

8.2. Генераторний режим
Генератори постійного струму бувають: незалежного, паралельного та змішаного збудження. Обертання якоря у магнітному полі ( будь-то двигун або генератор ) завжди викликає у його обмотках ЕРС. Вона пропорційна магнітному потоку Ф, та пропорційна кутової швидкості
Е = kФW.
Магнітний потік залежить від струму
збудження
![]() ,
а кутова швидкість –від швидкості
обертання якоря первинним двигуном.
,
а кутова швидкість –від швидкості
обертання якоря первинним двигуном.
Характеристика холостого ходу( рис.8.2 ) – це залежність ЕРС генератора від струму збудження, тобтоE ( Iз ). Вона показує як регулювати ЕРС та напругу генератора.

Рис. 8.2. Характеристика холостого ходу генератора постійного струму.
Зовнішні характеристики ( рис. 8.3 ) – це залежності напруги на затискачах генератораU від струму навантаженняІпри струмі збудженняІз = const та кутової швидкостіW = const. Ця характеристика згідно другого закону Кірхгофа для якірного кола має рівняння
U = E –RяІя .
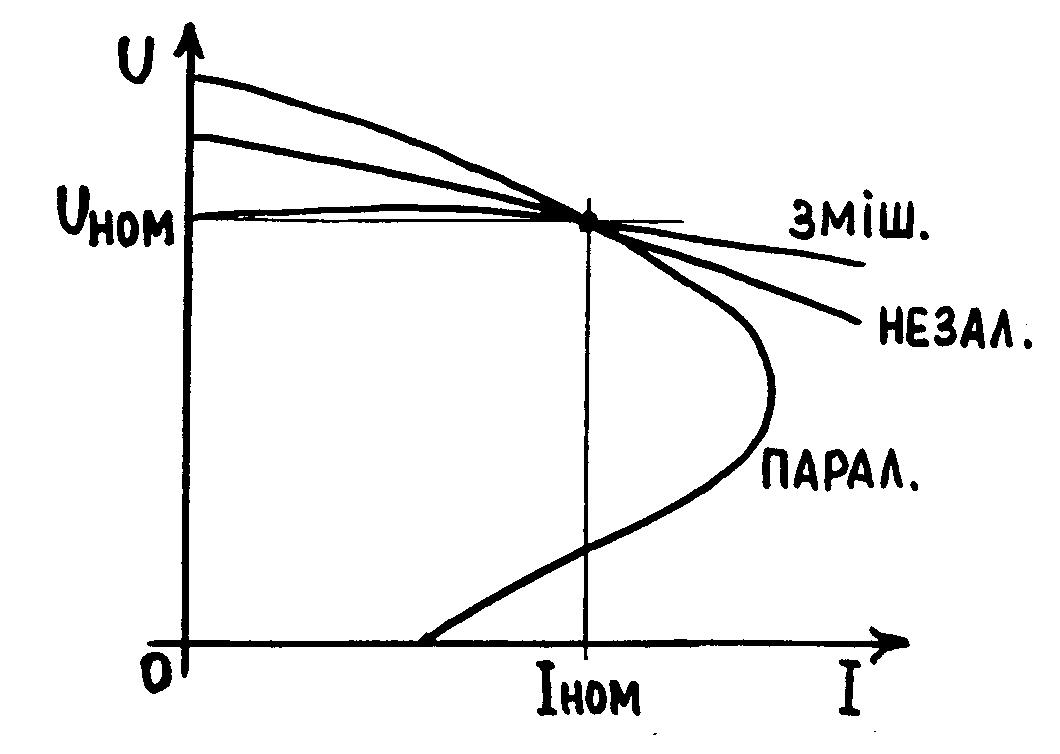
Рис. 8.3. Зовнішні характеристики генераторів постійного струму.
Зверніть увагу на струми короткого замикання генератора при U= 0.
Генератор паралельного збудження не страшиться короткого замикання. Якщо звернути увагу на спад напруги DU, то видно, що генератор змішаного струму має малий спад напруги.
Регулювальна характеристика( рис. 8.4 ) – це залежність струму збудженняІз від струму навантаження, тобтоІз ( І )приU=const, W = const. Вона показує як треба регулювати струм збудження щоб напруга генератора не змінювалася.

