

зеленов / eletsehomt48
.pdfранее |
известному |
ω |
|
|
|
||
правилу |
(при |
М*=1, |
|
|
* |
|
|
то есть при М=МН, |
|
|
R Я |
|
|||
R*=s). Расчет ясен из |
|
|
|
|
|||
рис. 2.37. |
|
пуске |
|
|
r*ПУСК |
|
|
При |
|
|
|
|
|||
реверсивного |
элек- |
|
|
|
|
||
тропривода, |
имею- |
|
|
|
|
||
щего ступень сопро- |
|
|
|
М(I) |
|||
тивления rПВ, это |
|
|
|
||||
сопротивление |
обес- |
МПРЕД |
МС |
r*ПВ |
МПУСК |
||
печивает |
создание |
|
|
|
|||
так |
называемой |
|
|
|
|
||
предварительной |
|
|
|
|
|
||
ступени пуска, ис- |
|
|
|
|
|||
пользуемой для |
вы- |
|
|
|
|
||
борки люфта и натя- |
-ω |
МН |
|
|
|||
жения передачи |
к |
|
|
||||
рабочей машине. |
|
|
Рисунок 2.37 |
|
|||
2.4.4 Сводная диаграмма электромеханических (механических) характеристик двигателя для различных режимов работы
На рис. 2.38 в плоскости 4-х квадрантов показаны все режимы работы двигателя с независимым возбуждением, а также выражения для расчета тока в цепи якоря для каждого из этих режимов.
2.5 Переключения в цепях двигателя с независимым возбуждением при изменении его фазовых координат или параметров
Зачастую для уяснения режима работы электропривода, для расчета пусковых или тормозных сопротивлений в цепях якоря двига-
теля при изменении фазовых координат (ω, I, М) или его параметров (R, Ф) необходимо показать диаграмму переключений и переход рабо-
чей точки (то есть меняющихся координат ω-I или ω-М) с одной электромеханической характеристики на другую.
Построение таких диаграмм производится при выполнении следующих условий:
1. любое переключение происходит мгновенно, то есть при
ω=const;
167

|
|
ω |
идеальный холо- |
|
рекуперативное |
|
стой ход |
(I=0) I=(UН-Е)/R |
|
|
|
|||
|
|
|
|
|
торможение |
ω0 |
|
|
|
I=-(Е-UН)/R |
|
|
|
|
|
|
|
|
|
динамическое |
|
|
двигательный |
|
торможение |
|
|
режим прямого |
|
I=-E/R |
|
|
|
хода |
I=-(UН+Е)/R |
|
|
|
|
противовклю- |
|
|
эл.магн. тормоз |
|
чение |
|
|
||
|
|
(I=U/R) |
|
|
-I(М) |
|
|
I(М) |
|
|
|
|
||
эл.магн. |
|
|
динамическое |
|
тормоз |
|
|
торможение |
|
(I=-U/R) |
|
|
|
I=E/R |
|
|
|
|
I=(UН+Е)/R |
|
|
|
|
противовк- |
|
|
|
|
лючение |
двигательный |
|
|
|
|
режим обратного |
|
|
|
|
хода I=-(UН-Е)/R |
|
|
|
|
идеальный |
|
-ω0 I=(Е-UН)/R |
|
|
холостой |
|
|
рекуперативное |
|
ход (I=0) |
|
|
||
-ω |
|
торможение |
||
|
|
|||
|
|
|
|
|
Рисунок 2.38
2.если МС>М, то идет процесс торможения до скорости, при которой М=МС (для активной нагрузки, или ω=0 при реактивном моменте сопротивления);
3.если МС<М, то идет процесс разгона до скорости, при которой М=МС.
На рис. 2.39 до начала переключений электропривод работает
вдвигательном установившемся режиме (М=МС) на естественной характеристике в точке а. После ослабления магнитного потока до значения Ф’<ФН двигатель переключается (линия аб), и так как М>МС, то
168

