

Kurs_vysshei_matematiki_UP_Berkov_N.A._2007-2
.pdf










 Km
Km  Lm
Lm 















x = l
|
|
|
|
m = M − 1 |
|||
|
|
˜ |
|
˜ |
|
|
|
yM = LM yM−1 + KM ; |
|
|
|||||
yM−1 = LM−1yM + KM−1. |
|||||||
|
|
|
˜ |
|
˜ |
|
|
yM = |
LM KM−1 |
+ KM |
. |
|
|||
|
˜ |
|
|
||||
|
|
|
|
1 − LM LM−1 |
|
|
|
|
˜ |
˜ |
|
|
|
||
|
LM |
KM |
|
|
|
||
|
|
β1KM−1 + hγ2(tn+1) |
|||||
yM = |
|
β0h + β1 − β1LM−1 |
. |
||||












 ym
ym  m = 0, 1, . . . , M
m = 0, 1, . . . , M
m = 0 |
L0 K0 |
m = m + 1 |
Lm Km |
m < M |
|










 yM
yM









 ym
ym 















 m = m − 1
m = m − 1 


 m > 0
m > 0 











n + 1




 |bm| > |am| + |cm|
|bm| > |am| + |cm| 

















n = 0 














 t = 0
t = 0






 n + 1
n + 1

















 t = (n + 1)τ n = n + 1
t = (n + 1)τ n = n + 1



 n < M
n < M

O(τ ) + O(h2)
|
|
δumn+1 − δumn |
− |
a2 δumn |
+1 − 2δumn + δumn −1 |
= 0. |
|||||||||||
|
|
τ |
|
|
|
|
|
|
|
h2 |
|
|
|
||||
|
δumn+1 − δumn |
|
|
|
|
n+1 |
|
|
|
n+1 |
= 0. |
||||||
|
|
a2 δum+1 − 2δumn+1 + δum−1 |
|||||||||||||||
|
|
τ |
|
− |
|
|
|
|
|
|
h2 |
|
|
|
|||
|
|
|
|
|
δumn = λneiwh |
|
|
|
|
|
λneiwh |
||||||
|
|
|
λ − 1 |
− |
a2 |
eiwh |
− 2 + e−iwh |
= 0. |
|
|
|||||||
|
|
|
|
|
|
||||||||||||
|
|
|
τ |
|
|
|
h2 |
|
|
|
|
|
|
||||
|
|
eiwh +e−iwh = 2 cos wh2 |
1−cos wh = 2 sin2 wh/2 |
||||||||||||||
eiwh − 2 + e−iwh = 2(cos wh − 1) = −4 sin wh/2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
τ a2 |
|
wh |
|
|
|
||
|
|
|
|
λ = 1 − 4 |
|
sin2 |
|
. |
|
|
|
||||||
|
|
|
|
h2 |
2 |
|
|
|
|||||||||
λ < −1 |
|
|
|
|
|
|
|
|
|
|
τ /h2 |
λ 1 |
|||||
|
|
|
|
|
|
|
|
|
|
sin2 wh/2 = 1 |
|||||||
λ = 1 − 4ra2 −1,
|
|
|
|
r |
1 |
|
. |
|
|
|
|
|
|
|
|
2a |
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
t x |
|
|
|
|
|
|
|
|
|
|
|
τ |
− |
|
|
h2 |
|
||||||
λ − 1 |
|
a2 |
|
λ eiwh − |
2 + e−iwh |
|
= 0. |
||||
|
|
|
|
|
. |
||||||
|
λ = |
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|λ| 1 |
|
|
1 + 4ra2 sin2 wh/2 |
|
|
||||||
|
|
|
|
r |
|
|
|
|
|
||
























 u
u











 t
t
















































 f
f 













































 F
F 













































 ak
ak 






 u(x, t)
u(x, t) 







































































 ak
ak 























 u(x, t)
u(x, t) 











































 ak
ak 













 u(x, t)
u(x, t) 






