Рис. 8.4. Регулювальна характеристика генератора постійного струму
незалежного збудження.
8.3. Режим двигуна
Двигуни бувають: паралельного, послідовного та змішаного збудження.
Пуск.Оскільки опір якоря дуже малий, при пуску двигуна безпосередньо від мережі виникає великий пусковий струм. Для зменшення пускового струму у коло якоря обов’язково вмикають пусковий резисторRд, завдяки якому
![]() = ( 2…2,5 ) Іном
.
= ( 2…2,5 ) Іном
.
Без пускового резистора машина згорить.
Основні рівняння
Для ЕРС – E = kФW ;
для обертового моменту на валу двигуна М = kФІя ;
для напруги мережі – U = E+( Rя+Rд )Ія ;
для
струму якоря ![]() ;
;
для
кутової швидкості –
![]()
В цих рівняннях k – коефіцієнт пропорційності; Ф – магнітний потік; Rя та Rд – опір якоря та пускового ( або додаткового ) резистора.
Задача 8.1
Визначити
початковий пусковий струм двигуна
постійного струму паралельного збудження
при ввімкненому в колі якорі пускового
реостата з опором Rд=24
Ом, якщо напруга мережі U=100
В, а опір якоря
![]() Ом.
Ом.
Розв’язання
Пусковий
струм
![]() 4 А, а без пусового реостата
4 А, а без пусового реостата![]() 100
А, тому при пуску обовязково
вмикають пусковий реостат.
100
А, тому при пуску обовязково
вмикають пусковий реостат.
Робочі характеристики
Робочі характеристики для двигуна паралельного збудження представлені на рис. 8.5.

Рис. 8.5. Робочі характеристики двигуна постійного струму
паралельного збудження.
На цих характеристиках Р2 = МW – корисна потужність на валу двигуна. ПриPном визначають номінальні параметри двигуна.
Реверсування
З рівняння моменту двигуна М = kФІя видно, що для зміни знака обертаючого моменту необхідно змінити напрям струму в обмотці збудження, або в обмотці якоря. Частіше змінюють напрям струму в обмотці якоря.
Регулювання кутової швидкості
З
рівняння
![]() випливають три способи:
випливають три способи:
– полюсне регулювання, тобто Ф = var ( трохи зменшують магнітний потік Ф, при цьому збільшується швидкість );
– реостатне, тобто Rд = var ( Rд повинно бути розраховано на тривалий режим роботи, при цьому методі будемо мати малий h );
– якірне, тобто U = var, частіше користуються саме цім засобом.
9. Електропривод
Це електромашинний пристрій, який складається з електродвигуна (або декількох двигунів), передавального механізму до робочої машини та всієї апаратури для керування електроприводом .
Електроприводи бувають керовані та некеровані; групові, індивідуальні та багато двигунові.
9.1. Вибір двигуна для електропривода
При проектуванні електроприводів обирають :
струм – змінний або постійний; якщо не треба регулювати швидкість, то можна використовувати асинхронні двигуні;
швидкість – мало швидкісні або багато швидкісні; багато швидкісні двигуни мають кращі енергетичні показники, але треба мати на увазі , що двигуну з більшою швидкістю потрібен коштовний передавальний механізм ;
конструкцію (по ступеню захисту є двигуни ІР23, ІР44, ІР54); обирають за умовами навколишнього середовища;
потужність двигуна; вона залежить від режиму роботи, яку визначають по навантажувальній діаграмі P(t).
Основні режими: тривалий; короткочасний; повторнокороткочасний.
Основні умови вибору потужності двигуна:
при роботі двигун не повинен перегріватися більш граничної температури , яка залежить від класу ізоляції;
двигун повинен задовольняти умовам перевантаження та пускового моменту.