

зеленов / eletsehomt48
.pdfчих машин МС=f(ω), определения и классификация которых были даны ранее при изучении механики электропривода.
В уравнении движения электропривода ( М − МС = = J ddtω ) М – это вращающий момент на валу двигателя, а в
соответствии с приведенным выше определением М – это электромагнитный момент двигателя (МЭЛ.М). М и МЭЛ.М отличаются друг от друга на величину М – момента потерь (потери в подшипниках электродвигателя, вентиляционные потери и потери в стали электродвигателя).
Эти потери различным образом компенсируются в двигательном или генераторных режимах работы электропривода. В общем случае
М = М ЭЛ .М m М ,
где знак «-» относится к двигательному режиму (потери компенсируются за счет энергии, забираемой из питающей сети);
«+» относится к генераторному режиму (потери компенсируются за счет энергии, поступающей с вала рабочей машины).
|
ω |
|
|
|
Таким |
||
|
|
образом, |
при |
||||
ω0 |
|
|
|
|
|||
МЭЛ.М |
|
ω=0 |
механиче- |
||||
ω/0 |
|
ская |
характери- |
||||
|
|
|
|
||||
|
|
|
|
|
стика |
|
электро- |
|
|
|
М |
|
привода |
имеет |
|
|
|
|
|
разрыв |
непре- |
||
|
М |
М |
рывности на ве- |
||||
|
|
|
|
личину 2 М (см. |
|||
0 |
|
|
|
|
|||
|
|
|
|
||||
М |
|
М рис. 2.1). Поэто- |
|||||
|
|
|
|
|
му скорость ре- |
||
|
Рисунок 2.1 |
|
ального холосто- |
||||
|
|
|
|
|
|||
117

го хода ω’0 меньше, чем скорость ω0 идеального холостого хода.
Величина М в электродвигателях весь-ма мала
(доли процента). Поэтому в теории электропривода принято допущение о том, что М=МЭЛ.М.
Это допущение в дальнейшем изложении курса оговаривается больше не будет.
Все расчеты вращающих моментов на валу двигателя можно выполнять, приравнивая их к электромагнитным
моментам, т.е. полагая |
|
+ω |
|||||
|
Р |
|
|
II |
|||
|
|
= СФI . (2.1) |
I |
||||
|
|
= М ≈ Мэл.м |
|
|
|||
|
ω |
|
|
||||
|
|
|
Механические ха- |
Мω<0 |
|
||
рактеристики |
электро- |
Мω>0 |
|||||
привода изображаются в -М |
|
+М |
|||||
4-х квадрантной системе |
|
|
|||||
координат (см. рис. 2.2), |
Мω>0 |
Мω<0 |
|||||
по которой легко можно |
|||||||
|
|
||||||
судить |
об |
энергетиче- |
III |
IV |
|||
ском |
режиме работы |
||||||
электропривода. |
|
-ω |
|||||
|
|
|
При Мω > 0 - дви- |
Рисунок 2.2 |
|||
гательные режимы рабо- |
|||||||
ты;
при Мω < 0 - генераторные режимы работы. Введем следующие обозначения:
Р - мощность потерь; Рм - механическая мощность двигателя (то есть
мощность на его валу); Рэ - электромагнитная мощность двигателя (генера-
тора).
Для различных энергетических режимов работы электропривода будут справедливы следующие соотноше-
118
ния между Рэ , |
Рм , |
Р : |
Рм = Рэ − |
Р - двигательный режим работы; |
|
Рм + Рэ = |
Р |
- генераторный режим противовключе- |
ния; |
Р - генераторный режим рекуперативного |
|
Рэ = Рм − |
||
торможения, то есть торможения с отдачей энергии в сеть; Рм = Р - генераторный режим динамического тор-
можения.
Режимы торможения противовключением и динамическое торможение называется диссипативными видами торможения, то есть торможением с преобразованием энергии торможения в тепловую энергию, рассеиваемую в окружающую среду.
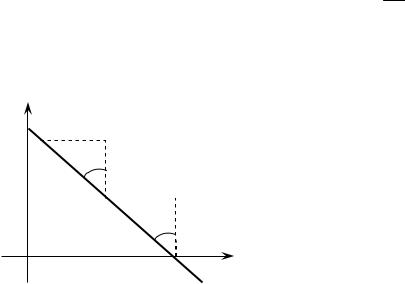
Жесткость механических характеристик электро-
привода. Сравнительная оценка механических характеристик проводится по так называемой жесткости их, кото-
рая определяется по коэффициенту жесткости β = dMdω ,
то есть по углу наклона γ механической характеристики, как это показано на рис. 2.3.
β = |
mM × |
M |
= |
mM |
||
|
|
|
|
|||
mω × |
ω |
mω |
||||
|
|
|||||
ω |
|
|
|
|
||
М |
|
|
|
|
||
γ Δω |
|
|
|
|
||
|
γ |
|
|
|
|
|
|
|
|
|
М |
||
Рисунок 2.3
tgγ ≡ tgγ ,
где mM и mω - масштабы моментов и скоростей по осям координат.
С точки зрения жесткости механические характеристики условно подразделяются на следующие (см. рис. 2.4):
- абсолютно же-
сткие (γ = 90 °,β=∞).
119