начинается |
раз- |
|
ω/ |
ω |
|
|
|
||
гон |
электропри- |
|
0 |
Ф’<ФН |
|
||||
вода до точки в, в |
е |
г |
ω0 |
|
в |
|
|||
которой |
снова |
|
|
б |
|||||
наступает |
уста- |
|
|
|
д |
|
|||
|
|
|
|
|
|||||
новившийся |
ре- |
|
|
|
а |
|
|||
|
з |
|
|
|
|||||
жим, |
но с боль- |
|
|
|
|
Ф=ФН |
|||
шей скоростью. |
|
ж |
|
|
|
||||
|
|
|
|
|
|||||
|
|
При вто- |
-М |
|
0 |
|
МС |
М |
|
ром |
переключе- |
|
|
||||||
нии |
магнитный |
|
|
|
|
|
|
||
поток увеличива- |
|
|
|
|
|
|
|||
ется до значения |
|
|
|
|
|
|
|||
ФН (линия вг), и |
|
-МС |
|
|
|
|
|||
двигатель тормо- |
|
|
|
|
|
||||
зится |
в |
режиме |
|
|
-ω0 |
|
|
|
|
рекуперации |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
энергии |
по |
ха- |
|
-ω |
|
|
|
||
рактеристике гд в |
|
Рисунок 2.39 |
|
|
|||||
начале (до скоро- |
|
|
|
||||||
сти ω=ω0) в генераторном режиме, а при ω<ω0 – в двигательном ре-
ω0 |
ω |
|
жиме. |
|
В |
а |
|
точке |
д |
||
б |
|
|
про- |
||
|
|
|
водится |
оче- |
|
|
|
|
редное |
|
пере- |
|
|
|
ключение (ли- |
||
|
|
|
ния де), и дви- |
||
-МС |
|
|
гатель |
|
пере- |
|
|
М водится в ре- |
|||
-М |
МС |
|
жим |
проти- |
|
|
|
|
вовключения, |
||
в |
|
|
тормозится в |
||
|
|
этом |
режиме |
||
г |
|
|
|||
|
|
|
до точки ж, а |
||
д |
|
ж |
затем |
|
пере- |
|
ключается |
||||
|
|
||||
е |
-ω0 |
|
(линия жз) в |
||
-ω |
|
|
режим |
|
дина- |
Рисунок 2.40 |
|
мического |
|||
|
|
|
|
||
|
169 |
|
|
|
|

торможения. От точки з до w=0 двигатель снижает скорость в режиме динамического торможения.
На рис. 2.40 до начала переключений электропривод работает в установившемся режиме на естественной механической характеристике в точке а. Переключением (изменением полярности на якоре двигателя) электропривод по линии аб переводится в режим торможения противовключением, который идет по характеристике бв до скорости w=0. Так как при этом ½М½>½МС½, то начинается разгон двигате-
|
ω |
|
|
ля |
в |
двига- |
|
ω0 |
|
|
тельном |
ре- |
|||
|
а |
|
|
жиме |
обрат- |
||
б |
|
|
|
ного |
хода |
до |
|
|
|
|
|
точки в, а за- |
|||
|
|
|
|
тем по линии |
|||
|
|
|
|
вгде |
|
путем |
|
-М |
МС |
|
М |
двух |
|
пере- |
|
|
|
ключений |
|||||
|
|
|
|
|
|||
|
|
|
|
пусковых |
со- |
||
|
|
|
|
противлений |
|||
|
|
|
|
двигатель |
пе- |
||
|
д |
|
|
реводится |
в |
||
|
|
|
|
установив- |
|||
|
-ω0 |
|
|
шийся |
режим |
||
|
|
|
|
|
обратного |
||
|
|
|
|
хода (точка е) |
|||
|
|
|
|
|
|
|
при |
|
|
|
|
½М½=½МС½. |
|||
|
|
г |
|
Из |
|
устано- |
|
|
в |
|
вившегося ре- |
||||
|
|
|
|||||
-ω |
|
|
жима |
работы |
|||
|
|
|
|||||
|
|
|
|
в точке е дви- |
|||
Рисунок 2.41 |
|
|
гатель |
пере- |
|||
|
|
|
|
ключается |
в |
||
режим динамического торможения (линия еж) и уменьшает свою ско-
рость до w=0.
На рис. 2.41, как и в ранее рассмотренных примерах, до начала переключений электропривод работает в установившемся двигательном режиме в точке а (М=МС). По линии аб привод переключается в режим противовключения и начинает снижать скорость по механической характеристике бв.
170
Затормозившись до скорости w=0, двигатель не остановится, так как М¹МС, а будет продолжать движение, перейдя в двигательный режим обратного хода. В этом режиме разгон электродвигателя про-
должается до скорости -w0 (идеальный холостой ход), после чего двигатель продолжает разгоняться далее в режиме рекуперации энергии в сеть до точки в, где М=МС. Это установившийся режим с рекуперацией энергии. Затем двигатель еще раз переключается по линии вг в режим динамического торможения и снижает свою скорость до точки д. С этой скоростью двигатель будет работать в установившемся режиме при М=МС (с активным моментом сопротивления движению).
2.6 Электромеханические свойства электроприводов постоянного тока с двигателями последовательного и смешанного возбуждения при двигательном режиме работы
2.6.1 Область применения, преимущества и недостатки двигателей с последовательным и смешанным возбуждением
О б л а с т ь п р и м е н е н и я . Наиболее широко эти двигатели применяются в электротяге (магистральный, городской и внутризаводской электротранспорт), а также для электропривода грузоподъемных механизмов, особенно для электропривода подъемных лебедок специальных кранов в металлургических цехах. Область применения определяется рядом преимуществ, присущих этим типам двигателей.
П р е и м у щ е с т в а . Двигатели с последовательным возбуждением требуют меньшего числа троллеев для подвода электропитания, характерный пример этого – электроприводы трамваев и троллейбусов. Двигатели с последовательным и смешанным возбуждением имеют большую (по сравнению с двигателями независимого возбуждения) перегрузочную способность по моменту, эти двигатели более надежны (особенно двигатели последова-
171
тельного возбуждения, имеющие малое межвитковое напряжение в обмотке возбуждения), не боятся снижения напряжения в питающей сети. При применении рассматриваемых двигателей для электроприводов механизмов с резкими пиками нагрузки мягкость механической характеристики (особенно в области малых нагрузок) обеспечит таким приводам преимущество. При пике нагрузки двигатель автоматически снижает скорость, разряжая запас кинетической энергии на вал рабочей машины. При этом ограничивается величина толчков тока в якоре. Малые грузы поднимаются с большей скоростью, а большие – с малой скоростью. Причем это производится автоматически за счет специфики механических характеристик, а не за счет сложных регулирующих устройств.
Н е д о с т а т к и . Двигатели со смешанным и последовательным возбуждением (особенно последние) нельзя включать в сеть вхолостую или с малой статической нагрузкой, так как скорость их в этих случаях превысит допустимые значения, и наступит «разнос» двигателя, сопровождающийся повреждением бандажей и обмоток под действием центробежных усилий.
Двигатели с последовательным и смешанным возбуждением имеют большую стоимость по сравнению с двигателями независимого возбуждения той же мощности и скорости. Это объясняется большим расходом активных материалов (железа и меди) для обеспечения большей перегрузочной способности по току и моменту.
2.6.2 Естественные электромеханические и механические характеристики
Для двигателей с последовательным и смешанным возбуждением уравнения электромеханических и механических характеристик получаются из уравнения электрического равновесия цепи якоря и имеют формально те же
172