 u0 = 100
u0 = 100  a = 1
a = 1  x1 = 1
x1 = 1  x2 = 3
x2 = 3  x [A, B]
x [A, B] A = −3 B = 7
A = −3 B = 7
T OL := |
0.0001 |
ORIGION := 0 |
N := 5 M := 100 |
a := 1 |
||||||||||||||||||||||
A := |
− |
3 |
B := 7 |
|
n := 0..N |
|
|
|
m := 0..M |
h := |
|
B − A |
||||||||||||||
|
|
|
|
|
M |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
t0 := 0 |
|
t1 := 0.1 t2 := 0.4 t3 := 1 |
|
|
|
|
|
|
|
|||||||||||||||||
t4 := 5 |
|
t5 := 20 xm := A + h · m |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Ψ(x) := |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 if x < 1 x > 3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
otherwise |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(x, t) := |
|
|
|
|
1 |
|
t < 0.0001 |
− |
|
|
−2 |
|
|
|
|
|
|
|||||||||
Ψ(x) |
if |
|
|
(τ |
· |
|
x)2 |
|
|
|
||||||||||||||||
|
|
|
|
|
2 |
· |
a |
· |
√π |
· |
t 1 |
· |
|
|
|
|
|
|
· |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ(τ ) |
|
e |
|
|
4 a |
|
|
t dτ |
otherwise |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Um,n := |
u(xm, tn) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

u(x, t) 






 t = {0; 0, 1; 0, 4; 1; 5; 20}
t = {0; 0, 1; 0, 4; 1; 5; 20}
U <0> |
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U <1> |
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U <2> |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U <3> |
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U <4> |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U <5> |
0 |
-1 |
1 |
|
3 |
5 |
7 |
|
-3 |
x |
|||||
|
A |
|
|
|
|
B |
|
|
|
|
|
|
|









 U (x, tn)
U (x, tn) 































































 t → ∞
t → ∞ 






































 u → 0
u → 0 


















































 ρ
ρ
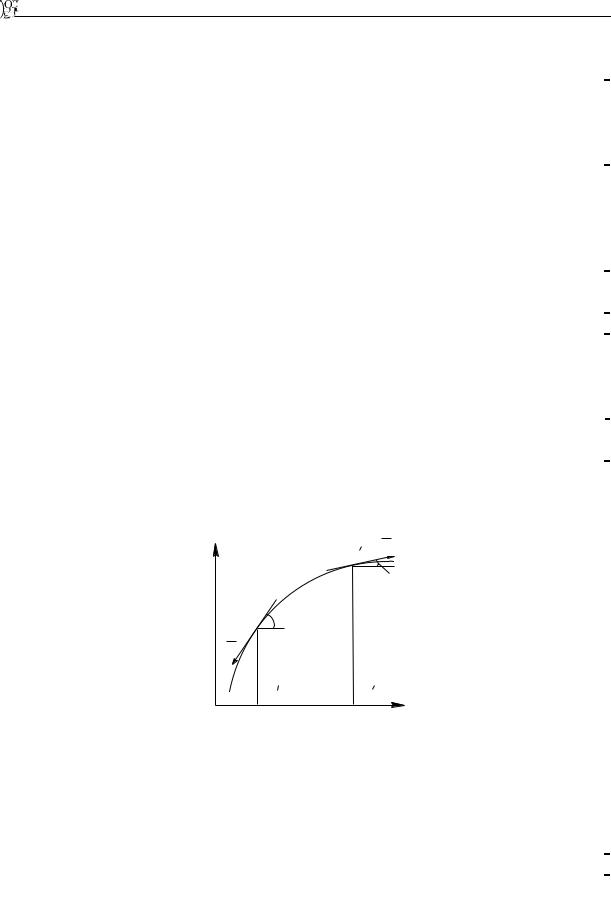
u(x, t)  ux(x, t)
ux(x, t) 



















 cos α ≈ 1 tg α ≈ sin α ≈ α
cos α ≈ 1 tg α ≈ sin α ≈ α 

 α
α
|
|
|
|
|
|
0x |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
| |
M M1 |
| = | |
M M1 |
| |
|
|
|
|
|
|M M1| |
|
|
|
||||||||
|
|
|
|
|
|
|
| = x1 |
|
|
|
|
|
|
|
|
|
| |
|
|
|
1 + ux2dx. |
||
|
|
|
|
|
M M1 |
||||||
|
|
|
|
|
|
|
|
x |
" |
|
|





 ux2
ux2 






x1
|M M1| ≈ dx = x1 − x = |M M1|.
x








 T
T
¯ |
¯ |
| = T |
|T |
| = |T1 |
0u








 g(x, t)
g(x, t) 








