Примером могут служить механические характеристики синхронных двигателей;
- жесткие (при М=МН падение скорости ωН не более 10% от ω0 ). Такие характеристики имеют двигатели
постоянного тока с независимым возбуждением и рабочие участки естественных механических характеристик асинхронных двигателей. В этом случае β<0; β≈const;
|
- мягкие (Δω(Н)>0,1ω0, при М=МН). Это механиче- |
|||||||
|
ω |
β=∞ |
|
ские |
характери- |
|||
ω0 |
абс. жесткая |
стики |
электро- |
|||||
Δω(Н) |
жесткая |
двигателей с по- |
||||||
|
||||||||
|
ΔωН |
β=0 |
следовательным |
|||||
|
|
и |
смешенным |
|||||
|
|
абс. мягкая |
||||||
|
|
|
возбуждением, |
|||||
|
|
|
|
|
||||
|
|
мягкая |
|
искусственные |
||||
|
|
|
|
реостатные |
ха- |
|||
|
|
|
|
|
рактеристики |
|||
|
|
|
|
двигателей |
по- |
|||
|
|
М |
стоянного |
тока |
||||
|
МН |
всех типов, ра- |
||||||
|
|
|
бочие |
участки |
||||
|
Рисунок 2.4 |
|
|
|
искусственных |
|||
|
|
|
|
характеристик |
||||
|
|
|
|
|
||||
асинхронных двигателей;
- абсолютно мягкие (β=0, Μ=const). Это механические характеристики, получаемые в электроприводах с регулированием момента (тока) при помощи системы управления с обратными связями.
Деление механических характеристик электроприводов с точки зрения жесткости их весьма условно. Например, двигатели со смешенным возбуждением имеют мягкую механическую характеристику в области малых моментов и жесткую – при больших моментах на валу.
120

Механические характеристики рабочих машин (МС=f(ω)) также оцениваются по коэффициенту их жесткости βС = dMdωС .
Статическая устойчивость электропривода, то есть устойчивость его в установившихся режимах работы зависит от взаимного расположения механических характеристик двигателя и рабочей машины, от величины коэффициентов жесткости β и βС этих характеристик.
На рис. 2.5 и 2.6 показаны различные сочетания механических характеристик электродвигателя и рабочей машины с отрицательными и положительными значениями β и βС. В точке пересечения этих характеристик М=МС, то есть MJ=0, и имеет место установившийся режим работы электропривода.
Рассмотрим поведение электропривода при выведении его из состояния равновесия в точке «а» (точка пересечения механических характеристик) на рисунке 2.5.
При увеличении скорости (то есть при +Δω>0)
М< МС, MJ<0, |
dω |
< 0 , и электропривод начинает за- |
|||||||||||
dt |
|||||||||||||
|
|
|
|
|
|
|
медляться, |
стремясь |
|||||
ω |
|
М |
|
|
|||||||||
|
|
|
уменьшить |
ско- |
|||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
рость и вернуться в |
|||||
|
|
|
|
|
|
|
|
устойчивое |
состоя- |
||||
|
|
|
|
|
|
|
|
ние (точку «а»). |
|||||
|
|
|
|
а |
|
|
+Δω |
||||||
|
|
|
|
|
|
|
|
|
При |
умень- |
|||
|
|
|
|
|
|
|
-Δω |
|
|
|
|||
|
|
|
|
|
|
|
шении скорости (то |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
есть |
при |
-Δω<0) |
|||
|
МС |
|
|
|
М> МС, |
MJ>0, |
|||||||
|
|
|
|
dω |
, и |
электро- |
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
М |
|
> 0 |
|||
|
|
|
|
|
|
|
|
dt |
|||||
привод будет уско-
Рисунок 2.5
121

