

Перша інтерполяційна формула Гауса:
|
де m=2i-1, |
|
q=(x-x0)/h. |
 ,
,Друга інтерполяційна формула Гауса:

Формули Гауса застосовуються для інтерполяції в середині таблиці поблизу x0. При цьому перша формула застосовується приx>x0(тобто вправо), а друга – приx<x0(вліво).
Інтерполяційна формула Стірлінга
Ця формула являє середнє арифметичне першої та другої формул Ньютона, і одночасно середнє арифметичне першої та другої формул Гаусса:
|
де m=2i-1, |
|
q=(x-x0)/h. |
 ,
,
Тут
варто зауважити, що, коли вузлів непарна
кількість, вони нумеровані як
x-n,
x-n+1,
..., x–2,
x–1,
x0,
x1,
x2,
..., x-n-1,
x-n,
а також що перший доданок під знаком
суми містить
![]() ,
що приi=1
дає
,
що приi=1
дає
![]() – пустий множник, у якого верхня межа
менша за нижню, тобто він заміняється
одиницею.
– пустий множник, у якого верхня межа
менша за нижню, тобто він заміняється
одиницею.
Формула застосовується для інтерполяції в середині таблиці при значеннях q, близьких до нуля. Практично її використовують при |q| 0.25.
Інтерполяційна формула Бесселя
 ,
де m=2i-1,
q=(x-x0)/h,
нумерація
x-n,
x-n+1,
..., x–2,
x–1,
x0,
x1,
x2,
..., x-n-1,
x-n.
,
де m=2i-1,
q=(x-x0)/h,
нумерація
x-n,
x-n+1,
..., x–2,
x–1,
x0,
x1,
x2,
..., x-n-1,
x-n.
Формула Бесселя використовується для інтерполяції в середині таблиці при значеннях q, близьких до 0.5. Практично вона використовується при 0.25q0.75. Найбільш простий вид має формула при q=0.25, тому що всі члени, що містять різниці непарного порядку, зникають. Формулу використовують для ущільнення таблиць, тобто для складання таблиць з дрібнішим кроком.
Інтерполяція для випадку довільних вузлів. Інтерполяційна формула Лагранжа
Нехай xi – довільні вузли (i=0, 1, 2, ..., n), а yi=f(xi) – відповідні значення функції. Багаточленом ступеня n, приймаючим в точках xi значення yi, є інтерполяційний поліном Лагранжа:
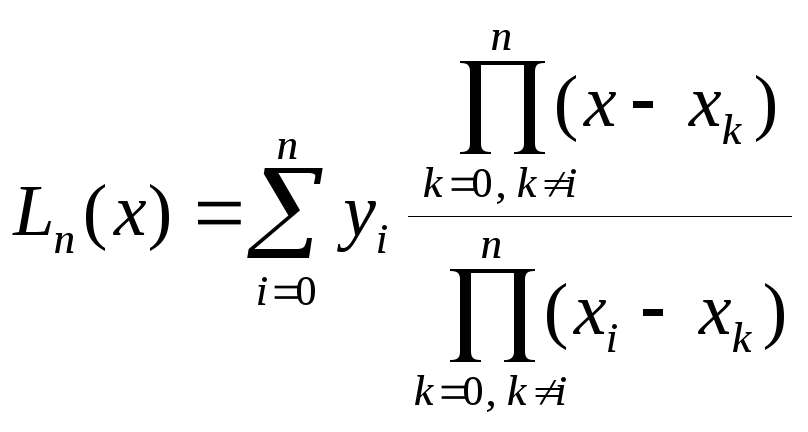 .
.
Зворотна інтерполяція – це процес знаходження значень x по заданим значенням y. Вона може здійснюватись по будь-якій програмі інтерполяції з довільно розташованими вузлами. При цьому просто замість значень xі вводять yі, а замість yі – значення xі.
Лекція 8-9. МЕТОДИ РОЗВ’ЯЗАННЯ СИСТЕМ
Лінійних алгебраїчних рівнянь.
Розглянемо чисельні методи розв’язання систем лінійних алгебраїчних рівнянь
Ax=f (1)
де A - матриця m*m, x = ( x1, x2 , ... ,xm ) - шуканий вектор,
f =(f1, f2, ... , fm) -заданий вектор.
Припускаємо,
що
![]() та
визначник матриці А відмінний від нуля, так що
існує єдиний розв’язок х. З курсу алгебри відомо,щосистему (1) можна розв’язати за
формулами Крамера*. Для великих mцей спосіб практично
нереалізований тому, що
потребує порядку m!aрифметичних
дій. Тому широко використовуються інші
методи розв’язання,
наприклад,метод Гаусса**,
який потребує
та
визначник матриці А відмінний від нуля, так що
існує єдиний розв’язок х. З курсу алгебри відомо,щосистему (1) можна розв’язати за
формулами Крамера*. Для великих mцей спосіб практично
нереалізований тому, що
потребує порядку m!aрифметичних
дій. Тому широко використовуються інші
методи розв’язання,
наприклад,метод Гаусса**,
який потребує
![]() дій.
дій.
Методи чисельного розв’язання системи (1) поділяються на дві групи:
-прямі методи;
-ітераційні методи.
У прямих (або точних) методах розв’язок x системи (1) відшукується за скінченну кількість арифметичних дій.Внаслідок похибок заокруглення прямі методи насправді не приводять до точного розв’язку системи (1) і назвати їх точними можливо лише залишаючи осторонь похибки заокруглення.
Ітераційні
методи (їх також називають
методами послідовних
наближень) полягають
у тому, що розв’язок x
системи (1) відшукується
як границя при
![]() послідовних наближень
послідовних наближень![]() деn- номер
ітерації. Як правило, за скінченну
кількість ітерацій ця границя не
досягається.
деn- номер
ітерації. Як правило, за скінченну
кількість ітерацій ця границя не
досягається.