 M M1
M M1 



































 0u
0u
|
0u |
|
¯ |
| sin α = T (sin α1 |
− sin α) = T (tg α1 − tg α). |
F1 = |T 1| sin α1 − |T |














 tg α = ux(x, t)
tg α = ux(x, t)  tg α1 = ux(x + dx, t)
tg α1 = ux(x + dx, t) 
F1 = T (ux(x + dx, t) − ux(x, t))

dux(x, t) = uxx(x, t)dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ux(x, t) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2u |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
F1 = T |
|
|
|
|
dx. |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
∂x2 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
F2 = g(x, t)| |
M M1 |
| = g(x, t)| |
M M1 |
| = g(x, t)dx. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M M1 |
|
|
|
|
|
|
|||||||
|
|
dm = ρ|M M1| = ρdx |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
utt(x, t) |
|
M M1 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0u |
|
∂2u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2u |
|
|
|
|
∂2u |
|||||||
dm |
|
= F1 + F2 |
|
|
|
|
|
|
|
ρdx |
|
|
|
|
= T |
|
|
|
|
|
dx + g(x, t)dx. |
|||||||||
2 |
|
|
|
|
|
∂t |
2 |
|
∂x |
2 |
||||||||||||||||||||
|
∂t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ρdx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
∂2u |
|
|
|
|
T ∂2u |
|
g(x, t) |
|
|
|||||||||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
, |
|
|
|||||||||
|
|
2 |
|
|
2 |
|
|
|
|
ρ |
|
|
|
|||||||||||||||||
|
|
|
|
∂t |
|
|
|
|
ρ ∂t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
T /ρ = a2 g(x, t)/ρ = F (x, t) |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
∂2u |
= a |
2 ∂2u |
+ F (x, t). |
|
|
||||||||||||||||||||||
|
|
|
2 |
|
|
|
∂x |
2 |
|
|
||||||||||||||||||||
|
|
|
|
∂t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g(x, t) = 0 F (x, t) = 0 |
||||||||||
|
|
|
|
|
|
|
∂2u |
|
|
2 ∂2u |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
= a |
|
|
|
|
|
. |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
2 |
|
|
|
∂x |
2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
∂t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||














 T
T 




























 F (x, t)
F (x, t) 
g(x, t) = 0 F (x, t) = 0

|
|
|
|
t = 0 |
||
u |
|
|t=0 |
|
u(x, t)|t=0 = ϕ(x) |
||
(x, t) |
= ψ(x) |
ϕ(x) ψ(x) |
|
|
||
|
||||||
t |
|
|
|
|
|
|
|
|
|
|
u(x, 0) = ϕ(x), ut(x, 0) = ψ(x). |
||




 l
l 






















 x = 0
x = 0  x = l
x = l
u(0, t) = 0, u(l, t) = 0.
σ |
x |
t |
u(x, t) |





































 σ
σ  σ1
σ1 
























































 σ
σ  σ1
σ1 



















































 dx
dx
u(x + dx, t) − u(x, t) = ux(x, t). dx
σσ1
0 |
x |
x1=x+dx |
l |













 T
T 






 σ
σ



 T = ESux(x, t)
T = ESux(x, t)


 S
S 

























 E
E 




















































 T1
T1 






 σ1
σ1  T1 = ESux(x + dx, t)
T1 = ESux(x + dx, t)
T1 − T = ES #ux(x + dx, t) − ux(x, t)$ = ES(∂2u/∂x2)dx.
ρSdx 

 ρ
ρ
|
∂2u |
= ES |
∂2u |
∂2u |
= a2 |
∂2u |
|
|||
ρSdx |
|
|
|
dx, |
|
|
|
, |
||
2 |
|
2 |
2 |
|
2 |
|||||
|
∂t |
|
∂x |
∂t |
|
∂x |
|
|||


 a2 = E/S
a2 = E/S
x = 0
u|x=0 = 0
T |
x = l ESux(l, t) = 0 |
∂u
∂x x=l = 0.
∂u
u|x=0 = 0, ∂x x=l = 0.
|
t = 0 |
|
x = l |
|
|
|
Q |
T |
|
|
|
||
|
|
∂u |
|
|
Q |
|
|
|
|
|
|
|
|
|
Q = ESux(l, t), |
∂x |
x=l |
= |
ES |
. |
|
|
|
|
|
|
|