выражения, что и для двигателя независимого возбуждения, а именно:
ω = |
UН − IRОБМ |
; ω = |
UН |
− |
МRОБМ |
, |
(2.57) |
СФ |
СФ |
(СФ)2 |
|||||
где RОБМ=rЯ+rДП+rКО+rОПВ+rЩ |
|
(2.58) |
|||||
– полное сопротивление якорной цепи, включая и сопротивление rОПВ обмотки последовательного возбуждения. Остальные обозначения те же, что и для двигателя с независимым возбуждением.
Выражения (2.57) нелинейны, так как Ф¹const, Ф=f(I). Поэтому указанными выражениями для w=f(I) и w=f(М) нельзя пользоваться для аналитических расчетов и для построения естественных и искусственных характеристик. Нелинейность Ф=f(I) – кривая намагничивания двигателя – не описывается аналитически, или описывается приближенно и очень сложно аппроксимирующими формулами.
Ф |
С целью |
общего ана- |
|
литического |
исследования |
(причем исследования только качественного) сделаем допущение о линейности кривой намагничивания двигателя, то есть предположим, что электрическая машина работает без насыщения магнитной це-
I пи, когда Ф=КI и
 М=СФI=СКI2. На рис. 2.42 и 2.43 показана линеаризация кривых намагничивания двигателей с последовательным
М=СФI=СКI2. На рис. 2.42 и 2.43 показана линеаризация кривых намагничивания двигателей с последовательным
(рис. 2.42) и со смешанным (рис. 2.43) возбуждением. Коэффициент К=tga определяет угол наклона линейной кри-
173
вой намагничивания к оси токов в якоре.
Для двигателя смешанного возбуждения уравнения
Ф |
|
будут |
несколько |
иные |
||||||||||
|
(так как Ф=Ф0+КI), но |
|||||||||||||
|
|
|||||||||||||
|
|
это не меняет результа- |
||||||||||||
|
|
тов анализа, показан- |
||||||||||||
Ф0 |
|
ного |
далее для двига- |
|||||||||||
Ф=Ф0+КI |
|
теля |
с последователь- |
|||||||||||
|
ным возбуждением. |
|||||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
С |
учетом |
сде- |
|||||
α |
|
ланного |
|
допущения |
||||||||||
|
уравнение |
(2.57) |
элек- |
|||||||||||
-I |
I |
|||||||||||||
IН |
|
тромеханической |
ха- |
|||||||||||
|
рактеристики |
двигате- |
||||||||||||
Рисунок 2.43 |
|
|||||||||||||
|
ля с последовательным |
|||||||||||||
возбуждением преобразуется следующим образом: |
|
|
|
|
||||||||||
ω |
ω = |
UН |
|
− |
IRОБМ |
|
= |
UН |
|
− |
IRОБМ |
, |
||
|
|
СФ |
|
|
|
СФ |
|
СКI |
СКI |
|||||
|
то есть |
|
А |
|
|
|
|
|
|
|
|
|||
|
|
ω = |
|
− В . |
|
|
|
|
(2.59) |
|||||
|
|
|
I |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
На рис. 2.44 показа- |
|||||||||||
I |
на |
электромеханическая |
||||||||||||
характеристика двигателя, |
||||||||||||||
Всоответствующая уравнению гиперболы (2.59).
Рисунок 2.44 |
А |
|
|
А1 |
|
Так как М = СКI 2 , то |
|||
ω = |
|
|
− В = |
|
− В . |
(2.60) |
|||
|
|
|
|
|
|||||
М |
|
М |
|||||||
|
|
|
|
|
|
|
|
||
 СК
СК
Таким образом, механическая характеристика двигателя также имеет гиперболический характер.
В реальных электрических машинах с последова-
174