ряться, стремясь увеличить скорость и вернуться в устойчивое состояние (точку «а»). Таким образом, сочетание характеристик ω=f(М) и МС=f(ω), показанное на рис. 2.5, соответствует состоянию статической устойчивости электропривода.
Для условия равенства М и МС в точке «б» (рис.
2.6):
При +Δω>0, |
М> МС, |
|
МJ>0, |
dω |
> 0 , и электро- |
||||||||||
dt |
|||||||||||||||
привод |
|
начинаетω |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
ускоряться, |
стре- |
|
|
|
|
|
|
|
|
|
|
||||
мясь |
увеличить |
|
М |
|
|
|
|
|
|
||||||
скорость |
и |
уйти |
|
|
|
МС |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||
от |
положения |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
статической |
ус- |
|
|
|
|
|
|
|
|
|
|
||||
тойчивости, |
то |
|
|
|
|
|
|
|
|
|
|
||||
+Δω |
|
|
б |
|
|
|
|||||||||
есть электропри- |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||
вод |
статически |
-Δω |
|
|
|
|
|
|
|||||||
неустойчив; |
|
|
|
|
|
|
|
|
|
|
М |
||||
При |
|
|
|
|
|
|
|
|
|
|
|||||
-Δω<0, |
|
М< МС, |
|
|
|
|
|
|
|
|
|
|
|||
МJ<0, |
dω |
< 0 , и |
|
|
|
|
Рисунок 2.6 |
||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
||||
электропривод начинает замедляться, стремясь уменьшить скорость и уйти от положения статической устойчивости. В этом случае электропривод статически неустойчив.
Из приведенных выше пояснений следует, что при статической устойчивости электропривода должны быть противоположны знаки приращений Δω и МJ, возникающих при выведении электропривода из состояния равнове-
сия. При этом МJ= М- МС, где М=βΔω и МС=βСΔω.
Или МJ=Δω(β−βС).
Для устойчивого состояния электропривода, как
122

выяснено выше, при +Δω отрицательное значение МJ<0 будет в случае, когда β−βС<0, откуда следует, что условием статической устойчивости электропривода будет: β<βС.
Этот же результат можно получить, рассматривая работу механической части электропривода с позиций теории автоматического управления. Действительно, уравнение движения электропривода – это дифференциальное
уравнение первого порядка: |
|
|
||
М - МС = J |
dω |
= Jрω , |
(2.2) |
|
dt |
||||
|
|
|
||
где р – оператор дифференцирования по времени. Из (2.2) следует, что рω - J1 ( М - МС ) = 0 .
Дифференцируя это соотношение по ω, получим:
р - |
1 |
æ dМ |
- |
dМ |
С |
ö |
= 0 , р - |
|
1 |
( β - βС ) = 0 . |
|||
|
ç |
|
|
÷ |
|
|
|||||||
J |
dω |
dω |
|
J |
|||||||||
|
è |
|
ø |
|
|
|
|
||||||
Из этого выражения следует, что корень дифферен- |
|||||||||||||
циального уравнения |
р = |
1 |
( β - βС ) |
|
будет отрицательным |
||||||||
|
J |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(р<0), то есть система электропривода будет устойчива лишь при условии, что β−βС<0, то есть когда β<βС.
Рассматривая вопрос об устойчивости движения электропривода, необходимо отметить, что имеются рабочие механизмы с так называемой парой трения (колесорельс, прокатываемый металл-валок и др.), при работе которых может быть устойчивое или неустойчивое движение с так называемыми фрикционными колебаниями. На рис. 2.7 и 2.8 показаны возможные сочетания механических характеристик ω=f(М) и МС=f(ω) для таких механизмов.
На рис. 2.7 – устойчивое состояние электропривода, а на рис. 2.8 – неустойчивое состояние, в чем можно убедиться, выяснив сочетание знаков Δω и МJ при выведении электропривода из состояния равновесия.
123

