.
|
|
|
|
а – логарифмический масштаб осей |
б – обычный масштаб осей |


Рисунок 6.4 - Вкладка
![]()
После изменения
масштаба осей на графиках будут изображены
АЧХ и ФЧХ для значений
![]() ,
,![]() (рис.
6.5).
(рис.
6.5).
Р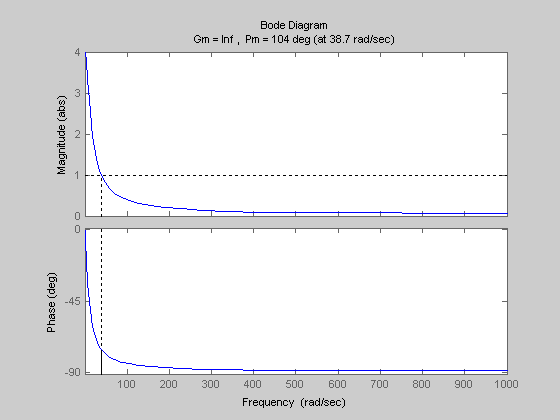 исунок
6.5 - Графики АЧХ и ФЧХ
исунок
6.5 - Графики АЧХ и ФЧХ
6.2. Пропорциональное (усилительное) звено
Выходная величина
этого звена пропорциональная входной
величине
![]() .
Уравнение звена:
.
Уравнение звена:
|
|
(6.23) |
где
![]() - коэффициент усиления звена.
- коэффициент усиления звена.
Передаточная функция звена
|
|
(6.24) |
Примером такого звена является усилитель постоянного тока (рис. 6.7).
Р исунок
6.6 - Усилитель на базе операционного
усилителя
исунок
6.6 - Усилитель на базе операционного
усилителя
Коэффициент
усиления
![]() равняется:
равняется:
|
|
(6.25) |
 .
.Предполагается, что передача сигнала от входа звена к выходу звена осуществляется мгновенно (безинерционно). Поэтому пропорциональные звенья называют безинерционными.
Если, на вход
пропорционального звена подать единичный
ступенчатый сигнал ![]() ,
то выходной сигнал будет изменяться в
соответствии с выражением:
,
то выходной сигнал будет изменяться в
соответствии с выражением:
|
|
(6.26) |
Переходная характеристика звена изображена на рис. 6.7.
Р исунок
6.7 - График переходной характеристики
интегрирующего звена
исунок
6.7 - График переходной характеристики
интегрирующего звена
Частотные функции звена:
|
|
(6.28) |
|
|
(6.29) |
|
|
(6.30) |
|
|
(6.31) |
|
|
(6.32) |
|
|
(6.33) |
 .
.
Графики ЛАЧХ и
ЛФЧХ для пропорционального звена при
изменении
![]() от 0 до 10
от 0 до 10![]() и
и![]() приведены на рис. 6.8.
приведены на рис. 6.8.
Р исунок
6.8 - ЛАЧХ и ЛФЧХ пропорционального звена
исунок
6.8 - ЛАЧХ и ЛФЧХ пропорционального звена
Как и следовало ожидать, запаздывание по фазе выходного сигнала отсутствует.