тельным или со смешанным возбуждением из-за насыщения магнитной системы гиперболический характер механических и электромеханических характеристик сильно искажается.
Выразить кривые намагничивания аппроксимирующим уравнением практически невозможно (предлагаемые для этого аналитические зависимости очень сложны и дают большую погрешность). Поэтому для практического использования применяют естественные механические и электромеханические характеристики, получаемые экспериментальным путем заводом-изготовителем электрических машин и приводимые в каталогах.
Для электрических машин какой-либо одной серии (одного типа), например для машин МП, ДП, Д-800 или др., механические (электромеханические) характеристики в относительных единицах совпадают, образуя так называемые универсальные естественные характеристики (практически они несколько отличаются для двигателей мощностью Р><10 кВт).
|
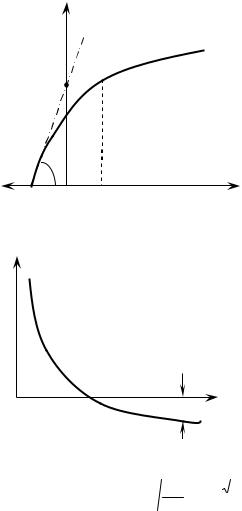
Впервые универсальные естественные характери- |
||
стики были полу- |
М*, ω* |
||
чены в 30-х годах |
М=f(I) |
||
20 века |
инжене- |
|
|
ром Вешеневским |
|
||
С.Н. В каталогах |
|
||
эти |
универсаль- |
|
|
ные |
характери- |
|
|
стики |
задаются в |
1 |
|
виде, |
показанном |
ω=f(I) |
|
на рис. 2.45. |
|||
|
Магнитная |
I* |
|
система |
двигате- |
1 |
|
лей с |
последова- |
Рисунок 2.45 |
|
тельным |
или |
|
|
175

смешанным возбуждением насыщается при I<IН. При больших токах магнитный поток двигателя растет медленнее и поэтому жесткость механической характеристики увеличивается, она становится похожей на характеристику двигателя с независимым возбуждением (то есть при
Ф=const).
2.6.3 Расчетная кривая намагничивания («переходная» характеристика)
Получить экспериментально характеристику намагничивания (характеристику холостого хода) двигателя последовательного или смешанного возбуждения невозможно, так как нельзя получить режим работы при I=0 (при этом у двигателей последовательного возбуждения поток должен быть равен нулю, что делает работу двигателя невозможной).
Кроме того, при I¹0 и Ф¹0 начинает сказываться размагничивающее действие реакции якоря, что искажает магнитный поток и также делает невозможным экспериментальное снятие характеристик холостого хода.
Характеристику холостого хода (характеристику намагничивания) для двигателей с последовательным или смешанным возбуждением можно получить только расчетным путем. При этом для вычисления потока Ф удоб-
но воспользоваться косвенной величиной ωЕ [В×с], полу-
чаемой из известного соотношения:
= æ Е ö .
СФ ç ÷ è ω ø
Е = СФω , откуда
(2.61)
За базовую величину потока в этом случае целесо-
æ |
ö* |
|
|
ç |
UН |
÷ |
= 1, а не |
|
|||
образно принять ç |
÷ |
||
è |
ωН ø |
|
|
æ |
ö* |
|
ç |
ЕН |
÷ |
|
||
ç |
÷ . |
|
è |
ωН ø |
|
Таким образом, за единичный (базовый) магнитный
176