ω |
|
ω |
|
|
|||||
|
|
+Δω, - МJ |
|
|
+Δω, + МJ |
|
|
||
|
|
-Δω, + МJ |
|
|
-Δω, - МJ |
|
|
||
|
|
|
|
М |
|
|
|
МС |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
МС |
М |
|
|
М |
|
М |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||||
|
РисунокРисунок 2.7 |
|
РисунокРисунок 2.8 |
|
|
||||
Изложенный выше вопрос о статической устойчивости электропривода справедлив лишь для разомкнутых систем, то есть для электроприводов без внешних обратных связей, усложняющих уравнения, описывающие движение электропривода.
Электромеханические характеристики электро-
привода – это зависимость скорости вращения двигателя в функции тока электродвигательного устройства, то есть ω=f(I). Для машин постоянного тока I – это ток якоря, а для асинхронных двигателей это ток ротора.
Реальные механические и электромеханические ха-
рактеристики электропривода не всегда соответствуют теоретическому представлению о них. Например, для двигателя постоянного тока с независимым возбуждением характеристики, рассчитанные для постоянного потока (Ф=const) и показанные на рис. 2.9 и 2.10 сплошными линиями, являются линейными.
В реальных условиях из-за действия реакции якоря
124

(особенно при i>IН и М>МН) линейный характер характеристики искажается. Размагничивающее действие реакции якоря ослабляет магнитный поток двигателя, что приводит к росту скорости. Ток короткого замыкания IКЗ при этом
остается неизменным ( IКЗ = UН R , где R – полное сопротив-
ление цепи якоря). Величина момента короткого замыкания МКЗ из-за снижения магнитного потока несколько уменьшается (МКЗ=СФIКЗ).
ω |
ω |
|
ω0 |
ω0 |
β>0 |
|
|
|
|
|
|
|
|
i |
|
М |
IН |
I |
КЗ |
М |
МКЗ |
|
|
Н |
||
|
Рисунок 2.9 |
Рисунок 2.10 |
||
В некоторых случаях из-за большого размагничивающего действия реакции якоря механическая характеристика (см. рис. 2.10) может иметь участок с β>0 (участок с положительной жесткостью), что ведет к неустойчивой работе электропривода.
В современных электродвигателях постоянного тока последовательно с обмоткой якоря включают специальную компенсационную обмотку, которая устраняет размагничивающее действие продольной реакции якоря. Влияние поперечной реакции якоря очень мало, и оно сводится к минимуму установкой щеток.
При дальнейшем изложении курса во всех расчетах
125

и рассуждениях реакция якоря будет считаться скомпенсированной, и магнитный поток двигателя постоянного тока с независимым возбуждением Ф=const. Для двигателей с последовательным и смешанным возбуждением будем полагать магнитный поток зависящим от тока якоря в соответствии с кривой намагничивания. Это второе допущение, принятое в теории электропривода.
Классификация механических и электромеханиче-
ских характеристик электроприводов по способу включения двигателя следующая:
1.Естественные характеристики в случае такого подключения двигателя к источнику питания, при котором
выполняются условия U=UН, Ф=ФН, RВНЕШ=0, т.е. во внешних цепях двигателя нет добавочных сопротивлений.
2.Искусственные характеристики, получаемые при одном из следующих способов:
+ |
|
|
|
|
|
|
|
|
|
|
|
- |
2.1. |
При |
U=UН, |
|
|
|
|
U |
|
RВНЕШ |
Ф=ФН, RВНЕШ¹0. При такой |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
схеме включения последова- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
тельно с якорем |
(ротором |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ |
- |
|
|
|
|
асинхронного |
двигателя) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
включается |
добавочное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
внешнее сопротивление, но потоков энергии, идущих вне главных цепей электрической машины, нет. Вся энергия, забираемая из питающей сети или отдаваемая в эту сеть,
проходит через машину. |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
U=UН |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
2.2. При Ф=ФН, UЯ¹UН, |
|
|
|
|
|
|
|
|
|
|
||||||
|
RВНЕШ |
|
|
|
|
|
|
|
|
|||||||
якорь двигателя подключен к |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
части RВНЕШ по так называемой |
|
|
|
|
|
|
|
|
|
|
RВНЕШ |
|
||||
потенциометрической |
схеме. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Часть энергии, забираемой из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сети или отдаваемой машиной, |
|
|
|
UЯ |
|
|
|
|
|
|
|
|
|
|||
+ |
|
|
|
|
|
|
|
|
|
|||||||
проходит через RВНЕШ. |
|
|
|
|
|
|
- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
126